You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- BCN 3224 - Exam 3 ReviewDocument34 pagesBCN 3224 - Exam 3 Reviewmgwin17No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Laplace TransformDocument7 pagesLaplace Transformtabtga100% (1)
- Bms & Hvac SystemDocument41 pagesBms & Hvac SystemHirushan Menuka100% (2)
- Process Modeling Approach for Evaluating Biodiesel ProductionDocument18 pagesProcess Modeling Approach for Evaluating Biodiesel ProductionSereneTan18_KLNo ratings yet
- Enable Remote Desktop User Access For Vspace 6 On Windows PDFDocument3 pagesEnable Remote Desktop User Access For Vspace 6 On Windows PDFAnonymous lt2LFZHNo ratings yet
- Uefi BootableDocument2 pagesUefi BootableAnonymous lt2LFZHNo ratings yet
- Cadence ManualDocument51 pagesCadence Manualapi-27099960100% (4)
- Tanner EDA Simulation DetailedDocument125 pagesTanner EDA Simulation DetailedJayaram KumarNo ratings yet
- Usernmhgj PDFDocument38 pagesUsernmhgj PDFAnonymous lt2LFZHNo ratings yet
- 10 Jan PostponeDocument2 pages10 Jan PostponeAnonymous lt2LFZHNo ratings yet
- 225 12 Rmsa BiologyDocument13 pages225 12 Rmsa BiologyAnonymous lt2LFZHNo ratings yet
- Number Series Types: Patterns & Rules to Solve Missing TermsDocument122 pagesNumber Series Types: Patterns & Rules to Solve Missing TermsAnonymous lt2LFZHNo ratings yet
- Statement Conclusions 2Document6 pagesStatement Conclusions 2Anonymous lt2LFZHNo ratings yet
- Esic Mumbai Advt.Document30 pagesEsic Mumbai Advt.Anonymous BR2GrHNo ratings yet
- Vao Ayakudi Question Paper With Answer Key WWW - Tnpsctamil.inDocument11 pagesVao Ayakudi Question Paper With Answer Key WWW - Tnpsctamil.inAnonymous lt2LFZHNo ratings yet
- Jumble SentenceDocument5 pagesJumble SentenceAnonymous lt2LFZHNo ratings yet
- Sophisticated Waste Disposal by Integrated Use of Embedded SystemsDocument8 pagesSophisticated Waste Disposal by Integrated Use of Embedded SystemsAnonymous lt2LFZHNo ratings yet
- Get Published Quick Guide PDFDocument4 pagesGet Published Quick Guide PDFاحمد صالحNo ratings yet
- Anna University ExaminationsDocument1 pageAnna University ExaminationsPrince Selvadasan DurairajNo ratings yet
- Application Form For VITEEE - 2016: Full Name Dhurga K Application. No.: 2016194249Document1 pageApplication Form For VITEEE - 2016: Full Name Dhurga K Application. No.: 2016194249Anonymous lt2LFZHNo ratings yet
- AwpDocument5 pagesAwpAnonymous lt2LFZHNo ratings yet
- EC1352Document31 pagesEC1352Anonymous lt2LFZHNo ratings yet
- Unit1 KVijaya PDFDocument18 pagesUnit1 KVijaya PDFRammohan KakiNo ratings yet
- EC1352Document31 pagesEC1352Anonymous lt2LFZHNo ratings yet
- AnswersDocument8 pagesAnswersAnonymous lt2LFZHNo ratings yet
- Author's Information FormDocument1 pageAuthor's Information FormAnonymous lt2LFZHNo ratings yet
- Apt I TricksDocument6 pagesApt I Tricksvinod kumar maddineniNo ratings yet
- Ibps Clerk Mains Capsule 2015 16Document73 pagesIbps Clerk Mains Capsule 2015 16Anonymous lt2LFZHNo ratings yet
- LPC Form Kalvikural ComDocument2 pagesLPC Form Kalvikural ComAnonymous lt2LFZHNo ratings yet
- Inventory Usage SampleDocument27 pagesInventory Usage SampleAnonymous lt2LFZHNo ratings yet
- Two Marks AnswersDocument8 pagesTwo Marks AnswersAnonymous lt2LFZHNo ratings yet
- GNS3 Lab Setup For CCNA SecurityDocument13 pagesGNS3 Lab Setup For CCNA SecurityJeff Ben FabregasNo ratings yet
- Class Room Allotment SystemDocument7 pagesClass Room Allotment SystemPRABANo ratings yet
- Heat 4e Chap02 LectureDocument48 pagesHeat 4e Chap02 LectureAbdul MohsinNo ratings yet
- Numerical SolutionDocument7 pagesNumerical SolutionemebusamuelNo ratings yet
- Alpha Eritrean Engineers Community's Magazine (October's Issue)Document8 pagesAlpha Eritrean Engineers Community's Magazine (October's Issue)meharigrwNo ratings yet
- Strength Calculation and Dimensioning of Joints: Prepared By: Samson Yohannes Assistant ProfessorDocument45 pagesStrength Calculation and Dimensioning of Joints: Prepared By: Samson Yohannes Assistant ProfessorBK MKNo ratings yet
- Pai Ch03 ArrayDocument33 pagesPai Ch03 ArrayanonNo ratings yet
- Bulb Flat Sizes, Dimensions and Weight - Steel Bulb Flats - Weight Table - Rushmore Enterprises IncDocument3 pagesBulb Flat Sizes, Dimensions and Weight - Steel Bulb Flats - Weight Table - Rushmore Enterprises IncHerlambang Miracle YudhianNo ratings yet
- Mastertop TC 458 PDFDocument3 pagesMastertop TC 458 PDFFrancois-No ratings yet
- Accenture Robotic Process Auto POV FinalDocument12 pagesAccenture Robotic Process Auto POV FinalJake RuksNo ratings yet
- Andrews General Usability HeuristicsDocument1 pageAndrews General Usability HeuristicsGhaniNo ratings yet
- Frame RelayDocument33 pagesFrame RelayDilsha AshrafNo ratings yet
- Introduction To Soil MechanicsDocument20 pagesIntroduction To Soil MechanicsMaeen AhmedNo ratings yet
- OpenDSS Level 1 TrainingDocument85 pagesOpenDSS Level 1 Trainingraul_bsu100% (1)
- Pilot Operated Safety Relief ValvesDocument6 pagesPilot Operated Safety Relief ValvesfabioNo ratings yet
- Saudi Technical Trade Test - Welder CategoryDocument4 pagesSaudi Technical Trade Test - Welder CategoryshabashakkimNo ratings yet
- 2012 JBLM MILCON Tacoma Chamber of Commerce Oct2012Document13 pages2012 JBLM MILCON Tacoma Chamber of Commerce Oct2012Brackett427No ratings yet
- Heat Exchangers: T T T TDocument11 pagesHeat Exchangers: T T T Tcjc0706No ratings yet
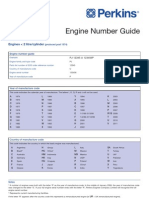
- Perkins Engine Number Guide PP827Document6 pagesPerkins Engine Number Guide PP827Muthu Manikandan100% (1)
- Face Recognization and Detection System For Attendance.Document39 pagesFace Recognization and Detection System For Attendance.Deepanshu Sharma33% (3)
- Cathode Ray Oscilloscope (Cro)Document2 pagesCathode Ray Oscilloscope (Cro)jesunathan44@yahoo.comNo ratings yet
- Topaz HTC English Manual PDFDocument232 pagesTopaz HTC English Manual PDFRafael AdrianNo ratings yet
- TG078 TC ER Tray Cable RatingDocument2 pagesTG078 TC ER Tray Cable Ratingphugogang1No ratings yet
- Competency-Check-H e I ADocument20 pagesCompetency-Check-H e I Abaldo yellow4No ratings yet
- 72.core Cut Reference SP-24Document1 page72.core Cut Reference SP-24DMJ NagpurNo ratings yet
- Instruction Manual Manuel D'Instruction Manual de InstruccionesDocument136 pagesInstruction Manual Manuel D'Instruction Manual de InstruccionesPrabish KumarNo ratings yet
- Catalog DuctingDocument9 pagesCatalog DuctingchristiadiargaNo ratings yet