You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Upload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowDocument4 pagesUpload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowIam AbhisekNo ratings yet
- Fuzzy Logic Examples Using Matlab PDFDocument7 pagesFuzzy Logic Examples Using Matlab PDFCarlos MuñizNo ratings yet
- Low None None None Right NoneDocument1 pageLow None None None Right NoneIam AbhisekNo ratings yet
- FullText AisDocument108 pagesFullText AisIam AbhisekNo ratings yet
- Upload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowDocument4 pagesUpload A Document For Free Download Access.: Select Files From Your Computer or Choose Other Ways To Upload BelowIam AbhisekNo ratings yet
- 2Evwdfoh'Hwhfwlrq: 7khuhduhsurgxfwvDocument3 pages2Evwdfoh'Hwhfwlrq: 7khuhduhsurgxfwvIam AbhisekNo ratings yet
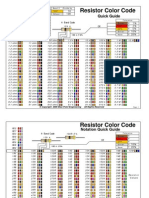
- Resistencias Codigo Colores PDFDocument2 pagesResistencias Codigo Colores PDF'Cesar Guel81% (16)
- Mod1 Mechatronics and Manufacturing Automation PDFDocument17 pagesMod1 Mechatronics and Manufacturing Automation PDFthebetterman0511No ratings yet
- NF7907150273880Document1 pageNF7907150273880Iam AbhisekNo ratings yet
- 973 FullDocument14 pages973 FullIam AbhisekNo ratings yet
- 1 Finite Element Analysis MethodsDocument14 pages1 Finite Element Analysis MethodsVarun KumarNo ratings yet
- HWsol 12Document5 pagesHWsol 12Iam AbhisekNo ratings yet
- ZenerDocument22 pagesZenersheikhusama91No ratings yet
- Nokia Company Head Office: International Remittance Dept United KingdomDocument1 pageNokia Company Head Office: International Remittance Dept United KingdomIam AbhisekNo ratings yet
- IPO Preliminary ResultDocument8 pagesIPO Preliminary ResultIam AbhisekNo ratings yet
- Current Passport First Last PageDocument2 pagesCurrent Passport First Last PageIam AbhisekNo ratings yet
- Cocubes - Id User - Id Password CollegerollnumberDocument12 pagesCocubes - Id User - Id Password CollegerollnumberIam AbhisekNo ratings yet
- Hyundai India Interview Call Letter PDFDocument2 pagesHyundai India Interview Call Letter PDFIam Abhisek0% (1)
- 2980 82Document10 pages2980 82Iam AbhisekNo ratings yet
- 12 Weeks Post Graduate Certificate Course in Thermal Power Plant EngineeringDocument5 pages12 Weeks Post Graduate Certificate Course in Thermal Power Plant EngineeringArun KumarNo ratings yet
- Application Form 2013 PDFDocument3 pagesApplication Form 2013 PDFIam AbhisekNo ratings yet
- Academic Calender B-Tech 2012-13Document2 pagesAcademic Calender B-Tech 2012-13Iam AbhisekNo ratings yet
- 2012 Solution KeyDocument1 page2012 Solution KeyDevendra TalekarNo ratings yet
- BlcvindiaDocument3 pagesBlcvindiaJepil M PhilipNo ratings yet
- VirusDocument13 pagesVirusapi-19937584No ratings yet
- STC 2013 14Document2 pagesSTC 2013 14Iam AbhisekNo ratings yet
- Hyundai Motor IndiaDocument3 pagesHyundai Motor IndiaIam AbhisekNo ratings yet
- Voice Over Internet ProtocolDocument23 pagesVoice Over Internet Protocolkarthiksrinivas100% (3)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Industrial Control Systems - 01 IntroductionDocument5 pagesIndustrial Control Systems - 01 IntroductionBehzad SamadiNo ratings yet
- Real-Time Systems: June 2012Document81 pagesReal-Time Systems: June 2012Kusuma P ChandrashekharNo ratings yet
- Introduction To MechatronicsDocument46 pagesIntroduction To MechatronicsChristian Breth Burgos100% (2)
- Soft Starters For Induction MotorsDocument9 pagesSoft Starters For Induction MotorsDũng DungNo ratings yet
- Robotics SyllabusDocument52 pagesRobotics SyllabusManoj Kumar100% (1)
- Slides Workshop Finn HaugenDocument63 pagesSlides Workshop Finn HaugenIbrahimDewaliNo ratings yet
- Micropr NotesDocument119 pagesMicropr NotesYasyrNo ratings yet
- Siemens G150 PDFDocument240 pagesSiemens G150 PDFnitin hadkeNo ratings yet
- RGPV Syllabus Btech Ee 5 Sem All SubjectsDocument17 pagesRGPV Syllabus Btech Ee 5 Sem All SubjectsSandeep TaleNo ratings yet
- Instrumentos PDFDocument24 pagesInstrumentos PDFinstrumentacion.hsrNo ratings yet
- Katalog Plt111 1999 enDocument90 pagesKatalog Plt111 1999 enbajricaNo ratings yet
- Pre and Post CompensationDocument10 pagesPre and Post CompensationRitesh SinghNo ratings yet
- Design Methodology of A Passive Damped Modified LCL Filter For Leakage Current Reduction in Grid-Connected Transformerless Three-Phase PV InvertersDocument9 pagesDesign Methodology of A Passive Damped Modified LCL Filter For Leakage Current Reduction in Grid-Connected Transformerless Three-Phase PV InvertersDadoNo ratings yet
- Small Signal Modeling of Inverter-Based Grid-Connected Microgrid To Determine The Zero-Pole Drift Control With Dynamic Power Sharing Controller PDFDocument7 pagesSmall Signal Modeling of Inverter-Based Grid-Connected Microgrid To Determine The Zero-Pole Drift Control With Dynamic Power Sharing Controller PDFGeovannyNo ratings yet
- Dolinsky ThesisDocument183 pagesDolinsky Thesisvelo123No ratings yet
- The Quadruple-Tank Process - JohanssonDocument24 pagesThe Quadruple-Tank Process - JohanssonosmaanNo ratings yet
- BE Electrical 2019 SyllabusDocument78 pagesBE Electrical 2019 SyllabusRohit KumarNo ratings yet
- 1) What Are The Four Functions Included Within The Scope of Manufacturing Support Systems?Document4 pages1) What Are The Four Functions Included Within The Scope of Manufacturing Support Systems?Muhamad RadhziNo ratings yet
- Elec9732-Hw2 2021Document1 pageElec9732-Hw2 2021Muhammed IrfanNo ratings yet
- Happy DocumentsDocument22 pagesHappy DocumentsthunderbladeNo ratings yet
- Sliding Mode Control of An Inverted PendulumDocument5 pagesSliding Mode Control of An Inverted Pendulumkarim belaliaNo ratings yet
- Festo Process Control - CatalogDocument3 pagesFesto Process Control - Cataloglue-ookNo ratings yet
- 0 7 Lec7 EE418 Routh - Herwitz - Stability - CriterionDocument58 pages0 7 Lec7 EE418 Routh - Herwitz - Stability - Criterionyoussef hossamNo ratings yet
- Chapter03.Modeling in The Time DomainDocument25 pagesChapter03.Modeling in The Time Domainehddn09990% (1)
- Control Engineering Is Based On The Foundations of Feedback Theory and Linear System Analysis, and It GeneratesDocument38 pagesControl Engineering Is Based On The Foundations of Feedback Theory and Linear System Analysis, and It GeneratesRajeev ValunjkarNo ratings yet
- Quanser Lab Model IdentDocument8 pagesQuanser Lab Model IdentDaniela Florina LucaNo ratings yet
- Fundamentals of Digital Signal ProcessingDocument26 pagesFundamentals of Digital Signal ProcessingNini LashariNo ratings yet
- STEP7 PID Self Tuner PDFDocument50 pagesSTEP7 PID Self Tuner PDFHamed YazidiNo ratings yet