You might also like
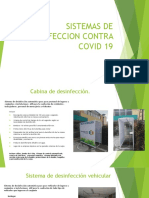
- Catalogo de Desinfeccion PDFDocument3 pagesCatalogo de Desinfeccion PDFJoseCorreaNo ratings yet
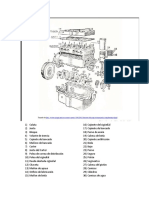
- Partes principales motorDocument3 pagesPartes principales motorJoseCorreaNo ratings yet
- Cotizacion 054d24Document1 pageCotizacion 054d24JoseCorreaNo ratings yet
- Folleto HidrolavadoraDocument2 pagesFolleto HidrolavadoraJoseCorreaNo ratings yet
- EersaDocument1 pageEersaJoseCorreaNo ratings yet
- Cotizacion 054d24Document1 pageCotizacion 054d24JoseCorreaNo ratings yet
- Catalogo Motor Forte PDFDocument54 pagesCatalogo Motor Forte PDFJoseCorreaNo ratings yet
- 123Document24 pages123Juan David QuiñonesNo ratings yet
- Practica de Medicion de Temperatura-2Document4 pagesPractica de Medicion de Temperatura-2JoseCorreaNo ratings yet
- EnergíasDocument288 pagesEnergíasLeni SanchezNo ratings yet
- OSZJTNDocument2 pagesOSZJTNJoseCorreaNo ratings yet
- Estacion No 4Document1 pageEstacion No 4JoseCorreaNo ratings yet
- 1 Lista APUS 2015 PDFDocument35 pages1 Lista APUS 2015 PDFfpmejiaNo ratings yet
- Guia de Orientacion Al Aspirante Verificacion Requisitos Minimos PDFDocument25 pagesGuia de Orientacion Al Aspirante Verificacion Requisitos Minimos PDFSergio PérezNo ratings yet
- Apus BaseDocument452 pagesApus BasedannaluciaNo ratings yet
- MATRIX Guia UsuarioDocument8 pagesMATRIX Guia UsuarioCamilo Andrés Cortes Torres45% (11)
- DiaDocument10 pagesDiaJoseCorreaNo ratings yet
- Manual Software Fluid SIMDocument5 pagesManual Software Fluid SIMJoseCorreaNo ratings yet
- Fic Has GasolinaDocument9 pagesFic Has GasolinaJoseCorreaNo ratings yet
- Clasificacion Del HuevoDocument14 pagesClasificacion Del HuevoJoseCorreaNo ratings yet
- Ex PosicionDocument16 pagesEx PosicionJoseCorreaNo ratings yet
- Manual de Operacion VolquetaDocument29 pagesManual de Operacion VolquetaJoseCorreaNo ratings yet
- Oferta Motor HPDocument2 pagesOferta Motor HPJoseCorreaNo ratings yet
- NKFVQODocument2 pagesNKFVQOJoseCorreaNo ratings yet
- Imagen ChevereDocument1 pageImagen ChevereJoseCorreaNo ratings yet
- Catalogo Resumido WestarcoDocument2 pagesCatalogo Resumido Westarcodilgo0250% (4)
- Tercott MtsDocument1 pageTercott MtsJoseCorreaNo ratings yet
- Martillos Del ImpactorDocument2 pagesMartillos Del ImpactorJoseCorreaNo ratings yet
- Diplomado - Lub Estrategica - Plegable PDFDocument9 pagesDiplomado - Lub Estrategica - Plegable PDFAlejo FlorezNo ratings yet
- Anexo 1. Listado de InstitucionesDocument22 pagesAnexo 1. Listado de InstitucionesJoseCorreaNo ratings yet
- Ejercicios Resueltos Hibbeler Grupo 041Document10 pagesEjercicios Resueltos Hibbeler Grupo 041Romy Cueva Gadea100% (1)
- Informe EscurrimientoDocument74 pagesInforme EscurrimientoMaJuTorresRimeyNo ratings yet
- Fisica-Dinamica CompressDocument20 pagesFisica-Dinamica CompressBRITANY ABIGAIL CARRASCO AGUIRRENo ratings yet
- Reconstrucción de Hechos de TránsitoDocument4 pagesReconstrucción de Hechos de TránsitoPaulina MurilloNo ratings yet
- Ensayos de campo CPT, PMT, dilatómetro y downholeDocument11 pagesEnsayos de campo CPT, PMT, dilatómetro y downholehector mayorgaNo ratings yet
- Ficha 07-Velocidad y VisibilidadDocument15 pagesFicha 07-Velocidad y VisibilidadSebastián RocaNo ratings yet
- Ventajas del tricono sellado sobre el estándarDocument11 pagesVentajas del tricono sellado sobre el estándarManu GreinerNo ratings yet
- PascoDocument49 pagesPascoEddy Aldair Benique MadariagaNo ratings yet
- 2.1 Galileo y Aristoteles ComparacionDocument24 pages2.1 Galileo y Aristoteles ComparacionWilberth A. Gomez Silva0% (1)
- Tipos de DrenajesDocument27 pagesTipos de DrenajesNestor Gonzalo Vera ChavezNo ratings yet
- Taller Final MecanicaDocument13 pagesTaller Final MecanicaJose LuisNo ratings yet
- Movimiento Uniforme Acelerado y Segunda Ley de NewtonDocument17 pagesMovimiento Uniforme Acelerado y Segunda Ley de NewtonAlejandro JiménezNo ratings yet
- Tema 7 FQ 2c2ba EsoDocument2 pagesTema 7 FQ 2c2ba EsoMonieNo ratings yet
- Taller 3 FisicaDocument6 pagesTaller 3 Fisicaluis herreraNo ratings yet
- ¿Violación de Las Leyes de La Termodinámica?Document7 pages¿Violación de Las Leyes de La Termodinámica?Edwar ForeroNo ratings yet
- Taller Ficica Eje 3Document7 pagesTaller Ficica Eje 3Francisco Ospina ForeroNo ratings yet
- Suelos Estabilizados Con Metodos MecanicosDocument37 pagesSuelos Estabilizados Con Metodos MecanicosJosé Luis Ramos VilaNo ratings yet
- Equilibrio Ejercicios Resueltos Parte II y Ejercicios PropuestosDocument4 pagesEquilibrio Ejercicios Resueltos Parte II y Ejercicios Propuestosgianfranco vasquez0% (1)
- Fundamento Numero de ReynoldsDocument2 pagesFundamento Numero de ReynoldsLuis GironNo ratings yet
- Mecanica de Fluidos. Teoria. UnamDocument136 pagesMecanica de Fluidos. Teoria. UnamRichar Sempértegui DíazNo ratings yet
- Ultimo Trabajo de Diseñ HidraulicoDocument17 pagesUltimo Trabajo de Diseñ HidraulicoDenyNo ratings yet
- Clase 8 Maniobras Red de ArrastreDocument63 pagesClase 8 Maniobras Red de ArrastreOcampo Uribe Julhina100% (1)
- Capacidad de Carga Friccion de PiloteDocument14 pagesCapacidad de Carga Friccion de PiloteW. Yosse A.M.No ratings yet
- Trabajo Potencia y EnergiaDocument6 pagesTrabajo Potencia y EnergiaJulio CabreraNo ratings yet
- U05 A Cantidad de Movimiento 2018Document3 pagesU05 A Cantidad de Movimiento 2018eugenioNo ratings yet
- Velocidad Terminal de ParticulasDocument7 pagesVelocidad Terminal de ParticulasAnonymous RUjUW9AjtrNo ratings yet
- MDS - LAB 4-4Document42 pagesMDS - LAB 4-4Rodrigo Christian Ureta RocaNo ratings yet
- Ensayo Fisica de Fluidos 1Document6 pagesEnsayo Fisica de Fluidos 1Erick OrtegaNo ratings yet
- Fuerza - Presión Prueba 7moDocument57 pagesFuerza - Presión Prueba 7movanessapereiramNo ratings yet
- Problemas Propuestos Trabajo y PotenciaDocument4 pagesProblemas Propuestos Trabajo y PotenciaRubén Mamani DelgadoNo ratings yet