You might also like
- SynopsisDocument11 pagesSynopsisGuru D Rising SunNo ratings yet
- Development of Two-Input Adaptive Noise Canceller For Wideband and Narrowband Noise SignalsDocument11 pagesDevelopment of Two-Input Adaptive Noise Canceller For Wideband and Narrowband Noise Signalshimayath0606No ratings yet
- Acoustic Noise and Echo Canceling With Microphone Array: Mattias Dahl,, and Ingvar ClaessonDocument9 pagesAcoustic Noise and Echo Canceling With Microphone Array: Mattias Dahl,, and Ingvar ClaessonFarrukhNo ratings yet
- Active Noise Reduction in Ventilation DuctsDocument9 pagesActive Noise Reduction in Ventilation DuctsRobson Queiroz DamascenoNo ratings yet
- VHDL Noise CancellerDocument8 pagesVHDL Noise Cancellert.sin48100% (1)
- A Self-Steering Digital Microphone Array: At&T NJ, UsaDocument4 pagesA Self-Steering Digital Microphone Array: At&T NJ, UsaMayssa RjaibiaNo ratings yet
- Adaptive Blind Noise Suppression in Some Speech Processing ApplicationsDocument5 pagesAdaptive Blind Noise Suppression in Some Speech Processing ApplicationsSai Swetha GNo ratings yet
- Surround Noise Cancellation and Speech Enhancement Using Sub Band Filtering and Spectral SubtractionDocument8 pagesSurround Noise Cancellation and Speech Enhancement Using Sub Band Filtering and Spectral Subtractionhammadriaz1No ratings yet
- High Performance AXI4 To AHB Bridge (Using A Local Interface)Document5 pagesHigh Performance AXI4 To AHB Bridge (Using A Local Interface)Editor IJRITCCNo ratings yet
- Echo Cancellation Algorithms Using Adaptive Filters: A Comparative StudyDocument8 pagesEcho Cancellation Algorithms Using Adaptive Filters: A Comparative StudyidescitationNo ratings yet
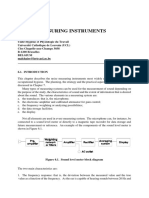
- 6 Sound Measuring InstrumentsDocument16 pages6 Sound Measuring InstrumentsVinayak GhatageNo ratings yet
- Adaptive Blind Noise Suppression in Some Speech Processing ApplicationsDocument15 pagesAdaptive Blind Noise Suppression in Some Speech Processing Applicationsapi-26172869No ratings yet
- Two-Sensor Adaptive Noise CancellationDocument5 pagesTwo-Sensor Adaptive Noise CancellationilgisizalakasizNo ratings yet
- Adaptive Noise CancellationDocument52 pagesAdaptive Noise CancellationAbdul Salim NNo ratings yet
- A Comparison - Of.acoustic - Absortion.coefficient - Measuring.in - Situ.method (Andrew.R.barnard)Document8 pagesA Comparison - Of.acoustic - Absortion.coefficient - Measuring.in - Situ.method (Andrew.R.barnard)Raphael LemosNo ratings yet
- Hardware Implementation of Adaptive Noise Cancellation Over DSP Kit TMS320C6713Document12 pagesHardware Implementation of Adaptive Noise Cancellation Over DSP Kit TMS320C6713AI Coordinator - CSC JournalsNo ratings yet
- Adaptive Filter Application in Echo Cancellation System and Implementation Using FPGADocument13 pagesAdaptive Filter Application in Echo Cancellation System and Implementation Using FPGAZeyad Tareq Al SaroriNo ratings yet
- Noise Canceling in Audio Signal With Adaptive FilterDocument6 pagesNoise Canceling in Audio Signal With Adaptive FilterDiệp Xuân NamNo ratings yet
- All Adaptive Filter AlgorithmsDocument9 pagesAll Adaptive Filter AlgorithmsAkilesh MDNo ratings yet
- Noise Cancellation Using Adaptive FilteringDocument6 pagesNoise Cancellation Using Adaptive FilteringHafizNo ratings yet
- Echo Cancellation Using The Lms AlgorithmDocument8 pagesEcho Cancellation Using The Lms AlgorithmVương Công ĐịnhNo ratings yet
- Chameli Devi Institute of Technology & Management, IndoreDocument15 pagesChameli Devi Institute of Technology & Management, IndoreNazsh AslamNo ratings yet
- Application of Adaptive FiltersDocument12 pagesApplication of Adaptive FiltersDollRaiNo ratings yet
- FULLTEXT01Document66 pagesFULLTEXT01Vishnu PriyaNo ratings yet
- SSN AssignmentDocument24 pagesSSN AssignmentShikha BhattNo ratings yet
- Block Diagram: Configuration of A System For Estimation of Frequency Wiener FilterDocument2 pagesBlock Diagram: Configuration of A System For Estimation of Frequency Wiener Filtereshwar_worldNo ratings yet
- Denoising Audio Signals Using MATLABDocument7 pagesDenoising Audio Signals Using MATLABDeepak ChandranNo ratings yet
- ANC System For Noisy SpeechDocument9 pagesANC System For Noisy SpeechsipijNo ratings yet
- Sound Engineering PDFDocument16 pagesSound Engineering PDFkskumargieNo ratings yet
- Noise6 PDFDocument16 pagesNoise6 PDFkskumargieNo ratings yet
- I. Adaptive Echo Cancellation: ABSTRACT: Echo Is The Repetition of A Waveform Due To Reflection From Points WhereDocument10 pagesI. Adaptive Echo Cancellation: ABSTRACT: Echo Is The Repetition of A Waveform Due To Reflection From Points WheresreedeviishNo ratings yet
- JBL Professional Sound System Design Manual - 1999 Edition (Pt.2)Document44 pagesJBL Professional Sound System Design Manual - 1999 Edition (Pt.2)Morris Alexander100% (1)
- ANCDocument24 pagesANCManish GaurNo ratings yet
- Noise Control: Passive Noise Control (PNC) :-Passive Noise Control Is Sound Reduction byDocument15 pagesNoise Control: Passive Noise Control (PNC) :-Passive Noise Control Is Sound Reduction byTridev PadhiNo ratings yet
- 39 48Document10 pages39 48Sasan Ahdi RezaeiehNo ratings yet
- Dual Microphone Adaptive Noise Reduction Software: White PaperDocument8 pagesDual Microphone Adaptive Noise Reduction Software: White PaperPfjungle DropNo ratings yet
- Bannari AmmanDocument4 pagesBannari AmmanJabeena AfthabNo ratings yet
- Acoustic Echo CancellationDocument16 pagesAcoustic Echo CancellationsarbasNo ratings yet
- Echo Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoDocument25 pagesEcho Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoÈmøñ AlesandЯo KhanNo ratings yet
- Glossary 2Document12 pagesGlossary 2khadidjaNo ratings yet
- 2017 A New FXLMS Algorithm With Offline and Online Secondary-Path Modeling Scheme For Active Noise Control of Power TransformersDocument11 pages2017 A New FXLMS Algorithm With Offline and Online Secondary-Path Modeling Scheme For Active Noise Control of Power TransformersYen Ou-YangNo ratings yet
- Multichannel Acoustic Echo Cancellation in Multiparty Spatial Audio Conferencing With Constrained Kalman FilteringDocument4 pagesMultichannel Acoustic Echo Cancellation in Multiparty Spatial Audio Conferencing With Constrained Kalman FilteringRaghavendra TirlapurNo ratings yet
- Echo Cancellation in Audio Signal Using LMS AlgorithmDocument6 pagesEcho Cancellation in Audio Signal Using LMS AlgorithmVa SuNo ratings yet
- Design and Implementation of Real Time Electronic Stethoscope With A Method For Separating Heart Sound From Lung Sound Using TMS320C6713 DSKDocument12 pagesDesign and Implementation of Real Time Electronic Stethoscope With A Method For Separating Heart Sound From Lung Sound Using TMS320C6713 DSKrajkumarpaniNo ratings yet
- EWGAE 2010: Intelligent AE Signal Filtering MethodsDocument6 pagesEWGAE 2010: Intelligent AE Signal Filtering Methodsvassili_iuNo ratings yet
- SpectrogramDocument17 pagesSpectrogramShanmugaraj VskNo ratings yet
- World's Largest Science, Technology & Medicine Open Access Book PublisherDocument38 pagesWorld's Largest Science, Technology & Medicine Open Access Book PublisherSanti AgoNo ratings yet
- Adaptive FilterDocument23 pagesAdaptive FilterAbdi TeferiNo ratings yet
- DSP 5Document32 pagesDSP 5Jayan GoelNo ratings yet
- Echo CancellationDocument19 pagesEcho Cancellationbrittoajay43100% (1)
- A Design For Active Noise Cancellation in The 2Cc CouplerDocument4 pagesA Design For Active Noise Cancellation in The 2Cc CouplerAnuroop G RaoNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Noise Reduction: Enhancing Clarity, Advanced Techniques for Noise Reduction in Computer VisionFrom EverandNoise Reduction: Enhancing Clarity, Advanced Techniques for Noise Reduction in Computer VisionNo ratings yet
- Operational Amplifier Noise: Techniques and Tips for Analyzing and Reducing NoiseFrom EverandOperational Amplifier Noise: Techniques and Tips for Analyzing and Reducing NoiseRating: 5 out of 5 stars5/5 (1)
- Filter Bank: Insights into Computer Vision's Filter Bank TechniquesFrom EverandFilter Bank: Insights into Computer Vision's Filter Bank TechniquesNo ratings yet
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)