You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- TESTRANO 600 User Manual ENU PDFDocument277 pagesTESTRANO 600 User Manual ENU PDFBala Krishnan100% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Toshiba DVR dr430 Owners Manual 128979 PDFDocument103 pagesToshiba DVR dr430 Owners Manual 128979 PDFRosanaFonsecaNo ratings yet
- L3 RF Troubleshooting Guide XT1650-01-XT1650-02-XT1650-03-XT1650-05 V1.0.pdf MOTO Z PDFDocument298 pagesL3 RF Troubleshooting Guide XT1650-01-XT1650-02-XT1650-03-XT1650-05 V1.0.pdf MOTO Z PDFesdiguenNo ratings yet
- Articolo SWR EngDocument4 pagesArticolo SWR EngLuis Enrique Castillejo GonzalesNo ratings yet
- 12 Com123n TXDocument7 pages12 Com123n TXCauVong JustinNo ratings yet
- Gps4848 AcfDocument25 pagesGps4848 Acftimmylau230% (1)
- MPMC MID 1 2020Document1 pageMPMC MID 1 2020Virang PatelNo ratings yet
- Part I ADocument206 pagesPart I AsenthilkumaranvNo ratings yet
- EP Dyna EnergeticsDocument2 pagesEP Dyna Energeticssmithyry2014No ratings yet
- Nortel proprietary handling instructionsDocument38 pagesNortel proprietary handling instructionsjose de la rivaNo ratings yet
- Cambridge IGCSE™: Computer Science 0478/11 October/November 2020Document11 pagesCambridge IGCSE™: Computer Science 0478/11 October/November 2020Zaha NaseerNo ratings yet
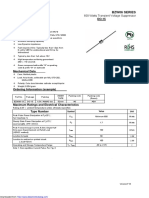
- 600W Transient Voltage Suppressor Technical SpecificationDocument7 pages600W Transient Voltage Suppressor Technical SpecificationNguyễn Văn TrungNo ratings yet
- Lab MicroDocument5 pagesLab MicroNashitah AlwazNo ratings yet
- MP3 Trigger Onboard Chip DatasheetDocument82 pagesMP3 Trigger Onboard Chip DatasheetQuinn BastNo ratings yet
- L7 Users ManualDocument241 pagesL7 Users ManualJunior CardosoNo ratings yet
- Exa Schedual For Ksou - BDocument7 pagesExa Schedual For Ksou - BAnil KumarNo ratings yet
- FAQ RegistrationDocument22 pagesFAQ RegistrationSyed MisbahuddinNo ratings yet
- VSD ComponentsDocument20 pagesVSD ComponentsTanya Singh75% (4)
- Project Report Capacitive Proximity Sensor Using ArduinoDocument10 pagesProject Report Capacitive Proximity Sensor Using ArduinoShankha BagchiNo ratings yet
- Text Books:: 3 G.T.Heydt, "Electric Power Quality", Stars in A Circle Publications, 1994Document1 pageText Books:: 3 G.T.Heydt, "Electric Power Quality", Stars in A Circle Publications, 1994Jagadish Babu KondraguntaNo ratings yet
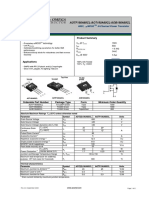
- 600V N-Channel Power TransistorDocument6 pages600V N-Channel Power TransistorAvs ElectronNo ratings yet
- CB1 Panelboard #1 (Front) : Voltage Maximum Amp Rating Per Input Terminal BlockDocument5 pagesCB1 Panelboard #1 (Front) : Voltage Maximum Amp Rating Per Input Terminal Blockjoseph mendezNo ratings yet
- InfoVista Planet 6.1 IoT LPWADocument36 pagesInfoVista Planet 6.1 IoT LPWAHassan DaudNo ratings yet
- ECG CircuitDocument118 pagesECG CircuitOmur NoorNo ratings yet
- Go Getter 2 Owners ManualDocument21 pagesGo Getter 2 Owners ManualBrian LewNo ratings yet
- Boost-Buck LED Driver Topology Delivers Low Input and Output Ripple for Automotive ApplicationsDocument4 pagesBoost-Buck LED Driver Topology Delivers Low Input and Output Ripple for Automotive ApplicationssridharmakkapatiNo ratings yet
- Eee ADocument6 pagesEee ASundaravadivel ArumugamNo ratings yet
- ALFARABI UNIV COMPUTER ARCHITECTURE I CHAPTERDocument13 pagesALFARABI UNIV COMPUTER ARCHITECTURE I CHAPTERMohammed Al-RahmaweeNo ratings yet
- LG GIS Networking Network Data Admin L2Document4 pagesLG GIS Networking Network Data Admin L2Ashish Kumar JhaNo ratings yet
- CA3102Document11 pagesCA3102bonaparteCWBNo ratings yet