You might also like
- Finite Difference Buckling Analysis of Non Uniform ColumnsDocument8 pagesFinite Difference Buckling Analysis of Non Uniform ColumnsJules NanaNo ratings yet
- Modeling SCB Frames Using Beam-Column Elements: January 2013Document28 pagesModeling SCB Frames Using Beam-Column Elements: January 2013Maha Moddather Hassan100% (1)
- Sidesway Web Buckling of Steel BeamsDocument12 pagesSidesway Web Buckling of Steel BeamsYuth Yuthdanai100% (1)
- Deflection of BeamsDocument5 pagesDeflection of BeamsMohammedAlasaadNo ratings yet
- Immediate Deflection in Concrete BeamsDocument11 pagesImmediate Deflection in Concrete BeamsSeifeldin Ali MarzoukNo ratings yet
- Matrix Structure Analysis Mtech Paper 1Document2 pagesMatrix Structure Analysis Mtech Paper 1Bipul Prince BarmanNo ratings yet
- Beam Analysis Using Stiffness MethodDocument148 pagesBeam Analysis Using Stiffness MethodArif WaitsNo ratings yet
- Finite Element Analysis of Suspension Bridges - ElsevierDocument17 pagesFinite Element Analysis of Suspension Bridges - ElsevierNgoc PhanNo ratings yet
- The Effect of Shear Deformations On The Elastic Critical Column LoadDocument5 pagesThe Effect of Shear Deformations On The Elastic Critical Column Loadashok paul100% (1)
- Matrix Analysis of Framed Structures Exam QuestionsDocument2 pagesMatrix Analysis of Framed Structures Exam QuestionsAmit ThoriyaNo ratings yet
- 1-Structural-Design 2012 Yield LineDocument52 pages1-Structural-Design 2012 Yield LineJake BloggerNo ratings yet
- Brief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)Document33 pagesBrief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)masoodkamalNo ratings yet
- FEM Solved ExampleDocument3 pagesFEM Solved ExampleMian AsimNo ratings yet
- Static Beam Deflection and ReactionsDocument58 pagesStatic Beam Deflection and ReactionsMohammad TahaNo ratings yet
- Analytical Solutions in Elasto-Plastic Bending of Beams With PDFDocument12 pagesAnalytical Solutions in Elasto-Plastic Bending of Beams With PDFMariusz Milewski50% (2)
- Member resistance under combined bi-axial bending and axial compressionDocument12 pagesMember resistance under combined bi-axial bending and axial compressionrd radenNo ratings yet
- Connections 1 - Ch.4 Tension Members Notes (154-187)Document12 pagesConnections 1 - Ch.4 Tension Members Notes (154-187)travis8zimmermannNo ratings yet
- Lecture 3 Bec304Document35 pagesLecture 3 Bec304Mohd Nizam ShakimonNo ratings yet
- Questions On Advanced ConcreteDocument1 pageQuestions On Advanced ConcreteRatna Sai100% (1)
- Final Term Paper SubmissionDocument5 pagesFinal Term Paper SubmissionKandousi YassineNo ratings yet
- Essay Questions FEMDocument21 pagesEssay Questions FEMharshamech360No ratings yet
- Principles of RCCDocument28 pagesPrinciples of RCCprashmce100% (1)
- Chapter 04-Dynamic Response of Buildings PDFDocument64 pagesChapter 04-Dynamic Response of Buildings PDFAngelique EsquillaNo ratings yet
- Computers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliDocument17 pagesComputers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliSayna KellenyNo ratings yet
- FEM ReferencesDocument26 pagesFEM ReferencesephNo ratings yet
- Finite Element Method Axially Loaded RodsDocument22 pagesFinite Element Method Axially Loaded RodshalimsevimNo ratings yet
- Beams On Elastic FoundationDocument20 pagesBeams On Elastic FoundationShashi Bhushan KumarNo ratings yet
- On The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsDocument8 pagesOn The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsPauloAndresSepulvedaNo ratings yet
- Composite - Design ProjectDocument6 pagesComposite - Design ProjectSomen DasNo ratings yet
- 3340 Lectures 7 To 12 S1 2015Document61 pages3340 Lectures 7 To 12 S1 2015utsav_koshtiNo ratings yet
- Fundamentals of Photoelastic Stress AnalysisDocument48 pagesFundamentals of Photoelastic Stress AnalysiserickNo ratings yet
- L12 - Plastic Analysis PDFDocument9 pagesL12 - Plastic Analysis PDFSunil Kumar P GNo ratings yet
- Stability Chapter 01Document15 pagesStability Chapter 01Fabio IannoneNo ratings yet
- STRUCTURAL ANALYSIS ACE MCQssDocument70 pagesSTRUCTURAL ANALYSIS ACE MCQssAndresDelaVegaNo ratings yet
- Ch#5 CST Element PDFDocument17 pagesCh#5 CST Element PDFAndre Sufadia SimorangkirNo ratings yet
- Conjugate Beam METHODDocument13 pagesConjugate Beam METHODAdam Ahmed100% (1)
- Reinforced Concrete Slab DesignDocument29 pagesReinforced Concrete Slab DesignMapanguriSitoeNo ratings yet
- Modal Design in Structural DynamicsDocument8 pagesModal Design in Structural Dynamicspanos2244662864No ratings yet
- Internal Loadings Developed in Structural MembersDocument31 pagesInternal Loadings Developed in Structural MembersJOSE MANUEL TORIZ RUELASNo ratings yet
- FINITE ELEMENT 18ME73 ASSIGNMENTSDocument10 pagesFINITE ELEMENT 18ME73 ASSIGNMENTSFOODIE USNo ratings yet
- Stress AnalysisDocument18 pagesStress Analysisrasif88718100% (1)
- Frame Analysis: Determine Natural Periods and Design Base Shear ForcesDocument6 pagesFrame Analysis: Determine Natural Periods and Design Base Shear Forcesnial69100% (1)
- Historical Technical Basis for the Cb CoefficientDocument5 pagesHistorical Technical Basis for the Cb CoefficientcharlesroberNo ratings yet
- Design of RC ShellsDocument9 pagesDesign of RC Shellscacrcarlos100% (1)
- CE6102 - 5 - Application of Newton Raphson Techniques To Elasto-Plastic Model With Constant Yield SurfacesDocument9 pagesCE6102 - 5 - Application of Newton Raphson Techniques To Elasto-Plastic Model With Constant Yield SurfacesandreashendiNo ratings yet
- Numerical Methods in Engineering Journal Damping MatricesDocument6 pagesNumerical Methods in Engineering Journal Damping MatricesAnonymous pEICfUhTPMNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Finite Element Simulation in Surface and Subsurface HydrologyFrom EverandFinite Element Simulation in Surface and Subsurface HydrologyNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Engineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandEngineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989From EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadNo ratings yet
- Nonlinear Ordinary Differential Equations in Transport ProcessesFrom EverandNonlinear Ordinary Differential Equations in Transport ProcessesNo ratings yet
- 4.2.1 Element Stiffness of A 3 Node Truss Member: Ux X X XDocument8 pages4.2.1 Element Stiffness of A 3 Node Truss Member: Ux X X Xsrinadh1602No ratings yet
- Naptel BeamDocument7 pagesNaptel BeamVenkata DineshNo ratings yet
- Naptel Beam 1 PDFDocument9 pagesNaptel Beam 1 PDFVenkata DineshNo ratings yet
- Di GVDocument11 pagesDi GVRashedNo ratings yet
- Clow Pipe Fittings Flange c110 PDFDocument20 pagesClow Pipe Fittings Flange c110 PDFRashedNo ratings yet
- PRV DRV Range PDFDocument7 pagesPRV DRV Range PDFRashedNo ratings yet
- SWD BS 8110 97Document63 pagesSWD BS 8110 97Stephanie MiyataNo ratings yet
- SP-34-1987 Handbook On Reinforcement and DetailingDocument286 pagesSP-34-1987 Handbook On Reinforcement and DetailingEr Prabhakara B88% (69)
- WQ Standards IS 10500Document16 pagesWQ Standards IS 10500Himanshu GautamNo ratings yet
- Apco Air Release Valves Arv Arv Air Release Valves Sales 600Document4 pagesApco Air Release Valves Arv Arv Air Release Valves Sales 600RashedNo ratings yet
- ETABS V9 Introductory TutorialDocument68 pagesETABS V9 Introductory Tutorialphnc100% (2)
- Tarhe Bozorg Stephen HawkingDocument85 pagesTarhe Bozorg Stephen HawkingRashedNo ratings yet
- Columns 1Document16 pagesColumns 1ShahriazSAMNo ratings yet
- PE100 pipe dimensions and weights for pressure pipesDocument1 pagePE100 pipe dimensions and weights for pressure pipesRashedNo ratings yet
- Shear Wall Design PDFDocument13 pagesShear Wall Design PDFRashed100% (3)
- Design of A BuildingDocument1 pageDesign of A BuildingRashedNo ratings yet
- Plane Frame Analysis ModuleDocument8 pagesPlane Frame Analysis ModuleRashedNo ratings yet
- Computer Aided Design & Advanced Structural AnalysisDocument38 pagesComputer Aided Design & Advanced Structural AnalysisRashedNo ratings yet
- Advanced Structure Analysis PDFDocument41 pagesAdvanced Structure Analysis PDFRashedNo ratings yet
- Design of BuildingDocument1 pageDesign of BuildingRashedNo ratings yet
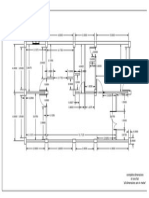
- Complete Dimensions of One Flat 'All Dimensions Are in Meter'Document1 pageComplete Dimensions of One Flat 'All Dimensions Are in Meter'RashedNo ratings yet
- Advanced Structure Analysis PDFDocument41 pagesAdvanced Structure Analysis PDFRashedNo ratings yet
- Advanced Structural AnalysisDocument5 pagesAdvanced Structural AnalysisRashedNo ratings yet
- Pakistan Academy School Al-Ahmadi Kuwait Monthly Test Schedule Class: 9 FBISEDocument16 pagesPakistan Academy School Al-Ahmadi Kuwait Monthly Test Schedule Class: 9 FBISEapi-126472277No ratings yet
- Body Language and AttractionDocument21 pagesBody Language and Attractionpoiqwe1No ratings yet
- Phil Iri Presentation GR.6Document9 pagesPhil Iri Presentation GR.6tomeljayNo ratings yet
- Los Valores en InglesDocument4 pagesLos Valores en InglesYeinyNo ratings yet
- 2004 - Rosser - Faculty Members Intentions To Leave PDFDocument26 pages2004 - Rosser - Faculty Members Intentions To Leave PDFCarlos Arturo HoyosNo ratings yet
- Well Testing and Interpretation For Horizontal WellsDocument6 pagesWell Testing and Interpretation For Horizontal Wellsmiguel_jose123No ratings yet
- The Real Case For Aushwitz - Carlo Mattogno PDFDocument692 pagesThe Real Case For Aushwitz - Carlo Mattogno PDFJordan100% (3)
- G10 Q3 PPT3Document20 pagesG10 Q3 PPT3Ma. Shiela Mira NarceNo ratings yet
- QC Story TRAINING SLIDEDocument47 pagesQC Story TRAINING SLIDEDIPAK VINAYAK SHIRBHATE83% (6)
- Cover Page ( (DLW 5013) ) 11 April 2020 - .222 PDFDocument4 pagesCover Page ( (DLW 5013) ) 11 April 2020 - .222 PDFElamaaran AlaggarNo ratings yet
- Electromagnetism WorksheetDocument3 pagesElectromagnetism WorksheetGuan Jie KhooNo ratings yet
- 2D Euler Riemann RoeDocument72 pages2D Euler Riemann RoeJRNo ratings yet
- Video WorksheetDocument9 pagesVideo Worksheetapi-316047658100% (1)
- Playboy 2Document12 pagesPlayboy 2theraphimNo ratings yet
- HydroVision Brochure Q Eye PSC 2014Document4 pagesHydroVision Brochure Q Eye PSC 2014sreeyukthaNo ratings yet
- Kone ErrorDocument2 pagesKone Errorrully hidayatullah50% (2)
- ManualDocument572 pagesManualjoejunkisNo ratings yet
- Divemaster Repasos ManualDocument9 pagesDivemaster Repasos ManualIsrael Mauricio Olivares Millán100% (1)
- Master Thesis Natural Oil AbsorbentDocument178 pagesMaster Thesis Natural Oil AbsorbentFaris Mat100% (1)
- Purpose Meaning MeaninginlifeDocument2 pagesPurpose Meaning MeaninginlifeTaufik GeodetikNo ratings yet
- Camote Tops Acid-BaseDocument3 pagesCamote Tops Acid-BaseAldren BeliberNo ratings yet
- NCBSSH e FormDocument59 pagesNCBSSH e FormDaryll Anne LagtaponNo ratings yet
- IRL - Information Request List For Performance DiagnosticsDocument3 pagesIRL - Information Request List For Performance Diagnosticsd280299No ratings yet
- Beer Lambert LawDocument2 pagesBeer Lambert LawMuhammad ZubairNo ratings yet
- PX Method 2 - Tim Ferriss - Sample Landing PageDocument5 pagesPX Method 2 - Tim Ferriss - Sample Landing PageshruikunNo ratings yet
- Animate Ggplots With Gganimate::: Cheat SheetDocument2 pagesAnimate Ggplots With Gganimate::: Cheat SheetJosé AnguloNo ratings yet
- Cluster Sampling: ProcedureDocument12 pagesCluster Sampling: ProcedureAahil RazaNo ratings yet
- Critical Thinking: The Power To Think BeyondDocument16 pagesCritical Thinking: The Power To Think BeyondLuis Fernando ObstaculoNo ratings yet
- Vdocument - in - RM PPT On A Study of Work Life Balance of Generation y at Thyssenkrupp PuneDocument35 pagesVdocument - in - RM PPT On A Study of Work Life Balance of Generation y at Thyssenkrupp Puneut123No ratings yet