You might also like
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Fundamentals of Photonics Chapter 1Document59 pagesFundamentals of Photonics Chapter 1orhan şentürk100% (1)
- Aula2 2023Document51 pagesAula2 2023António Pedro AbreuNo ratings yet
- Mass Transfer OperationDocument22 pagesMass Transfer Operationneerajtrip123No ratings yet
- BELETSKI Regular and Chaotic Motions Applied To Rigid BodiesDocument12 pagesBELETSKI Regular and Chaotic Motions Applied To Rigid BodiesalanNo ratings yet
- Chapter 6 - Maneuvering Theory: Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Document27 pagesChapter 6 - Maneuvering Theory: Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Cao Quang HưngNo ratings yet
- Kinematics Circular MotionDocument9 pagesKinematics Circular Motionchemsac2No ratings yet
- Fundamentals of Photonics Chapter 2Document43 pagesFundamentals of Photonics Chapter 2orhan şentürkNo ratings yet
- Symmetry and Molecular SpectrosDocument11 pagesSymmetry and Molecular Spectrosmrio2No ratings yet
- 8.1 Wind Forces and Moments 8.2 Wave Forces and Moments 8.3 Ocean Current Forces and MomentsDocument39 pages8.1 Wind Forces and Moments 8.2 Wave Forces and Moments 8.3 Ocean Current Forces and MomentsCao Quang HưngNo ratings yet
- Elastic Column Buckling and The Effect of End RestraintDocument2 pagesElastic Column Buckling and The Effect of End RestraintSandeep VaishnavNo ratings yet
- Joukowski Airfoil in Potential Flow Without Complex Numbers PDFDocument110 pagesJoukowski Airfoil in Potential Flow Without Complex Numbers PDFChacho BacoaNo ratings yet
- Euler Angle Rates: Aircraft Equations of Motion - 2Document9 pagesEuler Angle Rates: Aircraft Equations of Motion - 2Ali AkbarNo ratings yet
- Mach Waves: Dr. Nikos J. Mourtos - AE 164 / ME 223 1Document10 pagesMach Waves: Dr. Nikos J. Mourtos - AE 164 / ME 223 1P KNo ratings yet
- NMR of Correlated Electron Superconductors: Jürgen Haase University of LeipzigDocument27 pagesNMR of Correlated Electron Superconductors: Jürgen Haase University of LeipzigsusandhikaNo ratings yet
- H20 CSC458 Sample Final SolutionsDocument4 pagesH20 CSC458 Sample Final SolutionsDUDEKULA VIDYASAGARNo ratings yet
- LEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesDocument7 pagesLEC. (1) - Kinematics of Rigid Bodies-Definitions-Translation-Rotational Motion-ExamplesfadyNo ratings yet
- 3.1SemPYQ - SabnamLaskar (1) - RemovedDocument5 pages3.1SemPYQ - SabnamLaskar (1) - Removednayakcodes143No ratings yet
- MAE331Lecture8 PDFDocument24 pagesMAE331Lecture8 PDFPranav BhardwajNo ratings yet
- Supersonic PDFDocument10 pagesSupersonic PDFVijay ChandarNo ratings yet
- Helicopter Blade AnalysisDocument271 pagesHelicopter Blade AnalysispiolencNo ratings yet
- Aircraft Flight Dynamics 2015 - 04 - 13 PDFDocument34 pagesAircraft Flight Dynamics 2015 - 04 - 13 PDFWii RodriguezNo ratings yet
- Seismic Pushover AnalysisDocument170 pagesSeismic Pushover AnalysisDiego Alejandro Sequera100% (1)
- Flange DeflectionDocument4 pagesFlange Deflectiondroessaert_stijnNo ratings yet
- MIT8 01SC Problems25 SolnDocument17 pagesMIT8 01SC Problems25 Solnjamesp100% (1)
- Translation and Rotation KinematicsDocument24 pagesTranslation and Rotation KinematicsChennaiSuperkingsNo ratings yet
- Nine-Degree of Freedom Modeling and Flight Dynamic Analysis of Parafoil Aerial Delivery SystemDocument7 pagesNine-Degree of Freedom Modeling and Flight Dynamic Analysis of Parafoil Aerial Delivery SystemMano PrakashNo ratings yet
- Experimental Analysis of Screw Compressor Noise and VibrationDocument18 pagesExperimental Analysis of Screw Compressor Noise and VibrationBayu SuprayogiNo ratings yet
- Solutions IntDynamicsOfColloidsDocument155 pagesSolutions IntDynamicsOfColloidsPedro Canhão CostaNo ratings yet
- Wall PierDocument40 pagesWall PierLivian TeddyNo ratings yet
- Matlab&Sheet&2& & Single&Degree&of&Freedom&5&Free&and&Forced&undamped&system&Document1 pageMatlab&Sheet&2& & Single&Degree&of&Freedom&5&Free&and&Forced&undamped&system&mabooufNo ratings yet
- Martin Gear ManualDocument25 pagesMartin Gear ManualEpi Vargas AlcarazNo ratings yet
- Problem Solving Session 11 Three Dimensional Rotation and Gyroscopes SolutionsDocument9 pagesProblem Solving Session 11 Three Dimensional Rotation and Gyroscopes SolutionsReinel RodriguezNo ratings yet
- Feng 2016 J. Phys.: Conf. Ser. 744 012138 PDFDocument11 pagesFeng 2016 J. Phys.: Conf. Ser. 744 012138 PDFacar1No ratings yet
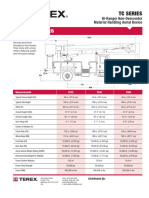
- Hi Ranger 5TC 55Document2 pagesHi Ranger 5TC 55Benjamin Hidalgo50% (2)
- Am Lication GaDocument40 pagesAm Lication GaVikas ChawanNo ratings yet
- Rigid-Body KineticsDocument21 pagesRigid-Body KineticsCao Quang HưngNo ratings yet
- Presentation W11D1 PDFDocument48 pagesPresentation W11D1 PDFMohammed SiddiqueNo ratings yet
- Note - Chapter 10Document10 pagesNote - Chapter 10CuongNgoNo ratings yet
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroRana UsmanNo ratings yet
- Construction of A Hilbert Curve On The Sphere With An Isometric Parametrization of AreaDocument20 pagesConstruction of A Hilbert Curve On The Sphere With An Isometric Parametrization of AreaValter SanchesNo ratings yet
- Dynamics1 5Document14 pagesDynamics1 5caganhasNo ratings yet
- MominertDocument2 pagesMominertLevi PogiNo ratings yet
- Robotics PPT DownloadedDocument92 pagesRobotics PPT DownloadedHarshit AgarwalNo ratings yet
- IMAC XXII Conf s28p02 Investigation Mounted Disc Brake in Plane Out Plane Modes Brake SquealDocument9 pagesIMAC XXII Conf s28p02 Investigation Mounted Disc Brake in Plane Out Plane Modes Brake Squealdivyank3dNo ratings yet
- Chapter 7 Rotational Motion - LecturerDocument25 pagesChapter 7 Rotational Motion - LecturerSahira AfuzaNo ratings yet
- Experimental AerodynamicsDocument34 pagesExperimental AerodynamicsBibhash Chandra MItraNo ratings yet
- Nationaladvisorycommittee For Aeronautics: Technical NoteDocument35 pagesNationaladvisorycommittee For Aeronautics: Technical NoteVikas ChawanNo ratings yet
- fypANG, ENGR 62, StanfordDocument35 pagesfypANG, ENGR 62, StanfordsuudsfiinNo ratings yet
- Spur Gears PDFDocument18 pagesSpur Gears PDFAbhishek MishraNo ratings yet
- Aircraft Flight Dynamics & VLM CodesDocument28 pagesAircraft Flight Dynamics & VLM CodesvishwaNo ratings yet
- Analysis: NlueDocument16 pagesAnalysis: NlueMayaNo ratings yet
- MIT8 01SC Problems24 SolnDocument8 pagesMIT8 01SC Problems24 Solnmeli zidanneNo ratings yet
- An Introduction To Infrared and UV-Visible SpectrosDocument45 pagesAn Introduction To Infrared and UV-Visible SpectrosYasir AlamNo ratings yet
- GyroscopeDocument29 pagesGyroscopeGuru Ravindra ReddyNo ratings yet
- Skeletal Variation and Adaptation in Europeans: Upper Paleolithic to the Twentieth CenturyFrom EverandSkeletal Variation and Adaptation in Europeans: Upper Paleolithic to the Twentieth CenturyChristopher B. RuffNo ratings yet
- Boiling Heat Transfer: Modern Developments and AdvancesFrom EverandBoiling Heat Transfer: Modern Developments and AdvancesR.T. Lahey Jr.No ratings yet
- An Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case StudyDocument12 pagesAn Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case StudyCao Quang HưngNo ratings yet
- ROV Devt v10 PanelsDocument3 pagesROV Devt v10 PanelsCao Quang HưngNo ratings yet
- 2016 CV - Curriculum Vitae Duy Anh 1Document11 pages2016 CV - Curriculum Vitae Duy Anh 1Cao Quang HưngNo ratings yet
- Curriculum Vitae: Personal InformationDocument3 pagesCurriculum Vitae: Personal InformationCao Quang HưngNo ratings yet
- A New Remotely Operated Underwater Vehicle For Dynamics and Control ResearchDocument8 pagesA New Remotely Operated Underwater Vehicle For Dynamics and Control ResearchCao Quang HưngNo ratings yet
- Chapter 6 - Maneuvering Theory: Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Document27 pagesChapter 6 - Maneuvering Theory: Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Cao Quang HưngNo ratings yet
- 8.1 Wind Forces and Moments 8.2 Wave Forces and Moments 8.3 Ocean Current Forces and MomentsDocument39 pages8.1 Wind Forces and Moments 8.2 Wave Forces and Moments 8.3 Ocean Current Forces and MomentsCao Quang HưngNo ratings yet
- Graduate Study at National Cheng Kung University (NCKU) - One of The Top-Tier Universities in TaiwanDocument1 pageGraduate Study at National Cheng Kung University (NCKU) - One of The Top-Tier Universities in TaiwanCao Quang HưngNo ratings yet
- Chapter 5 - Seakeeping Theory: Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Document31 pagesChapter 5 - Seakeeping Theory: Lecture Notes TTK 4190 Guidance and Control of Vehicles (T. I. Fossen)Cao Quang HưngNo ratings yet
- Rigid-Body KineticsDocument21 pagesRigid-Body KineticsCao Quang HưngNo ratings yet
- CV D ValentinssonDocument4 pagesCV D ValentinssonCao Quang HưngNo ratings yet
- CVDocument30 pagesCVCao Quang HưngNo ratings yet
- bq27520 g4Document19 pagesbq27520 g4Cao Quang HưngNo ratings yet
- STMicroelectronics STM32F4DIS BB Datasheet PDFDocument3 pagesSTMicroelectronics STM32F4DIS BB Datasheet PDFCao Quang HưngNo ratings yet
- The Dragon Runner: at The Forefront of Military SurveillanceDocument7 pagesThe Dragon Runner: at The Forefront of Military SurveillanceCao Quang HưngNo ratings yet
- Biomechanics of The KneeDocument8 pagesBiomechanics of The KneeJorge LopezNo ratings yet
- Full U-Band Rectangular Waveguide-to-Microstrip Transition Using E-Plane ProbeDocument4 pagesFull U-Band Rectangular Waveguide-to-Microstrip Transition Using E-Plane ProbeSanjib MandalNo ratings yet
- IFoA Directory of Actuarial Employers 2016-17-14102016Document22 pagesIFoA Directory of Actuarial Employers 2016-17-14102016Mian BialNo ratings yet
- Agfa CR 10XDocument4 pagesAgfa CR 10Xwisateru Inti niagaNo ratings yet
- Momus Design CNC Router Manual Version 2.1Document178 pagesMomus Design CNC Router Manual Version 2.1Francisco Teruel100% (8)
- Aeon7200 Service Manual-V00.01-A4Document37 pagesAeon7200 Service Manual-V00.01-A4annaya kitaNo ratings yet
- PET524 Saturation 1Document12 pagesPET524 Saturation 1Ronald NgueleNo ratings yet
- Executive Incentives and The Horizon Problem An - 1991 - Journal of AccountingDocument39 pagesExecutive Incentives and The Horizon Problem An - 1991 - Journal of AccountingYuhan JiNo ratings yet
- Hall 2005 NapaeinaDocument10 pagesHall 2005 NapaeinaKellyta RodriguezNo ratings yet
- TR 94 13Document25 pagesTR 94 13Christian Norambuena VallejosNo ratings yet
- Essay 1 Weight and BalanceDocument4 pagesEssay 1 Weight and BalanceHamdan Merchant83% (6)
- Elecon GearboxDocument19 pagesElecon GearboxShirley Farrace100% (3)
- ImmunologyDocument8 pagesImmunologyማላያላም ማላያላም89% (9)
- PPT5. SeptIITK - Crystal - Imperfections - DislocationsDocument92 pagesPPT5. SeptIITK - Crystal - Imperfections - DislocationsKartik Shankar KumbhareNo ratings yet
- 新型重油催化裂化催化剂RCC 1的研究开发Document5 pages新型重油催化裂化催化剂RCC 1的研究开发Anca DumitruNo ratings yet
- Hazardous Area ClassificationDocument36 pagesHazardous Area Classificationvenkeeku100% (1)
- Numbers (0, 1, 2, 3,... ) Are Defined To Be Natural Numbers, Including Zero, That Does Not ContainDocument9 pagesNumbers (0, 1, 2, 3,... ) Are Defined To Be Natural Numbers, Including Zero, That Does Not ContainRomela EspedidoNo ratings yet
- Practical - Magnetic - Design (Fill Factor) PDFDocument20 pagesPractical - Magnetic - Design (Fill Factor) PDFAhtasham ChaudhryNo ratings yet
- BS en 00405-2001 + A1-2009 PDFDocument48 pagesBS en 00405-2001 + A1-2009 PDFShan Sandaruwan AbeywardeneNo ratings yet
- Ugc Model Curriculum Statistics: Submitted To The University Grants Commission in April 2001Document101 pagesUgc Model Curriculum Statistics: Submitted To The University Grants Commission in April 2001Alok ThakkarNo ratings yet
- Histograms - 2Document6 pagesHistograms - 2Sonia HalepotaNo ratings yet
- 417 Model E Alarm Check ValvesDocument4 pages417 Model E Alarm Check ValvesM Kumar MarimuthuNo ratings yet
- Hot and Cold ApplicDocument33 pagesHot and Cold Appliccamille_12_15100% (1)
- Hydrocarbon RecoveryDocument29 pagesHydrocarbon RecoveryAlekhya BandaruNo ratings yet
- Hiley TableDocument5 pagesHiley TableHanafiahHamzahNo ratings yet
- JPSP - 2022 - 698Document10 pagesJPSP - 2022 - 698hifeztobgglNo ratings yet
- Gas Turbine Compressor WashingDocument8 pagesGas Turbine Compressor Washingwolf_ns100% (1)
- DLT Strand Jack Systems - 2.0 - 600 PDFDocument24 pagesDLT Strand Jack Systems - 2.0 - 600 PDFganda liftindoNo ratings yet
- International Marketing-Assignment No. 01Document36 pagesInternational Marketing-Assignment No. 01Faisal Shahzad60% (5)
- Multiple Choice Questions (The Answers Are Provided After The Last Question.)Document6 pagesMultiple Choice Questions (The Answers Are Provided After The Last Question.)VijendraNo ratings yet