You might also like
- A Novel Polymer To Create A New Approach of Hole Cleaning. Iptc-20122-AbstractDocument10 pagesA Novel Polymer To Create A New Approach of Hole Cleaning. Iptc-20122-Abstractمحمد مريف حسن الربعي (Mohammed M H Al Rubaii)No ratings yet
- Applied Drilling Circulation Systems: Hydraulics, Calculations and ModelsFrom EverandApplied Drilling Circulation Systems: Hydraulics, Calculations and ModelsRating: 5 out of 5 stars5/5 (4)
- Deepwater DrillingDocument13 pagesDeepwater DrillingWaraey100% (1)
- Site Safety Handbook for the Petroleum IndustryFrom EverandSite Safety Handbook for the Petroleum IndustryRating: 5 out of 5 stars5/5 (1)
- Semi Automatic Bearing Cleaning MachineDocument4 pagesSemi Automatic Bearing Cleaning MachineSourabh KambleNo ratings yet
- Practical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsFrom EverandPractical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsRating: 5 out of 5 stars5/5 (1)
- Chapter 1-5Document54 pagesChapter 1-5Abah FarisNo ratings yet
- Fundamentals of Horizontal Wellbore Cleanout: Theory and Applications of Rotary Jetting TechnologyFrom EverandFundamentals of Horizontal Wellbore Cleanout: Theory and Applications of Rotary Jetting TechnologyNo ratings yet
- Chute DesignDocument11 pagesChute DesignneilNo ratings yet
- Drilling Bit Optimisation PDFDocument107 pagesDrilling Bit Optimisation PDFRyan LlanetaNo ratings yet
- Resumo Alargado ImprimirDocument10 pagesResumo Alargado Imprimirumesh deshmukhNo ratings yet
- Career Change From Real Estate to Oil and Gas ProjectsFrom EverandCareer Change From Real Estate to Oil and Gas ProjectsRating: 5 out of 5 stars5/5 (1)
- Texas AM PDFDocument43 pagesTexas AM PDFJorgito AriasNo ratings yet
- Damages on Pumps and Systems: The Handbook for the Operation of Centrifugal PumpsFrom EverandDamages on Pumps and Systems: The Handbook for the Operation of Centrifugal PumpsRating: 4.5 out of 5 stars4.5/5 (2)
- Feng2013 PDFDocument12 pagesFeng2013 PDFAmr HegazyNo ratings yet
- IPTC 16616 A Case Study: Innovative Open Hole Well Completion Provides Superior Results in Tight Gas Formation in Jilin District, ChinaDocument12 pagesIPTC 16616 A Case Study: Innovative Open Hole Well Completion Provides Superior Results in Tight Gas Formation in Jilin District, ChinaAmr HegazyNo ratings yet
- Wall Climbing Robot ProjectReportDocument37 pagesWall Climbing Robot ProjectReportGanesh ReddyNo ratings yet
- Prospects For The Use of Technology of Rotary Steerable Systems For The Directional DrillingDocument7 pagesProspects For The Use of Technology of Rotary Steerable Systems For The Directional DrillingAl-Shargabi MohaNo ratings yet
- Robot For Boiler Header Inspection "LS-01": Procedia Engineering December 2012Document8 pagesRobot For Boiler Header Inspection "LS-01": Procedia Engineering December 2012Jason RichardsonNo ratings yet
- Inventory Management Study at Chettinad CementDocument70 pagesInventory Management Study at Chettinad CementmbaboopathiNo ratings yet
- Automatic Cleaning System For Over Head TankDocument44 pagesAutomatic Cleaning System For Over Head TankANAND KRISHNAN100% (2)
- Automated Evaluation of Hole Cleaning Efficiency While Drilling Improves. Iptc-19809-MsDocument17 pagesAutomated Evaluation of Hole Cleaning Efficiency While Drilling Improves. Iptc-19809-Msمحمد مريف حسن الربعي (Mohammed M H Al Rubaii)No ratings yet
- pipe-inspection-cleaning-robotDocument96 pagespipe-inspection-cleaning-robotAttila NagyNo ratings yet
- Plastic Injection Molding MachineDocument21 pagesPlastic Injection Molding MachineAbel MeketaNo ratings yet
- Est Micro ProjectDocument14 pagesEst Micro ProjectTanmay PatilNo ratings yet
- MikiasDocument32 pagesMikiasMikî MańNo ratings yet
- Production Logging Techniques and Interpretation of Resulted Figure: A Case Study of A Gas Field IranDocument18 pagesProduction Logging Techniques and Interpretation of Resulted Figure: A Case Study of A Gas Field IranAntonio BarbaNo ratings yet
- Absorption & StrippingDocument875 pagesAbsorption & StrippingM Manas Manohar85% (54)
- Belt GrinderDocument17 pagesBelt GrinderFelipe IgnazioNo ratings yet
- Department of Technical EducationDocument14 pagesDepartment of Technical EducationManoj insulkarNo ratings yet
- Steam Press Project Rview ReportDocument19 pagesSteam Press Project Rview Reportअंकित चौधरीNo ratings yet
- Sewage Treatment ProcessDocument111 pagesSewage Treatment ProcessJinka Sreenath100% (7)
- Interior Pipe Mountaineering Device Assessment Robot: Muhammad Shurjeel Amjad and Salman AhmadDocument7 pagesInterior Pipe Mountaineering Device Assessment Robot: Muhammad Shurjeel Amjad and Salman AhmadSahadev RoyNo ratings yet
- Areas of ApplicationDocument9 pagesAreas of ApplicationRajeesh JNo ratings yet
- Department of Chemical EngineeringDocument14 pagesDepartment of Chemical EngineeringEtsham AmjadNo ratings yet
- Multi Nut RemoverDocument42 pagesMulti Nut Removerarun kumar100% (5)
- Drilling Fluids W181Document70 pagesDrilling Fluids W181Shamia Essam100% (1)
- Borehole StabilityDocument31 pagesBorehole StabilityVedanti BardeNo ratings yet
- Vocational Training Report 3Document37 pagesVocational Training Report 3Suraj sahuNo ratings yet
- Makerspace 5.0 - Team Chemical - AnilineDocument31 pagesMakerspace 5.0 - Team Chemical - Anilinehkharshal064No ratings yet
- Piston Damage ReportDocument71 pagesPiston Damage ReportQamar Uz Zaman100% (2)
- Chapter 1Document54 pagesChapter 1m90abdelwahabNo ratings yet
- Industrial Pipe Cleaning and Inspection RobotDocument11 pagesIndustrial Pipe Cleaning and Inspection Robotn pallaviNo ratings yet
- Method Statement CoringDocument3 pagesMethod Statement CoringMirza Farouq BegNo ratings yet
- Production Logging Techniques and Interpretation of Resulted Figure: A Case Study of A Gas Field IranDocument18 pagesProduction Logging Techniques and Interpretation of Resulted Figure: A Case Study of A Gas Field IranTheNourEldenNo ratings yet
- Modelling of Fluid Sloshing in Tank 77Document20 pagesModelling of Fluid Sloshing in Tank 77Dipankar NathNo ratings yet
- PEM 3 PROJECT - EditDocument14 pagesPEM 3 PROJECT - Editjoanaajuna01No ratings yet
- 316 - Recent Advances in Overburden and Down-The-Hole Drilling TechniquesDocument10 pages316 - Recent Advances in Overburden and Down-The-Hole Drilling Techniquessoja2009No ratings yet
- CLSI Vacuum Design Specification 8-4-33 - 1Document13 pagesCLSI Vacuum Design Specification 8-4-33 - 1ScribdUser11235No ratings yet
- PPDF - Estad23 - 206 - Robotic Safety SlideDocument6 pagesPPDF - Estad23 - 206 - Robotic Safety Slidefrittella pNo ratings yet
- Rod Lift Offshore SafetyDocument7 pagesRod Lift Offshore SafetyMohamed GhareebNo ratings yet
- Optimize Distillation Column DesignDocument26 pagesOptimize Distillation Column Designlutfi awn100% (1)
- Oil, Water, Solid and Clay Content Determination in Various Concentration of BentoniteDocument8 pagesOil, Water, Solid and Clay Content Determination in Various Concentration of BentoniteKshitij SoniNo ratings yet
- Design and Cost Comparison of Extended Aeration and SAFF for Domestic Wastewater TreatmentDocument66 pagesDesign and Cost Comparison of Extended Aeration and SAFF for Domestic Wastewater TreatmentSiddhant KaushikNo ratings yet
- Belt CleanerDocument16 pagesBelt CleanerJosue21SNo ratings yet
- CT AcidizingDocument5 pagesCT AcidizingSodaCat CateNo ratings yet
- Real Time Automation of Cutting Carrying Capacity Index To Predict Hole. Spe-206235-MsDocument6 pagesReal Time Automation of Cutting Carrying Capacity Index To Predict Hole. Spe-206235-Msمحمد مريف حسن الربعي (Mohammed M H Al Rubaii)No ratings yet
- New 2010 CPR GuidelinesDocument3 pagesNew 2010 CPR GuidelinesReph ChunHoongNo ratings yet
- Analysis Paper 2 (97 - 07)Document8 pagesAnalysis Paper 2 (97 - 07)Reph ChunHoongNo ratings yet
- Physics Dictionary (Edu - Joshuatly.com)Document15 pagesPhysics Dictionary (Edu - Joshuatly.com)Rosdy DyingdemonNo ratings yet
- Aqa 5421 Wre Jan01Document9 pagesAqa 5421 Wre Jan01Reph ChunHoongNo ratings yet
- Non Conventional Energy SourcesDocument40 pagesNon Conventional Energy SourcesPriyanka Vedula100% (1)
- Primary PetrolDocument2 pagesPrimary PetrolHarikesa KalasilvanNo ratings yet
- Petrobangla Report 2015Document72 pagesPetrobangla Report 2015Momotaz KhatunNo ratings yet
- Shale Gas From Conventional Reservoirs To Unconventional ReservoirsDocument3 pagesShale Gas From Conventional Reservoirs To Unconventional Reservoirssaa6383No ratings yet
- Drilling CompaniesDocument42 pagesDrilling CompaniesEngineer AlviNo ratings yet
- Reinstatement Punch List Form - 1Document1 pageReinstatement Punch List Form - 1Mathias OnosemuodeNo ratings yet
- FPSO Facilities: Processing Oil and Gas OffshoreDocument30 pagesFPSO Facilities: Processing Oil and Gas OffshoreJogi100% (1)
- Sabah TalismanDocument18 pagesSabah TalismanAhmad ImranNo ratings yet
- FDocument3 pagesFjeas grejoy andrewsNo ratings yet
- Map of Natural Gas Pipelines and Oil RefineriesDocument1 pageMap of Natural Gas Pipelines and Oil RefineriesSouthern California Public RadioNo ratings yet
- Nomenclacture MaseralDocument23 pagesNomenclacture Maseralputri aprilliaNo ratings yet
- Organic Chemistry Ch. 4-Alkanes & CycloalkanesDocument40 pagesOrganic Chemistry Ch. 4-Alkanes & CycloalkanesThanh thảo TrịnhNo ratings yet
- Instruction Manual For Thruster Unit: Chevron Multifak Ep 2Document1 pageInstruction Manual For Thruster Unit: Chevron Multifak Ep 2john smithNo ratings yet
- Bitumen Price List Wef 01.06.2019Document1 pageBitumen Price List Wef 01.06.2019P. Balaji Chakravarthy67% (3)
- Refinery EconomicsDocument4 pagesRefinery Economicsgouja_rabiiNo ratings yet
- Alawad BookDocument8 pagesAlawad BookSaid DjaballahNo ratings yet
- Recommended Oil and Grease Cross Reference ChartDocument1 pageRecommended Oil and Grease Cross Reference Chartnanjay33% (3)
- Chevron - PDS - Compressor Oils - CetusPAG - v1019Document2 pagesChevron - PDS - Compressor Oils - CetusPAG - v1019Jicheng PiaoNo ratings yet
- Wartsila PDFDocument12 pagesWartsila PDFfreddy ogiNo ratings yet
- Key Coal TrendsDocument22 pagesKey Coal Trendsفردوس سليمانNo ratings yet
- David Ghambashidze. Caucasian Petroleum Industry and Its Importance For Eastern Europe and Asia. The Anglo-Georgian Society, London, 1918Document40 pagesDavid Ghambashidze. Caucasian Petroleum Industry and Its Importance For Eastern Europe and Asia. The Anglo-Georgian Society, London, 1918George T-MNo ratings yet
- Viking Energy PresentationDocument8 pagesViking Energy PresentationansarALLAAHNo ratings yet
- Bitumen & FO Price Rate 16.03.2021Document1 pageBitumen & FO Price Rate 16.03.2021Dontha VenkateshNo ratings yet
- Stabilizing Effect of BioheaviesDocument4 pagesStabilizing Effect of Bioheavieskarim.rashidmaneshNo ratings yet
- Pipeline Magazine ExampleDocument56 pagesPipeline Magazine ExamplePeter FormanNo ratings yet
- Fischer-Tropsch Process: Reaction Mechanism Feedstocks: GasificationDocument12 pagesFischer-Tropsch Process: Reaction Mechanism Feedstocks: GasificationCarlosNo ratings yet
- Compilation of FPSOs and FSUs (OGP)Document9 pagesCompilation of FPSOs and FSUs (OGP)Zatul ZiadiNo ratings yet
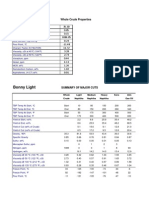
- Bonny LightDocument6 pagesBonny LightMetchaoaNo ratings yet