You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Tableau Cheat Sheet 25 Feb 2014 PDocument5 pagesTableau Cheat Sheet 25 Feb 2014 Pjjlorika100% (1)
- Pair TradingDocument1 pagePair Tradingoctaveyahoo100% (1)
- Introduction To Nba 16 NovDocument32 pagesIntroduction To Nba 16 Novdebasishmee5808No ratings yet
- U Boot AbcdgeDocument232 pagesU Boot AbcdgeDineshkumarparamesNo ratings yet
- Storage Devices: Powerpoint Presentation OnDocument27 pagesStorage Devices: Powerpoint Presentation Onmikesam100% (1)
- Electromagnetic Field TheoryDocument3 pagesElectromagnetic Field Theorydebasishmee5808No ratings yet
- LTE Theory To Practice-KPI Optimization (A 4G Wireless Technology)Document20 pagesLTE Theory To Practice-KPI Optimization (A 4G Wireless Technology)amanagarwal16No ratings yet
- Bhimbra-Generalized Theory Electrical MachinesDocument10 pagesBhimbra-Generalized Theory Electrical Machinesdebasishmee5808No ratings yet
- RID 1 ModrobDocument4 pagesRID 1 ModrobbalakaleesNo ratings yet
- nRF24L01P Product Specification 1 0Document78 pagesnRF24L01P Product Specification 1 0CaelumBlimpNo ratings yet
- Adjunct 2Document5 pagesAdjunct 2debasishmee5808No ratings yet
- TrademarksDocument1 pageTrademarksDhyan SwaroopNo ratings yet
- RID 1 ModrobDocument6 pagesRID 1 Modrobdebasishmee5808No ratings yet
- Extramural Funding2012-13Document2 pagesExtramural Funding2012-13debasishmee5808No ratings yet
- Adaptive Control of Linearizable Systems: Fully-StateDocument9 pagesAdaptive Control of Linearizable Systems: Fully-Statedebasishmee5808No ratings yet
- Book ListDocument6 pagesBook Listdebasishmee58080% (1)
- Control SystemDocument22 pagesControl SystemKamran RazaNo ratings yet
- 10 1109@91 481843Document12 pages10 1109@91 481843debasishmee5808No ratings yet
- T Year B.tech Sylla1sbus Revised 18.08.10Document33 pagesT Year B.tech Sylla1sbus Revised 18.08.10Manoj KarmakarNo ratings yet
- Sophus 3Document1 pageSophus 3debasishmee5808No ratings yet
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808No ratings yet
- Lec 1Document18 pagesLec 1cavanzasNo ratings yet
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808No ratings yet
- Duplicate Doc Diploma CertiDocument1 pageDuplicate Doc Diploma Certidebasishmee5808No ratings yet
- Graphical AbstractDocument2 pagesGraphical Abstractdebasishmee5808No ratings yet
- Control System - I: Weekly Lesson PlanDocument5 pagesControl System - I: Weekly Lesson Plandebasishmee5808No ratings yet
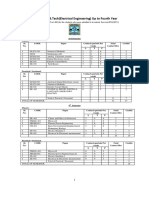
- Syllabus For B.Tech (Electrical Engineering) Up To Fourth YearDocument67 pagesSyllabus For B.Tech (Electrical Engineering) Up To Fourth YearDr. Kaushik MandalNo ratings yet
- 2 14 24Document11 pages2 14 24debasishmee5808No ratings yet
- Lec 2Document25 pagesLec 2debasishmee5808No ratings yet
- Best Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New DelhiDocument24 pagesBest Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New Delhidebasishmee5808No ratings yet
- Lec 1Document18 pagesLec 1cavanzasNo ratings yet
- Comparison Between Integer Order and Fractional Order ControllersDocument6 pagesComparison Between Integer Order and Fractional Order Controllersdebasishmee5808No ratings yet
- Time ManagementDocument19 pagesTime ManagementShyam_Nair_9667No ratings yet
- User Account Management: Weesan LeeDocument19 pagesUser Account Management: Weesan LeegeongeoNo ratings yet
- Panasonic XDP Flex ButtonsDocument3 pagesPanasonic XDP Flex ButtonsBrana MitrovićNo ratings yet
- C Questions and AnswersDocument76 pagesC Questions and AnswersRaj SnehaNo ratings yet
- Cubase 5Document37 pagesCubase 5lclaassenNo ratings yet
- Appendix 24 Daily Time Record DTRDocument1 pageAppendix 24 Daily Time Record DTREzekiel Timola CariñoNo ratings yet
- Explains-Complete Process of Web E - Way BillDocument9 pagesExplains-Complete Process of Web E - Way BillNagaNo ratings yet
- SBT Reference ManualDocument517 pagesSBT Reference ManualrudiansenNo ratings yet
- Abb Irb 6700Document574 pagesAbb Irb 6700rx7000100% (1)
- OS_ISO_CollectionDocument10 pagesOS_ISO_CollectionWin TecNo ratings yet
- AntelopeDocument71 pagesAntelopeMarian Jusko0% (1)
- Maidanam Chalam PDFDocument2 pagesMaidanam Chalam PDFNarasimha CNo ratings yet
- Open Source Linux Apache Mysql PHPDocument27 pagesOpen Source Linux Apache Mysql PHPcharuvimal786No ratings yet
- Infraworks 360 Pro QADocument7 pagesInfraworks 360 Pro QAdoradodoradoNo ratings yet
- Delhi Public School, Ranchi Report File Computer ScienceDocument34 pagesDelhi Public School, Ranchi Report File Computer ScienceSanya SinhaNo ratings yet
- Hspice RFDocument452 pagesHspice RFSandeep SriramNo ratings yet
- Labureader Plus 2: Semi-Automated Urine Chemistry AnalyzerDocument2 pagesLabureader Plus 2: Semi-Automated Urine Chemistry AnalyzerCARLOSNo ratings yet
- Ansys Fensap-Ice ViewmericalDocument66 pagesAnsys Fensap-Ice ViewmericalEDIZONNo ratings yet
- KX DRIVER v75 ReadMe PDFDocument11 pagesKX DRIVER v75 ReadMe PDFДражен ЈовићNo ratings yet
- Midterm QuestionsDocument5 pagesMidterm Questionsapi-300838237No ratings yet
- Load FlowDocument5 pagesLoad FlowRajatAgrawalNo ratings yet
- D67234GC20 Les06Document47 pagesD67234GC20 Les06Pedro AlMatNo ratings yet
- Function As Subprogram and Modular ProgrammingDocument12 pagesFunction As Subprogram and Modular ProgrammingFrancis Gutierrez BalazonNo ratings yet
- Loveena: Curriculum VitaeDocument4 pagesLoveena: Curriculum VitaeEr LoveenaNo ratings yet
- My Learning Journey ReflectionDocument2 pagesMy Learning Journey Reflectionapi-486217715No ratings yet