Professional Documents
Culture Documents
D5620
Uploaded by
محمدلمينابراهيمالموريتانيCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
D5620
Uploaded by
محمدلمينابراهيمالموريتانيCopyright:
Available Formats
Le navire tout lectrique
volutions et systmes de conduite
par
Grard FILLIAU
Chef du groupe nergie Propulsion
Service des Programmes Navals
Ministre de la Dfense-DGA
Alain BONDU
Ingnieur systme
Jeumont Industrie. Division Marine
Intervenant lcole Nationale Suprieure des Techniques Avances
et
Laurent MAZODIER
Senior Business Manager
Marine and offshore Systems
Alstom Power Conversion
1.
1.1
1.2
1.3
1.4
2.
2.1
2.2
volutions ..................................................................................................
Conception ...................................................................................................
1.1.1 Gnration dnergie et conception de lusine lectrique ..............
1.1.2 Choix des tensions .............................................................................
1.1.3 Qualit du rseau................................................................................
1.1.4 Pouvoir de court-circuit. Protections. Slectivit.
Coordination des isolements.............................................................
Composants .................................................................................................
1.2.1 Machines tournantes..........................................................................
1.2.2 Tableaux et disjoncteurs ....................................................................
1.2.3 Transformateurs..................................................................................
1.2.4 Convertisseurs tournants...................................................................
1.2.5 Convertisseurs statiques....................................................................
1.2.6 lectrification des auxiliaires .............................................................
Architectures lectriques ............................................................................
1.3.1 Btiments de surface..........................................................................
1.3.2 Sous-marins ........................................................................................
Propulsion magntohydrodynamique.......................................................
1.4.1 Rappel thorique ................................................................................
1.4.2 Propulsion des navires.......................................................................
Systmes de conduite ............................................................................
Introduction..................................................................................................
Principes de fonctionnement......................................................................
2.2.1 Gnralits ..........................................................................................
2.2.2 Simplicit du systme de propulsion ...............................................
2.2.3 Fiabilit du systme de propulsion. Aptitude la redondance
en cas dincident .................................................................................
Pour en savoir plus...........................................................................................
D 5 620 2
2
3
3
4
4
4
4
4
4
4
6
6
6
7
8
8
8
8
9
10
Doc. D 5 625
e fascicule rassemble :
les perspectives dvolution, en insistant notamment sur la conception
future de lusine lectrique et du rseau de bord, type de navire (civil ou militaire, surface ou sous-marin) ;
quelques lments sur la magntohydrodynamique applique la
propulsion ;
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
D 5 620 1
LE NAVIRE TOUT LECTRIQUE
___________________________________________________________________________________________________________
une prsentation des systmes de conduite dans laquelle on remarquera
lextrme attention avec laquelle sont prvus, ds la conception, les modes de
fonctionnement en marche normale ou dgrade, les arrts durgence et la gestion de lnergie ( systme de gestion de lnergie et systme de gestion de
la propulsion ).
Dans les deux premiers fascicules, on avait situ le contexte et larchitecture
lectrique du navire tout lectrique et pass en revue les composants.
Larticle Le navire tout lectrique fait lobjet de plusieurs fascicules :
D 5 610 Propulsion et production dnergie
D 5 615 tat de lart des composants
D 5 620 volutions et systmes de conduite
Les sujets ne sont pas indpendants les uns des autres.
Le lecteur devra assez souvent se reporter aux autres fascicules.
1. volutions
1.1 Conception
1.1.1 Gnration dnergie et conception
de lusine lectrique
Si du seul point de vue du cot, de lencombrement et de la masse
globale du composant, la solution la moins chre est toujours
davoir un seul groupe lectrogne (turboalternateur ou diesel-alternateur), cette configuration nest jamais retenue pour les raisons
suivantes :
vulnrabilit la panne ;
vulnrabilit un seul impact pour les navires militaires ;
problmes darchitecture ; une seule masse concentre est
plus difficile installer que plusieurs charges que lon peut rpartir,
facilitant linstallation et lquilibre du navire ;
mauvais rendement aux faibles charges ;
rglementation (exigence dun groupe de secours) ;
maintenabilit ; il est plus facile de stocker les pices de
rechange dun petit groupe, et, ventuellement, de le rparer en
mer.
Scurit des matriels et des personnes
Lenvironnement marin relativement conducteur et les mouvements du navire orientent vers une tension la plus basse possible,
compte tenu des autres contraintes.
Choix des disjoncteurs
Compte tenu des courants de dfaut (court-circuit) susceptibles
de se produire, il faut quil existe sur le march des disjoncteurs
capables de les couper.
Masse et encombrement des quipements
Ceux-ci doivent tre les plus faibles possibles. En particulier, le
cblage de puissance gagnera en masse et en encombrement pour
des tensions nominales relativement leves.
Tension optimale des quipements
Pour une puissance donne, il existe une tension optimale des
diffrents composants (transformateurs, gnrateurs, tableaux,
etc.). Si Su (en MVA) est la puissance unitaire dun composant
donn, cette tension optimale V0 (en kV) est, pour les transformateurs et les machines tournantes, souvent donne avec une bonne
approximation par la formule :
V0 Su
1.1.3 Qualit du rseau
Par ailleurs, les gnrateurs sont dimensionns partir du bilan
des puissances actives et ractives du navire en tenant compte du
niveau de redondance requis. On scinde donc la gnration
dnergie, gnralement comme suit :
plusieurs groupes principaux (de deux six le plus souvent),
en panachant sil y a lieu les technologies diesel et turbine gaz :
une usine lectrique constitue soit de quatre groupes diesel-alternateur principaux identiques, soit de deux groupes turbine gazalternateur et de deux groupes diesel-alternateur sont les configurations les plus classiques, offrant un excellent compromis entre cot
et encombrement dune part, souplesse, facilit dinstallation, rendement aux faibles allures et redondance dautre part ;
un (parfois deux) groupe auxiliaire, utilis essentiellement
lorsque la propulsion, et donc les gnrateurs principaux, sont
larrt ;
un groupe de secours, destin alimenter quelques fonctions
essentielles lorsque le navire est en situation trs grave (redmarrage sur black-out, vacuation).
La qualit du rseau est fondamentalement dtermine par ce que
peuvent supporter les appareils utilisateurs. La philosophie actuelle,
telle que dfinie par les principales normes (CEI et normes nationales), rglements civils (Bureau Veritas, Lloyds register of shipping,
etc.) et militaires (OTAN Stanag 1008), consiste imposer des tolrances assez serres au rseau, de faon simplifier la conception
des quipements consommateurs. Dune faon gnrale, les exigences actuelles peuvent tre schmatises comme suit :
stabilit en tension 5 %
variations exceptionnelles : 16 %
retour la normale en 2 s
stabilit en frquence 3 %
variations exceptionnelles : 4 %
retour la normale en 2 s
distorsion harmonique :
totale : 5 %
individuelle (par rang) : 3 %
1.1.2 Choix des tensions
1.1.4 Pouvoir de court-circuit. Protections.
Slectivit. Coordination des isolements
La tension choisir rsulte du compromis entre les diffrentes
contraintes suivantes.
Lors de la conception dun rseau, ces critres doivent tre tudis
selon les rgles de lart du gnie lectrique.
D 5 620 2
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
____________________________________________________________________________________________________________ LE NAVIRE TOUT LECTRIQUE
1.2 Composants
B
A
1.2.1 Machines tournantes
On se reportera au fascicule [D 5 615], ( 1.3).
1.2.1.1 Machines asynchrones en gnration dnergie
La limite de faisabilit des gnratrices asynchrones en terme de
produit de la puissance par la vitesse surpassant celle des machines
synchrones, des gnrations dnergie de ce type sont donc proposes pour des puissances pouvant atteindre 1 2 MW et des vitesses de plus de 20 000 tr/min.
Une telle solution implique des redresseurs contrls commutation force, seuls capables de fournir la machine lnergie ractive
dont elle a besoin, tout en recevant lnergie active cre par la
machine.
1.2.1.2 Machines aimants en gnration dnergie
I~
En gnration dnergie, une machine excite par aimants est, par
son principe, impropre au contrle de la tension du rseau. Celui-ci
peut seulement se faire :
soit par un convertisseur command intercal entre le gnrateur et le rseau, ce qui grvera le cot, lencombrement, la masse
et le rendement du dispositif ainsi constitu ;
soit en rgulant laide du moteur dentranement la vitesse de
rotation de lalternateur, du moins quand cest possible et que les
exigences en matire de performances dynamiques ne sont pas
trop svres.
N
S
N
S
N
Ces diverses combinaisons sont toutefois appeles devenir intressantes dans lavenir, notamment lorsque lon est amen dissocier la frquence de la machine de celle du rseau ou bien si ce
dernier est continu. Dans ces deux cas, en effet, un convertisseur
tant de toute faon ncessaire, on profitera sans contrepartie des
avantages procurs par la machine aimants en matire de compacit et de rusticit.
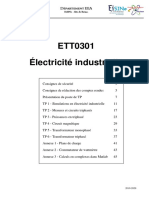
On trouvera sur la figure 1 une reprsentation schmatique de
lune des ralisations exprimentales. Le principe, couvert par des
brevets, a fait lobjet de quelques articles (voir, par exemple, [4]). Il
consiste raliser des bobinages statoriques dinduit circulaires,
centrs sur laxe de rotation, excitant des petits circuits magntiques en forme de C disposs rgulirement, suivant un pas 2p, sur
un rayon R. Le rotor porte des aimants disposs suivant un pas p,
orients alternativement NS et SN, et lon fait circuler, dans chaque
bobinage dinduit, un courant alternatif monophas. Le rotor tourne
2p
chaque priode lectrique dun angle correspondant ------- rad.
R
Dans le cas o il y a un seul circuit dinduit, il sagit dun moteur
monophas, incapable de dmarrer seul et sujet un niveau de
vibrations lectromagntiques lev.
Les structures champ axial sont en plein dveloppement. Les
premires ralisations existantes [3] laissent esprer des gains en
compacit de 15 35 % par rapport aux machines champ radial les
plus compactes, quelles soient asynchrones ou aimants.
1.2.1.4 Machines flux transverse
2p
1.2.1.3 Machines champ axial
Cela rappel, la diffrence de topologie nimplique pas de diffrence fondamentale dans les diffrents types de machines, non plus
que dans leur mise en quation, la seule remarque prs que pour
bnficier au maximum des avantages en modularit et en compacit de la structure discode, il est prfrable de privilgier les machines aimants. Pour le reste, les considrations dveloppes en
[D 5 615] sappliquent, type de machine par type de machine.
Coupe AA
S
N
N
S
S
N
N
S
S
N
R
Coupe BB
Cuivre
Aimants permanents
Circuits magntiques
Partie mcanique
N ple Nord
S ple Sud
Figure 1 Machine flux transverse
Dans le cas o il y a k circuits dinduit, il suffit de dcaler soit les
2p
circuits magntiques statoriques, soit les aimants, de ------- pour ralik
ser un circuit k-phas.
Le couple massique et le couple volumique annoncs sont excellents, mais ce moteur en est, lheure o ces lignes sont crites, au
stade de la construction dun prototype de dmonstration et il est
trop tt pour en discuter de faon sre.
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
D 5 620 3
LE NAVIRE TOUT LECTRIQUE
___________________________________________________________________________________________________________
Observons simplement que cette machine rversible comme
toutes les machines lectriques est adapte aux vitesses lentes et
aux couples levs. Son utilisation en tant que moteur de propulsion vient donc, dans la mesure o il tient ses promesses, naturellement lesprit. Par contre, une utilisation en tant qualternateur, o
lon recherche actuellement des vitesses leves permettant
laccouplement direct des turbines, parat trs peu vraisemblable
court terme.
1.2.2 Tableaux et disjoncteurs
Quils soient haute ou basse tension, ils doivent tre dimensionns aux courants nominaux et de court-circuit et aux contraintes denvironnement du navire (chocs, vibrations, humidit, temprature ambiante).
1.2.3 Transformateurs
Lutilisation de transformateurs lectriques pour alimenter les
auxiliaires et les convertisseurs de propulsion facilite normment
la conception du rseau lectrique. Leur utilisation est cependant
diffrente suivant quil sagit dun navire civil ou dun navire militaire.
Dans le cas des navires militaires, les constructeurs sont rticents fournir des transformateurs de puissance capables de tenir
les niveaux de chocs requis (de 10 30 g), pour des raisons probablement davantage lies des considrations dindustrialisation
qu des impossibilits techniques ; les machines tournantes acceptent ces niveaux moyennant des modifications somme toute assez
limites.
Lusage de transformateurs est donc exceptionnel au-del dune
certaine puissance (de lordre de quelques centaines de kilowatts),
et lon se limitait encore rcemment des tensions de rseaux de
400 V, voire 600 ou 660 V au maximum, y compris pour des puissances installes importantes. lavenir, le problme risque dtre le
plus souvent contourn par lemploi de convertisseurs statiques au
lieu de transformateurs.
Dans le cas des navires civils, il nexiste pas de restrictions
lusage des transformateurs largement employs. Outre leur fonction principale dadaptation de la tension, ils ont, du fait de leur ractance de court-circuit, plusieurs fonctions secondaires favorables :
ils contribuent limiter les courants de court-circuit, influant
favorablement sur le dimensionnement des disjoncteurs ;
placs en amont des convertisseurs, ils permettent dadapter
ceux-ci au rseau ;
ils contribuent la filtration des harmoniques de rang moyen
et lev ;
ils permettent, si ncessaire, les dphasages multiples de --- ;
6
ils facilitent les mises en parallle.
1.2.4 Convertisseurs tournants
Les convertisseurs tournants actuels sont toujours composs
dun moteur, le plus souvent asynchrone, parfois synchrone, et dun
gnrateur synchrone, lexclusion de machines plus complexes
telles que commutatrices, changeurs de frquence asynchrones ou
autres machines spciales.
Ceux-ci ne sont encore utiliss que dans quelques rares cas et,
notamment, lorsque le rseau est particulirement pollu et lorsque
les quipements utilisateurs sont extrmement sensibles cette
pollution. Un exemple typique est celui o la propulsion du navire
est pilote par cycloconvertisseurs. Dans ce cas, le rseau des auxiliaires du navire est classiquement aliment par un ou deux groupes
tournants de quelques dizaines ou centaines de kilowatts. On trouvera galement ce type dquipement pour alimenter les appareils
de mesure dans les navires de recherche ocanographiques.
D 5 620 4
1.2.5 Convertisseurs statiques
Cette solution se gnralisera terme aussi bien pour la
commande des moteurs de propulsion (association moteur-convertisseur) que pour la transformation haute tension/basse tension ou
basse tension/basse tension des rseaux.
1.2.6 lectrification des auxiliaires
Le concept du navire tout lectrique concerne galement llectrification des auxiliaires, savoir le remplacement des actionneurs
pneumatiques et hydrauliques par des actionneurs lectriques.
Cette volution devra permettre dutiliser toutes les possibilits de
llectricit et surtout de supprimer les installations de production
pneumatique et hydraulique, do une conomie financire et une
rduction de poids et de volume des installations du navire.
1.3 Architectures lectriques
1.3.1 Btiments de surface
Les architectures lectriques envisages portent soit sur une
volution des architectures prsentes en [D 5 610], ( 3), soit sur
celle tudie pour les navires de combat de type frgate (horizon 5
10 ans). Larchitecture pour ces navires est expose dans ce paragraphe, avec indication des schmas possibles.
1.3.1.1 Source primaire
La source primaire (figure 2) est constitue :
de deux ensembles turbine gaz + alternateur (A), dlivrant chacun une puissance de 7 22 MW, pour le fonctionnement
aux vitesses leves du navire et la charge du rseau de bord ;
dun ensemble diesel + alternateur ou turbine gaz +
alternateur (B), dlivrant une puissance de 2 7 MW, pour assurer
une vitesse du navire jusqu 16 nuds et la charge du rseau de
bord ;
de deux ensembles turbine gaz + alternateur (C) haute
vitesse (environs 23 000 tr/min), dlivrant une puissance jusqu
1,5 MW pour assurer une vitesse rduite du navire et la charge du
rseau de bord ainsi que la charge du rseau de bord lorsque le
navire est au mouillage.
1.3.1.2 Propulsion
La propulsion (figure 2), intgre dans la coque ou en nacelle,
comprend deux moteurs lectriques (ME) de propulsion aimants
permanents, dune puissance utile de 20 MW chacun 150 tr/min, et
aliment par un variateur de vitesse. Chaque moteur est accoupl
mcaniquement larbre dhlice du navire.
1.3.1.3 Rseau de bord
Le rseau de bord (figure 3) est aliment partir de la source
primaire. La distribution de llectricit est organise partir de
tableaux principaux (TP) interconnects en boucle.
Les consommateurs dune zone sont aliments partir de
tableaux secondaires (TS BT) eux-mmes aliments, partir des
deux tableaux principaux de la zone, par un systme normal/
secours et via un ensemble convertisseurs statiques (CVS).
La mise hors tension dun tableau principal provoque le basculement automatique des arrives des tableaux secondaires qui taient
alimentes par ce tableau sur lautre tableau principal.
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
____________________________________________________________________________________________________________ LE NAVIRE TOUT LECTRIQUE
C
A
B
1,5 MW
22 MW
22 MW
AT
1,5 MW
7 MW
AT
AT
AT
AT
Tableaux principaux haute tension
Tableaux principaux basse tension
~
~
20 MW
=
=
ME
20 MW
=
=
~
~
Alimentation du rseau de bord
ME
AT alternateur
ME moteur lectrique
Figure 2 Navire de combat, type frgate : source primaire et propulsion
Zone 1
TP1a
Zone 2
TP2a
Zone 3
TP3a
Zone 4
TP4a
TS BT
CVSHT/BT
2 x 400kVA
TP1b
TP2b
Bord avant
TP3b
TP4b
Bord arrire
TP tableaux principaux
TS tableaux secondaires
Figure 3 Navire de combat, type frgate : rseau de bord
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
D 5 620 5
LE NAVIRE TOUT LECTRIQUE
___________________________________________________________________________________________________________
Batteries
banc n 1
=
Convertisseur
multiphase MLI
n 1
phase
1
G1
Groupe alternateur-redresseur
n 1
DC
Moteur
multiphase
aimants
PM
Groupe alternateur-redresseur
n 2
G2
N /2 + 1
+
~
=
~
=
~
=
phase
N
Convertisseur
~
multiphase MLI
=
n 2
Batteries
banc n 2
gnrateur diesel
PM moteur de propulsion (moteur multiphas : ici phase
N
+ 1 = 5 ; phase N = 8)
2
Figure 4 Schma lectrique dun sous-marin conventionnel
1.3.2 Sous-marins
La figure 4 donne le schma lectrique dun sous-marin conventionnel, cest--dire non nuclaire ; il est driv dun projet de sousmarin conventionnel ralisable trs court terme.
Il comprend :
deux bancs de batteries (un par bord), qui peuvent tre utiliss
seuls, sparment, ou coupls en parallle par lintermdiaire du
disjoncteur de couplage DC ;
deux groupes diesel-alternateur-redresseurs identiques, dont
la principale fonction est de recharger les bancs de batterie ; leur
puissance est de quelques centaines de kilowatts et leur marche
nest, l encore, possible quen surface ou au schnorchel ;
les dparts vers le rseau de bord du navire, non reprsents ;
ils peuvent tre aliments partir de lun ou lautre groupe ou
batterie ;
le moteur de propulsion, multiphase et aimants permanents ;
un onduleur multiphase, en fait compos de hacheurs 4 quadrants.
On note, par rapport au schma classique (figure 8 en [D 5 610]),
la sensible rduction du nombre de contacteurs et la disparition des
combinateurs.
1.4 Propulsion magntohydrodynamique
1.4.1 Rappel thorique
Un lment conducteur de longueur dL, parcouru par un courant
I et plac dans un champ magntique dinduction B, est soumis
D 5 620 6
une force dF, normale au plan contenant B et I ; sa valeur, suivant la
loi lmentaire de Laplace, est :
dF = I dL B sin
tant langle de d L avec B .
Dautre part, si dL se dplace la vitesse V, il apparat, ses
bornes, une diffrence de potentiel E, telle que :
E = V dL B sin
Ces deux lois correspondent tout fait aux fonctionnements en
moteurs et en gnrateurs rversibles, de type homopolaires ,
comme la roue de Barlow .
La magntohydrodynamique, MHD , est lapplication de ces
lois aux fluides conducteurs.
Des recherches importantes ont t menes et soutenues par EDF,
dans les annes 1970, en vue de dvelopper une production directe
dlectricit partir de la dtente dun gaz conducteur chaud
(2 000 C) (filire plasma froid ).
La MHD, qui nous intresse ici, est lapplication de ces formules
(figure 5), dans un liquide conducteur, parcouru par un courant et
soumis un champ magntique. Les fluides concerns sont, entre
autres, les mtaux liquides, les lectrolytes ou les gaz ioniss. Pour
la propulsion des navires, il sagit essentiellement de leau de mer.
Les champs magntiques peuvent tre produits par des
aimants, des inductances normales ou des bobines supraconductrices. Les champs appliqus peuvent tre continus, alternatifs tournants ou glissants :
dans le cas des champs tournants, les inductances sont parcourues par des courants alternatifs polyphass, lesquels induisent,
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
____________________________________________________________________________________________________________ LE NAVIRE TOUT LECTRIQUE
Conduit
V
Ib
F
I
Ib
Bobinages inducteurs
lectrodes
Ib courant dans les bobinages inducteurs
coulement
Figure 5 Principe de la MHD conduction
Figure 6 Propulseur MHD conduction de type canal
dans le liquide, des courants et des forces selon le mme processus
que dans les moteurs asynchrones ;
le cas des champs glissants correspond la version
linaire des moteurs asynchrones.
Les premires tudes de propulsion MHD remontent aux annes
1960. Les performances taient mdiocres, du fait des trop faibles
inductions obtenues par des aimants ou des lectroaimants classiques et des limites apportes par la conductivit de leau de mer.
inductions : 1 2 T
rsistivit des eaux de mer :
ocan Atlantique : 0,25 .m
mer Rouge :
0,15 .m
mer Baltique :
1,2 .m
Dans lindustrie, lapplication la plus connue est celle des
brasseurs de lingotires. Il sagit de provoquer des mouvements
adquats dans lacier en fusion, au cur du lingot, pour mieux
homogniser la matire et les tempratures. La frquence est limite quelques hertz pour que le champ pntre convenablement
dans le mtal.
Considrons un lment de volume (figure 7) :
d9 = , L H
1.4.2 Propulsion des navires
On distingue en MHD quatre familles :
le systme conduction de type canal ; pour ce systme, le
champ magntique et le courant sont continus et le liquide scoule
dans un canal ou tuyre ;
le systme conduction de type extrieur ; le principe est le
mme que pour le systme prcdent, mais laction sexerce sur
leau de mer, lextrieur, le long de la coque du navire ;
le systme induction de type canal ; le champ magntique
est glissant et le liquide scoule dans un canal ;
le systme induction de type extrieur.
soumis une induction B, et pour lequel le rapport entre la force lectromotrice dinduction e et la chute ohmique r I dans le liquide est :
rI
k = ----e
,
avec r = -------- .
LH
B (T)
Les systmes agissants lextrieur engendrent un flux de fuite
gnant, voire inacceptable, en particulier pour des navires militaires. En effet, si la discrtion acoustique obtenue est trs recherche pour certains btiments, la signature magntique risquerait
dtre rdhibitoire. Seules les applications en canal paraissent
convenablement appropries la propulsion des navires.
Le principe champ et courant continus prsente toutefois
linconvnient de ncessiter une source dalimentation du courant
ainsi que des lectrodes, et cre un effet parasite dlectrolyse avec
production de bulles (H2, O2, Cl2).
La figure 6, montre le principe dun propulseur MHD conduction
type canal , le champ tant produit par des bobines. Le systme
est raction , cest--dire que le liquide est pouss vers larrire
et traverse le canal une vitesse suprieure celle du navire.
Les systmes induction prsentent lavantage de ne ncessiter quune source de courant alternatif, sans lectrode, et nengendrent pas de phnomne dlectrolyse. La frquence et le pas
polaire doivent tre bien adapts la vitesse du fluide. Il faut, pour
les applications grande discrtion acoustique, se mfier des bruits
engendrs par les courants basse frquence.
F (N)
V (m/s)
F = BI,
e=urI
Figure 7 lment de volume dune propulsion MHD
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
D 5 620 7
LE NAVIRE TOUT LECTRIQUE
___________________________________________________________________________________________________________
Cet lment produit, dans une eau de rsistivit (.m), et dont la
vitesse relative dans le canal est V (m/s), une pousse denviron :
2
VB k
d F (N) = -------------- d9
Exemple : 10 m/s, sous 1,6 T, avec k = 1, et = 0,25 .m
dF
-------- 100 N/m3.
d9
Pour k = 1, la chute ohmique r I est gale 50 % de la tension
totale applique llment liquide, ce qui correspond un rendement sensiblement infrieur 0,5, si on compte toutes les autres
pertes (coulement, alimentations, lectrolyse, etc.).
Il faut donc, pour parvenir des performances acceptables,
augmenter, si possible, la vitesse de lcoulement dans le canal, et,
surtout augmenter trs sensiblement linduction.
Cela ne peut sobtenir que par lutilisation de bobines supraconductrices seules capables datteindre des inductions trs suprieures aux valeurs maximales de saturation des matriaux. Les
recherches actuelles portent sur des inductions de lordre de 10 T, et
des vitesses de lordre de 15 m/s. Le rsultat de la prcdente quation devient :
F 6 000 N/m3.
Cependant, on ne connat, ce jour, que des expriences 5 T et,
par ailleurs, des vitesses trop suprieures 10 m/s risquent de crer
des difficults et surtout des pertes excessives.
Pour viter les flux de fuite, on dispose principalement de deux
techniques :
des structures en tore , comme celle reprsente sur la
figure 8, structure la mieux adapte pour rpondre ce problme ;
lutilisation dcrans en matriau magntique trs permable,
pour les systmes conduction (champ magntique continu), ou,
ventuellement, en matriau conducteur (champ alternatif), pour
les systmes induction.
Une troisime technique, mentionne dans les recherches,
consisterait crer des crans actifs , laide de bobines supplmentaires parcourues par des courants asservis, dans le but dannuler le champ lextrieur.
Les trois pays les plus actifs dans la recherche sont le Japon, les
tats-Unis et la Russie.
Le premier prototype de navire de surface est, pour le Japon, le
Yamato-1, inaugur en juin 92 et dont les caractristiques sont :
longueur :
30 m ;
largeur :
10 m ;
dplacement 185 t vide ;
280 t en charge ;
vitesse :
8 nuds (2 propulseurs).
Ces propulseurs sont constitus de plusieurs tuyres lectroaimant supraconducteur :
induction :
4T;
volume suppos des tuyres : 12 m3 ;
pousse totale :
16 000 N ;
courant sous lectrode :
2 000 A (150 V).
Les tats-Unis se sont limits des ralisations exprimentales
de boucles eau de mer relle : NUWC (Naval Underwater
Warefare Center) New Port et ANL (Argonne National Laboratory)
Chicago. Ces moyens dessais correspondent des canaux MHD
section rectangulaire placs dans des aimants supraconducteurs
dipolaires. Cette gomtrie constitue une bonne approche de la
gomtrie annulaire, actuellement en faveur dans la recherche aux
tats-Unis et en France.
Les objectifs fixs sont dobtenir un rendement global (puissance
utile sur puissance lectrique) suprieur 50 % et des champs
magntiques compris entre 8 et 10 T.
En Russie, les travaux portent sur une gomtrie solnodale
hlicode . Laimant est un solnode qui gnre un champ magntique axial. Lcoulement est rendu hlicodal par des parois appropries, afin de prsenter une vitesse tangentielle au flux.
Lavantage est sans doute la facilit dexcution du bobinage et de
lcran.
Pour des raisons videntes de discrtion acoustique, la
recherche militaire porte principalement sur les sous-marins.
La solution la plus examine consiste en un cylindre extrieur
de type conduction, dans lesprit de la figure 8, compos dun
grand nombre daimants supraconducteurs et de canaux, disposition qui engendre le minimum de flux de fuite.
Des tudes rcentes montrent que lon peut obtenir 10 T des
rendements globaux de 50 % 15 m/s. Cependant, les masses
embarques supplmentaires (propulseurs, alimentations et
cryognie) sont trs importantes, elles atteignent 10 20 % de
la masse du btiment.
La propulsion navale MHD reste donc encore du domaine de
la recherche technologique.
Les espoirs en ce domaine se portent essentiellement sur
lavnement de supraconducteurs chauds trs haute capacit magntique.
2. Systmes de conduite
2.1 Introduction
lectrodes
Aimants
supraconducteurs
NS
NS
N
S
On attend dune propulsion et de ses composants quils offrent la
meilleure disponibilit possible. Cest le cas des systmes de
conduite, dont la maturit est base sur une efficacit et une convivialit constamment amliores au cours des vingt dernires
annes.
Pour cela, le retour dexprience des utilisateurs a t essentiel
pour mettre en pratique les principes de conduite optimiss en
vigueur sur les systmes de propulsion actuels.
S
N
N
S
coulements
S
N
SN
SN
Figure 8 Exemple de structure en tore pour le systme MHD
conduction de type canal
D 5 620 8
2.2 Principes de fonctionnement
2.2.1 Gnralits
Comme vu en [D 5 610], ( 3), un systme de propulsion lectrique est constitu de deux sous-systmes principaux :
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
____________________________________________________________________________________________________________ LE NAVIRE TOUT LECTRIQUE
une centrale dnergie qui comprend un certain nombre de
gnrateurs, entrans par des moteurs diesel (ou des turbines
gaz), leur nombre dpendant de la puissance totale fournir et du
profil oprationnel du navire ;
la propulsion qui comprend un ou plusieurs moteurs lectriques vitesse variable associs des convertisseurs de frquence.
Un des atouts essentiels dun tel systme, qui a une grande
influence sur le fonctionnement, est la redondance.
Au niveau de la centrale dnergie : une panne sur nimporte
lequel des groupes lectrognes na comme effet quune rduction
limite de la puissance propulsive ; cest loin dtre le cas quand le
moteur principal dune propulsion mcanique est hors service, ce
qui entrane larrt complet du bateau ou, si le systme est deux
lignes darbres, la perte de lune dentre elles.
Au niveau du systme de propulsion, par lusage de moteurs
multienroulements : les moteurs sont alors constitus de plusieurs
parties lectriques indpendantes, alimentes par plusieurs convertisseurs spars. Un dfaut sur un des enroulements ou sur son alimentation permet encore un fonctionnement avec un couple
important lhlice (plus de 50 % de couple disponible lhlice
dans le cas frquent o le moteur est double enroulement).
Pour tirer pleinement profit de cet atout, ainsi que des nombreux
avantages de la propulsion lectrique, le systme de conduite doit
tre conu selon un certain nombre de rgles, les deux principales
tant :
le systme de propulsion doit tre simple utiliser ;
le systme de propulsion doit tre extrmement fiable ; de
plus, si quelque chose arrive, il doit y avoir suffisamment de redondance pour conserver le navire en scurit.
bord, soit parfois dissipe dans des rsistances. Le couple de freinage appliqu, contrl de faon continue et prcise par le courant,
est augment jusqu une valeur limite, de manire diminuer la
vitesse de rotation de lhlice en vitant la cavitation.
3) Leffet de freinage se prolonge et, sans augmentation du
couple, la vitesse de rotation de lhlice dcrot jusqu sannuler.
Phase de contre-motorisation : elle a lieu aprs que le bateau
ait t dclr suffisamment, avec lhlice tournant en sens
inverse. Le moteur de propulsion fonctionne de nouveau en moteur,
la puissance tant fournie par les groupes lectrognes.
2.2.2.2 Systmes de gestion de lnergie et de gestion
de la propulsion
Comme dj vu, un systme tout lectrique consiste en :
une centrale dnergie qui comprend plusieurs gnrateurs
fournissant la puissance lectrique pour lensemble du navire ;
plusieurs consommateurs, y compris la propulsion, dont le
niveau de puissance est de trs loin le plus lev.
Linteraction entre ces deux lments justifie la ncessit des
deux systmes suivants, tels que dcrits figure 9.
Le systme de gestion de lnergie (SGE), partie intgrante
du systme dautomatismes du bateau, gre la centrale dnergie.
Son rle est de dmarrer/arrter automatiquement les groupes,
de manire ajuster strictement le nombre de groupes connects
au rseau la puissance fournir. Il assure galement, si ncessaire, le dlestage des utilisateurs non essentiels.
Le systme de gestion de la propulsion (SGP), partie intgrante du systme du contrle de la propulsion, prend soin de la
compatibilit entre le systme de propulsion et la centrale dnergie.
2.2.2 Simplicit du systme de propulsion
2.2.2.1 Modes de fonctionnement dun navire lectrique
Ces modes sont le fonctionnement normal et le fonctionnement
en arrt durgence.
Fonctionnement normal
Comme pour une propulsion mcanique, une propulsion lectrique a trois tats correspondant aux termes traditionnels :
termin pour la machine ;
propulsion prte (auxiliaires en service) ;
propulsion en service .
Le dmarrage de la propulsion se fait simplement :
soit automatiquement par un signal venant du systme de
positionnement dynamique ;
soit en appuyant sur le bouton mise en service propulsion ,
ce qui ferme les disjoncteurs de la propulsion et rend la propulsion
prte, condition que les leviers de tlcommande soient en position 0 tr/min. Les leviers peuvent alors tres actionns pour positionner la rfrence de la vitesse dsire.
Fonctionnement en arrt durgence (en crash-stop )
Une opration darrt durgence avec une propulsion lectrique
se caractrise par sa douceur et son efficacit ; elle est simplement
obtenue en mettant le levier en position arrire toute . Lopration, entirement automatique, peut tre divise en deux phases
pour une hlice pales fixes :
une phase de dclration ;
une phase de contre-motorisation.
Phase de dclration : pendant cette phase, lhlice tourne
encore dans le sens positif.
1) Le couple du moteur de propulsion est supprim et la vitesse
de lhlice dcrot rapidement jusqu la vitesse couple nul.
2) Le moteur de propulsion fonctionne en gnrateur lectrique,
ce qui freine lhlice. La puissance gnre par le moteur de propulsion est, suivant le type de convertisseur, soit renvoye au rseau de
Automatismes
du navire
Tlcommande
Capteurs
Automate
programmable
Systme
de gestion
de l'nergie
Systme
de gestion
de propulsion
Rgulation
numrique
Convertisseur
statique
de frquence
Moteur
diesel
Moteur
diesel
Moteur
diesel
Alternateur Alternateur Alternateur
Moteur
lectrique
de propulsion
Tableau principal
Figure 9 Schma de principe des systmes de gestion de lnergie
(SGE) et de gestion de la propulsion (SGP)
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
D 5 620 9
LE NAVIRE TOUT LECTRIQUE
___________________________________________________________________________________________________________
Comme le systme de propulsion est de loin le consommateur le
plus important bord, il doit tre capable de sautolimiter si la
centrale nest pas capable de fournir la puissance ncessaire. Par
consquent, son but est de limiter les puissances active et ractive
fournies par les gnrateurs et la puissance rgnre pendant le
freinage.
Grce ces deux systmes, et au fait que le concept de centrale unique est un systme puissant, le bateau lectrique est
sans interruption de lalimentation (sans black-out ).
De plus, aucune dconnexion/reconnexion de tableaux de
distribution nest ncessaire au moment de lutilisation des propulseurs latraux.
2.2.3 Fiabilit du systme de propulsion. Aptitude
la redondance en cas dincident
Ce paragraphe aborde la manire dont le systme de conduite
ragit en cas de dfaut, et comment lquipage lui-mme doit ragir.
Compte tenu de lexprience actuelle, les ractions un dfaut ou
un problme sont regroupes en quatre grands dlais de raction : secondes, minutes, heures, jours.
Secondes
Les secondes qui suivent un dfaut sont les plus critiques, car la
raction doit tre rapide et sre.
Ainsi, pour maintenir le bateau en fonctionnement scuris, et
pour laisser le temps lquipage didentifier le dfaut, le systme
doit tre conu pour grer les premires oprations durgence par
lui-mme, sans action de loprateur.
Cela signifie que le systme doit automatiquement se positionner
en mode dgrad, en mettant disposition de la propulsion la puissance maximale possible.
Exemple : les moteurs de propulsion sont classiquement des
moteurs double enroulement, constitus de deux parties lectriques
indpendantes aliments par deux circuits spars (convertisseurs et
transformateurs).
Si un dfaut se produit sur nimporte lequel des quipements du circuit (transformateur, disjoncteur, convertisseur ou cble), le systme
de protection place automatiquement la propulsion en mode demimoteur ; ainsi, plus de 50 % du couple reste encore disponible sur
lhlice, ce qui suffit pour conserver environ 70 % de la vitesse maximale.
Ce type de protection automatique aide efficacement lquipage
affronter le problme sans panique.
Dans le pass, la plupart des accidents ont t causs par des
erreurs humaines et, principalement, par des actions mal excutes
dans la panique ou sans avoir assez dinformations concernant la
situation du matriel ; le but est dliminer ce risque et de laisser les
systmes lectroniques raliser les premires oprations durgence.
D 5 620 10
Il est prvu que certaines limitations puissent tre annules
quand lquipage se retrouve requis une situation durgence. Dans
lexemple prcdent, si le maximum de puissance est requis pour la
propulsion, une commande spciale munie des protections daccs
appropries permet dinhiber la protection automatique.
Minutes
Quand la protection a agi et a t signale lquipage, les causes
du dfaut doivent tre identifies et corriges.
Le systme de conduite comprend donc une centrale dalarme
permettant de localiser prcisment le dfaut. Le plus souvent, le
remplacement de la pice dfectueuse se fait alors sur place.
Dans le cas o, mme avec le systme de supervision et laffichage local, la faute nest pas compltement identifie ou si une
analyse approfondie est ncessaire, une documentation du type
AMPE (analyse des modes de panne et de leurs effets ; en anglais
FMEA Failure Modes and Effects Analysis) peut tre utilise ; elle
donne :
1 le type de dfaut (tel que cod sur laffichage local) ;
2 le libell du dfaut ;
3 la localisation du dfaut ;
4 une procdure de test ;
5 les causes possibles ;
6 les procdures de dpannage.
Dans le cas o, mme avec le systme de supervision, laffichage local et AMPE, le dfaut nest pas encore compltement identifi ou si une analyse complmentaire est ncessaire, les
dmarches suivantes peuvent tre entreprises.
Heures
Le systme de propulsion peut tre quip dun systme de tldiagnostic. Ce systme permettra, via un modem, une communication entre un ordinateur de type PC install en salle de contrle des
machines et un ordinateur install dans les bureaux du fournisseur
du systme de propulsion.
Grce ce systme, le problme sera rsolu distance par un
expert, savoir : lorsque, suite lapparition dune alarme, lorigine
de celle-ci ne peut pas tre identifie facilement, une investigation
plus approfondie peut tre excute. En effet, lorigine du dfaut
peut tre localise par des enregistrements successifs, gnraux
dabord, plus spcifiques ensuite. Le choix des signaux enregistrer
et de lvnement dclencheur et la place de cet vnement dans
lenregistrement peuvent tre raliss par programmation
distance.
ce stade de diagnostic, on peut considrer que 99 % des dfauts
sont identifis et peuvent tre rsolus.
Jours
Sil sagit dune panne srieuse exigeant une intervention extrieure au bord, cest--dire au navire, la propulsion est conue pour
conserver le maximum de puissance possible lhlice. Donc, quel
que soit le dfaut, la propulsion permet au bateau de rentrer au port
en toute scurit.
Toute reproduction sans autorisation du Centre franais dexploitation du droit de copie est strictement interdite.
Techniques de lIngnieur, trait Gnie lectrique
You might also like
- PALIERS SNV P1320-P1449-Corps de Palier PDFDocument130 pagesPALIERS SNV P1320-P1449-Corps de Palier PDFمحمدلمينابراهيمالموريتانيNo ratings yet
- Conduction Électrique Dans Les Liquides: Robert TOBAZÉONDocument27 pagesConduction Électrique Dans Les Liquides: Robert TOBAZÉONمحمدلمينابراهيمالموريتاني100% (1)
- Post-Traitements À La Filtration: Gérard BALUAISDocument12 pagesPost-Traitements À La Filtration: Gérard BALUAISمحمدلمينابراهيمالموريتانيNo ratings yet
- BM4500Document36 pagesBM4500محمدلمينابراهيمالموريتانيNo ratings yet
- BE9272Document22 pagesBE9272محمدلمينابراهيمالموريتانيNo ratings yet
- D3775Document29 pagesD3775محمدلمينابراهيمالموريتانيNo ratings yet
- B3835Document22 pagesB3835محمدلمينابراهيمالموريتانيNo ratings yet
- E4100Document8 pagesE4100محمدلمينابراهيمالموريتانيNo ratings yet
- BM7251DOCDocument2 pagesBM7251DOCمحمدلمينابراهيمالموريتانيNo ratings yet
- AM3513DOCDocument19 pagesAM3513DOCمحمدلمينابراهيمالموريتانيNo ratings yet
- BN3652Document9 pagesBN3652محمدلمينابراهيمالموريتانيNo ratings yet
- Échange de Données Informatisé (EDI) : Claude ChiaramontiDocument19 pagesÉchange de Données Informatisé (EDI) : Claude ChiaramontiمحمدلمينابراهيمالموريتانيNo ratings yet
- Fonderie Et Moulage Du Titane Et Des Alliages de Titane: Georges BROIHANNEDocument12 pagesFonderie Et Moulage Du Titane Et Des Alliages de Titane: Georges BROIHANNEمحمدلمينابراهيمالموريتانيNo ratings yet
- BM7272Document12 pagesBM7272محمدلمينابراهيمالموريتانيNo ratings yet
- Chromage: Patrick BENABENDocument32 pagesChromage: Patrick BENABENمحمدلمينابراهيمالموريتاني100% (1)
- R7545Document13 pagesR7545محمدلمينابراهيمالموريتانيNo ratings yet
- E4100Document8 pagesE4100محمدلمينابراهيمالموريتانيNo ratings yet
- D1175DOCDocument2 pagesD1175DOCمحمدلمينابراهيمالموريتانيNo ratings yet
- A1080Document20 pagesA1080محمدلمينابراهيمالموريتانيNo ratings yet
- R1384DOCDocument1 pageR1384DOCمحمدلمينابراهيمالموريتانيNo ratings yet
- M140Document14 pagesM140محمدلمينابراهيمالموريتاني100% (1)
- BE9341Document13 pagesBE9341محمدلمينابراهيمالموريتانيNo ratings yet
- B2960Document27 pagesB2960محمدلمينابراهيمالموريتانيNo ratings yet
- B5435Document35 pagesB5435محمدلمينابراهيمالموريتانيNo ratings yet
- E5155Document21 pagesE5155محمدلمينابراهيمالموريتانيNo ratings yet
- B2385Document5 pagesB2385محمدلمينابراهيمالموريتانيNo ratings yet
- AF3571Document14 pagesAF3571محمدلمينابراهيمالموريتانيNo ratings yet
- B3835Document22 pagesB3835محمدلمينابراهيمالموريتانيNo ratings yet
- BE9022Document9 pagesBE9022محمدلمينابراهيمالموريتانيNo ratings yet
- Ele3300 Ef A00 QSDocument15 pagesEle3300 Ef A00 QSabdoNo ratings yet
- Etudes Des Contingences Des Reseaux de DDocument80 pagesEtudes Des Contingences Des Reseaux de Dzkd77No ratings yet
- Cours Chapitre3 PDFDocument13 pagesCours Chapitre3 PDFIkbel HahaNo ratings yet
- Tests de Diagnostic Et Surveillance Des Transformateurs de PuissanceDocument40 pagesTests de Diagnostic Et Surveillance Des Transformateurs de PuissanceadamNo ratings yet
- MCCDocument3 pagesMCCNoureddine LaraNo ratings yet
- E2h Ip1967frDocument36 pagesE2h Ip1967frMed BazNo ratings yet
- TP2Document10 pagesTP2Citation Du JourNo ratings yet
- Propriétés Electriques PDFDocument60 pagesPropriétés Electriques PDFDieuveille DANGUINo ratings yet
- Michel Cyrot Et Al. - Magnétisme, Numéro 1 - Fondements. I-EDP Sciences (2000)Document498 pagesMichel Cyrot Et Al. - Magnétisme, Numéro 1 - Fondements. I-EDP Sciences (2000)walid dirahoui100% (1)
- Catalogue D-Power MarocDocument62 pagesCatalogue D-Power MarocAnass Anass AnassNo ratings yet
- Bac F1Document2 pagesBac F1Haman Bello OumarouNo ratings yet
- Formulaire D Electrotechnique 09-03-16Document29 pagesFormulaire D Electrotechnique 09-03-16yacoub ingNo ratings yet
- 2 Chapitre 1Document12 pages2 Chapitre 1salah a9aNo ratings yet
- Liste Des Composants ElectroniqueDocument2 pagesListe Des Composants ElectroniqueYOUNESS ATIFINo ratings yet
- Guia Del Soldador PDFDocument40 pagesGuia Del Soldador PDFDave Montúfar DíazNo ratings yet
- Résumé RLC ForcéDocument5 pagesRésumé RLC ForcéBilel Ameur100% (3)
- Chapitre 1 EFDocument33 pagesChapitre 1 EFst.a.barkat.222231663404No ratings yet
- Conditionnement Du Signal Unité ATC 1STE Bouchaib MAHBAB PDFDocument10 pagesConditionnement Du Signal Unité ATC 1STE Bouchaib MAHBAB PDFELmokhtar HamrouniNo ratings yet
- 2 TD - Conducteurs-SolDocument4 pages2 TD - Conducteurs-SolWahiba AbdounNo ratings yet
- Dossier Energies RenouvelablesDocument5 pagesDossier Energies RenouvelablesskitocNo ratings yet
- Conception Et Réalisation Dune Maquette ÉlectroniqueDocument7 pagesConception Et Réalisation Dune Maquette ÉlectroniqueLukombo AfonsoNo ratings yet
- Rapporte de Stage Tunisie Telecom AyariDocument41 pagesRapporte de Stage Tunisie Telecom AyariSouha RiguenNo ratings yet
- Polycope Travaux Pratiques MIC19Document22 pagesPolycope Travaux Pratiques MIC19Rottina RossyNo ratings yet
- Chapitre 4 - Polarisation TransistorsDocument22 pagesChapitre 4 - Polarisation TransistorsChakib BenmhamedNo ratings yet
- Sur Chaque Impédance Retrouvez Ce Comportement.: Exercice 1Document2 pagesSur Chaque Impédance Retrouvez Ce Comportement.: Exercice 1Mossafir Mossafir100% (1)
- La Généralité Sur La Compensation de Puissance RéactiveDocument24 pagesLa Généralité Sur La Compensation de Puissance RéactiveChakib ZendaguiNo ratings yet
- ELT-FLY-BT-CC-003 v1-01Document42 pagesELT-FLY-BT-CC-003 v1-01BelaliaNo ratings yet
- Rapport de Stage de Fin D'etude SolaimaneDocument18 pagesRapport de Stage de Fin D'etude SolaimaneAbdelilah El Gabari100% (1)
- TP3 2020Document4 pagesTP3 2020adel bouakazNo ratings yet
- Ett0301 - TPDocument45 pagesEtt0301 - TPMohamed Amine100% (1)