You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Mousetrap RacerDocument16 pagesMousetrap RacerLarry LambertNo ratings yet
- Developing Soft Skills and Conflict ResolutionDocument7 pagesDeveloping Soft Skills and Conflict ResolutionVelmurugan ThiagarajanNo ratings yet
- Developing Soft Skills and Personality Development Answer Key For Week 1 Assignment Multiple Choice QuestionsDocument5 pagesDeveloping Soft Skills and Personality Development Answer Key For Week 1 Assignment Multiple Choice QuestionsVelmurugan Thiagarajan100% (1)
- Inversion of Mechanisms for Changing Motion TypesDocument78 pagesInversion of Mechanisms for Changing Motion TypesQasim AliNo ratings yet
- Developing Soft SkillsDocument17 pagesDeveloping Soft SkillsShíkhár ShármãNo ratings yet
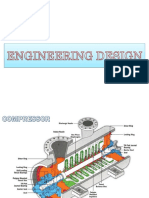
- Engineering DesignDocument13 pagesEngineering DesignVelmurugan ThiagarajanNo ratings yet
- Engg MechanicsDocument3 pagesEngg MechanicsVelmurugan ThiagarajanNo ratings yet
- TrizDocument1 pageTrizVelmurugan ThiagarajanNo ratings yet
- 16ME215 DOM SyllabusDocument1 page16ME215 DOM SyllabusVelmurugan ThiagarajanNo ratings yet
- Mechanical Interview QuestionsDocument30 pagesMechanical Interview Questionsfarhanf123No ratings yet
- Engineering Design GateDocument12 pagesEngineering Design GateVelmurugan ThiagarajanNo ratings yet
- Anna Univ EGDocument3 pagesAnna Univ EGVelmurugan ThiagarajanNo ratings yet
- Thermal Engineering Course Objectives and OutcomesDocument2 pagesThermal Engineering Course Objectives and OutcomesVelmurugan ThiagarajanNo ratings yet
- TEACHER COURSE SUMMARY OBJECTIVES SCHEDULEDocument10 pagesTEACHER COURSE SUMMARY OBJECTIVES SCHEDULEVenugopal ReddyvariNo ratings yet
- Finite Element Method: January 12, 2004Document26 pagesFinite Element Method: January 12, 2004happyshamu100% (1)
- Principle of Virtual WorkDocument19 pagesPrinciple of Virtual WorkVelmurugan ThiagarajanNo ratings yet
- Mousetrap RacerDocument16 pagesMousetrap RacerLarry LambertNo ratings yet
- Lesson Plan TQMDocument5 pagesLesson Plan TQMVelmurugan ThiagarajanNo ratings yet
- Modern Machning ProcessDocument2 pagesModern Machning ProcessVelmurugan ThiagarajanNo ratings yet
- Course Delivery Plan EMMDocument2 pagesCourse Delivery Plan EMMVelmurugan ThiagarajanNo ratings yet
- Kinematics Fundamental ConceptsDocument16 pagesKinematics Fundamental ConceptsVelmurugan ThiagarajanNo ratings yet
- DSC RegulationsDocument32 pagesDSC RegulationsVelmurugan ThiagarajanNo ratings yet
- Lesson Plan EmmDocument5 pagesLesson Plan EmmVelmurugan ThiagarajanNo ratings yet
- Dfma PSG SyllabusDocument1 pageDfma PSG SyllabusVelmurugan ThiagarajanNo ratings yet
- TQM Nov Dec 2012Document31 pagesTQM Nov Dec 2012Velmurugan ThiagarajanNo ratings yet
- Statistical TablesDocument10 pagesStatistical TablesramanatenaliNo ratings yet
- Total Quality Management (May June 2013) : 1. List Any Four Dimensions of QualityDocument12 pagesTotal Quality Management (May June 2013) : 1. List Any Four Dimensions of QualityVelmurugan ThiagarajanNo ratings yet
- 101 Angol 3Document70 pages101 Angol 3Mahaletchumy SubramaniamNo ratings yet
- DME Q-Paper 04-12-2013 PDFDocument4 pagesDME Q-Paper 04-12-2013 PDFVelmurugan ThiagarajanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Two-Ray Propagation Model LabDocument9 pagesTwo-Ray Propagation Model LabAzmat Ali ShahNo ratings yet
- Risk Management in Construction Project ManagementDocument8 pagesRisk Management in Construction Project ManagementShakil AhmedNo ratings yet
- Module 4 Homework - Foundations For MultiplicationDocument23 pagesModule 4 Homework - Foundations For MultiplicationValerie Yenshaw100% (1)
- 1st Periodical TestDocument1 page1st Periodical TestbjnatsNo ratings yet
- A Concise Introduction to SetsDocument7 pagesA Concise Introduction to SetsAbdul BasitNo ratings yet
- Forecasting Aggregate Consumption in the Lower MainlandDocument51 pagesForecasting Aggregate Consumption in the Lower MainlandVelina MilevaNo ratings yet
- Source CodingDocument8 pagesSource CodingAmith periyapatnaNo ratings yet
- Mathematics P2 Feb-March 2014 Memo Afr & EngDocument14 pagesMathematics P2 Feb-March 2014 Memo Afr & Engaleck mthethwaNo ratings yet
- Quantitative TechniquesDocument62 pagesQuantitative TechniquesSteffanie GranadaNo ratings yet
- Las Quarter 2 Final (For Submission)Document17 pagesLas Quarter 2 Final (For Submission)James GonzagaNo ratings yet
- DataGridView FAQDocument69 pagesDataGridView FAQyamanoblu100% (1)
- Math 323: Solutions To Homework 9Document8 pagesMath 323: Solutions To Homework 9AlbertoAlcaláNo ratings yet
- Gtu Micro Processor PracticalDocument79 pagesGtu Micro Processor Practicalbaba100% (1)
- Cracking The Last Mystery of The Rubik's Cube J Palmer - New Scientist, 2008Document4 pagesCracking The Last Mystery of The Rubik's Cube J Palmer - New Scientist, 2008Erno RubikNo ratings yet
- Physical Chemistry Intensive and Extensive PropertiesDocument23 pagesPhysical Chemistry Intensive and Extensive PropertiesAdilla Rizka YonitaNo ratings yet
- GuardSoft Cerberus Full Software Cracked Download (Pc-Mac) CrackDocument2 pagesGuardSoft Cerberus Full Software Cracked Download (Pc-Mac) CrackMegatoreNo ratings yet
- Systems Analysis Modelling and SimulationDocument311 pagesSystems Analysis Modelling and SimulationOlukorede Osuolale100% (1)
- Distance Rate and Time Problems WorksheetDocument15 pagesDistance Rate and Time Problems Worksheetmahisa agniNo ratings yet
- Systems of Inequalities Solved(MathDocument25 pagesSystems of Inequalities Solved(MathEd VillNo ratings yet
- Quiz 3 DerivativesDocument4 pagesQuiz 3 DerivativesmateriaoscuraNo ratings yet
- Lube SelectDocument7 pagesLube SelectLLNo ratings yet
- Circle the correct math answers quizDocument10 pagesCircle the correct math answers quizShukri AidahNo ratings yet
- (Ggplot2 Data Visualization) Alboukadel Kassambara - Guide To Create Beautiful Graphics in R-STHDA (2013) PDFDocument238 pages(Ggplot2 Data Visualization) Alboukadel Kassambara - Guide To Create Beautiful Graphics in R-STHDA (2013) PDFGrasiela SantanaNo ratings yet
- (AMC8) Permutations and CombinationsDocument4 pages(AMC8) Permutations and CombinationsNam NGUYENNo ratings yet
- Seismic Analysis of Steel Storage Tanks, OverviewDocument14 pagesSeismic Analysis of Steel Storage Tanks, OverviewRodolfo CNo ratings yet
- Minex GeoMod&Pit DesignDocument48 pagesMinex GeoMod&Pit DesignAndrés Jiménez100% (8)
- Application Programming GuideDocument210 pagesApplication Programming GuideZaki La ColombeNo ratings yet
- Math Emetics ComputerDocument3 pagesMath Emetics ComputerAbhisek MohantaNo ratings yet
- 18.905-Massey W.S. A Basic Course in Algebraic Topology 1991Document444 pages18.905-Massey W.S. A Basic Course in Algebraic Topology 1991Abundio P. Genius86% (7)
- Tabulation of Error Function Values PDFDocument1 pageTabulation of Error Function Values PDFReyes DanaeNo ratings yet