You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Tutorial 3 ResonanceDocument4 pagesTutorial 3 ResonanceEyad A. FeilatNo ratings yet
- Tutorial 4 CT VTDocument3 pagesTutorial 4 CT VTEyad A. FeilatNo ratings yet
- Topic MCCBDocument10 pagesTopic MCCBEyad A. FeilatNo ratings yet
- Topic MCBDocument6 pagesTopic MCBEyad A. FeilatNo ratings yet
- Tutorial 2 StabilityDocument8 pagesTutorial 2 StabilityEyad A. Feilat100% (2)
- Review Questions Im SGDocument3 pagesReview Questions Im SGEyad A. FeilatNo ratings yet
- Series Parallel CKTDocument5 pagesSeries Parallel CKTEyad A. FeilatNo ratings yet
- Resonance ExamplesDocument2 pagesResonance ExamplesEyad A. Feilat0% (1)
- Power-Harmonics-Nonsinusoidal Systems PDFDocument44 pagesPower-Harmonics-Nonsinusoidal Systems PDFEyad A. FeilatNo ratings yet
- Tutorial Synch GeneratorDocument4 pagesTutorial Synch GeneratorEyad A. FeilatNo ratings yet
- Harmonics PDFDocument3 pagesHarmonics PDFEyad A. FeilatNo ratings yet
- Tutorial 1-Economic DispatchDocument5 pagesTutorial 1-Economic DispatchEyad A. FeilatNo ratings yet
- AuditDocument17 pagesAuditwinrayesNo ratings yet
- Tutorial Load C-C PDFDocument3 pagesTutorial Load C-C PDFEyad A. FeilatNo ratings yet
- Tutorial IMDocument7 pagesTutorial IMEyad A. FeilatNo ratings yet
- Tutoria 1 PH Induction MotorDocument2 pagesTutoria 1 PH Induction MotorEyad A. FeilatNo ratings yet
- Si CrystalDocument26 pagesSi CrystalEyad A. FeilatNo ratings yet
- RBF BP JieeecDocument5 pagesRBF BP JieeecEyad A. FeilatNo ratings yet
- Miller IndicesDocument22 pagesMiller IndicesEyad A. FeilatNo ratings yet
- Chapter 2Document9 pagesChapter 2Eyad A. FeilatNo ratings yet
- Fault Calculation TutorialDocument4 pagesFault Calculation TutorialEyad A. FeilatNo ratings yet
- Chapter3 IIDocument9 pagesChapter3 IIEyad A. FeilatNo ratings yet
- Chapter 1Document4 pagesChapter 1Eyad A. FeilatNo ratings yet
- FiltersDocument27 pagesFiltersEyad A. FeilatNo ratings yet
- Shering BridgeDocument7 pagesShering BridgeEyad A. FeilatNo ratings yet
- Micro ActuatorsDocument10 pagesMicro ActuatorsEyad A. FeilatNo ratings yet
- 3-EPE452 - Induction Motors-3Ph PDFDocument87 pages3-EPE452 - Induction Motors-3Ph PDFEyad A. FeilatNo ratings yet
- OC ProtectionDocument17 pagesOC ProtectionEyad A. FeilatNo ratings yet
- Economic Dispatch OptimizationDocument39 pagesEconomic Dispatch OptimizationEyad A. FeilatNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2015 Catalog PreviewDocument31 pages2015 Catalog PreviewrandomNo ratings yet
- OUSL Sri Lanka Bachelor's Engineering Assignment on Electrical MachinesDocument3 pagesOUSL Sri Lanka Bachelor's Engineering Assignment on Electrical MachinesDilshanNo ratings yet
- Speed Control of DC MotorDocument4 pagesSpeed Control of DC MotorjitbakNo ratings yet
- Syncronous MotorDocument22 pagesSyncronous MotorSambhav JainNo ratings yet
- BEEE Unit3 Part 1 - DC Motors NotesDocument20 pagesBEEE Unit3 Part 1 - DC Motors NotesShreyash SargarNo ratings yet
- BACK EmfDocument12 pagesBACK Emfarshad_rcciitNo ratings yet
- TC2-Cross Reference Table For Standards On Rotating MachineryDocument4 pagesTC2-Cross Reference Table For Standards On Rotating MachineryNguyenBaCuocNo ratings yet
- ABB Price Book 767Document1 pageABB Price Book 767EliasNo ratings yet
- BMECEE 307 - ELECTRICAL AND ELECTRONICS TECHNOLOGYDocument5 pagesBMECEE 307 - ELECTRICAL AND ELECTRONICS TECHNOLOGYashwen30No ratings yet
- Transformer Substation PК RMU 10 (20) /0.4 kV up to 800 kVA Single Line DiagramDocument12 pagesTransformer Substation PК RMU 10 (20) /0.4 kV up to 800 kVA Single Line DiagramVinod ViparNo ratings yet
- Variable Voltage & Frequency Controlled 3 Phase Induction MotorDocument6 pagesVariable Voltage & Frequency Controlled 3 Phase Induction MotorNAVEED ISHRAQNo ratings yet
- Three Phase Synchronous MachinesDocument41 pagesThree Phase Synchronous MachinesMausam BasnetNo ratings yet
- Electric Machines Laboratory Report-Eee371: To Determine The Turn Ratio of A TransformerDocument5 pagesElectric Machines Laboratory Report-Eee371: To Determine The Turn Ratio of A TransformerKashif ZamanNo ratings yet
- DELMO - EE 023 - DC Machine Design v3Document16 pagesDELMO - EE 023 - DC Machine Design v3Hok HokNo ratings yet
- Cores DatasheetDocument45 pagesCores DatasheetGigi KentNo ratings yet
- Transformer BookDocument86 pagesTransformer BookHari Shankar KumawatNo ratings yet
- 3 +Ok+Direct+Axis+and+Quadrature+Axis+Subtransient+ReactancesDocument2 pages3 +Ok+Direct+Axis+and+Quadrature+Axis+Subtransient+Reactancesnainesh goteNo ratings yet
- Lecture10 - Selection of Phases, Poles, Stator & Rotor SlotsDocument19 pagesLecture10 - Selection of Phases, Poles, Stator & Rotor Slotsramaswamykama786No ratings yet
- Cairo North Power Station Electrical Maintenance DivisionDocument103 pagesCairo North Power Station Electrical Maintenance DivisionputrasejahtraNo ratings yet
- Research On A Slide-Contact Type Linear Electromagnetic CatapultDocument5 pagesResearch On A Slide-Contact Type Linear Electromagnetic Catapultbryan andres mora ramosNo ratings yet
- Return To Index Parts List MotorDocument1 pageReturn To Index Parts List Motorcmaradiaga0% (1)
- EE2257 Lab ManualDocument105 pagesEE2257 Lab ManualPrakash Chandran CNo ratings yet
- Am Electrical Nescom Indution 786Document4 pagesAm Electrical Nescom Indution 786Muhammad WaseemNo ratings yet
- Permanent Magnet Stepper MotorsDocument3 pagesPermanent Magnet Stepper MotorsMuhammad Rizwan AslamNo ratings yet
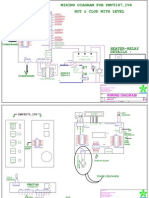
- Wiring Diagram For Pmv5187 - 1V8 Hot & Clod With Level: Load SectionDocument4 pagesWiring Diagram For Pmv5187 - 1V8 Hot & Clod With Level: Load Sectionsameer050680No ratings yet
- White Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2Document13 pagesWhite Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2tekhakkoNo ratings yet
- Transformer and Inductor Design Handbook Chapter 19Document10 pagesTransformer and Inductor Design Handbook Chapter 19Brijendra VermaNo ratings yet
- M35SP-9, - 10N: Stepping MotorsDocument2 pagesM35SP-9, - 10N: Stepping MotorsEmilioTSNo ratings yet
- Motor Overheating CausesDocument3 pagesMotor Overheating CauseszhangyiliNo ratings yet
- Starting and Speed Control MethodsDocument20 pagesStarting and Speed Control MethodsRajeev ValunjkarNo ratings yet