You might also like
- Hypothalamus and Pituitary Gland: Master Regulators of HormonesDocument5 pagesHypothalamus and Pituitary Gland: Master Regulators of HormonesLiv LeysonNo ratings yet
- BNC Lesson 1-4Document34 pagesBNC Lesson 1-4Alyssa LoisNo ratings yet
- Fault Calculation TutorialDocument4 pagesFault Calculation TutorialEyad A. FeilatNo ratings yet
- LADBS - Swimming PoolsDocument43 pagesLADBS - Swimming PoolsMichael James100% (1)
- Lecture 4A SignalConditioning DCBRIDGE SVDocument48 pagesLecture 4A SignalConditioning DCBRIDGE SVFazdrul AkiffNo ratings yet
- 526Document13 pages526jeas grejoy andrewsNo ratings yet
- Tutorial 1-Economic DispatchDocument5 pagesTutorial 1-Economic DispatchEyad A. FeilatNo ratings yet
- Tutorial 2 StabilityDocument8 pagesTutorial 2 StabilityEyad A. Feilat100% (2)
- Biomedical Sensors PDFDocument14 pagesBiomedical Sensors PDFBMT0% (1)
- Haider 2008Document4 pagesHaider 2008juan cardonaNo ratings yet
- EDC MAUALdDocument98 pagesEDC MAUALdsrinivaskaredlaNo ratings yet
- Experiment 4 AC Measurents RC A RL Ckts 210330Document7 pagesExperiment 4 AC Measurents RC A RL Ckts 210330MK MillyNo ratings yet
- Chapter 2-Webster Basic Sensors and PrinciplesDocument60 pagesChapter 2-Webster Basic Sensors and PrinciplesgeorgebersNo ratings yet
- Week Data AcquisitionDocument50 pagesWeek Data AcquisitionAnonymous oUoJ4A8xNo ratings yet
- R-L & R-C CircuitsDocument41 pagesR-L & R-C CircuitsAlamgir Kabir ShuvoNo ratings yet
- Case Study: Complex Impedance: Electronic FiltersDocument4 pagesCase Study: Complex Impedance: Electronic FiltersDaniel SolhNo ratings yet
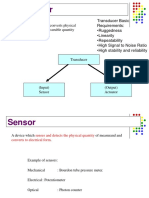
- TransducerDocument34 pagesTransducerVicky VishwakarmaNo ratings yet
- ,,,,CNT Lab ReportDocument13 pages,,,,CNT Lab ReportHosea MuchiriNo ratings yet
- Basics of Microwave MeasurementsDocument18 pagesBasics of Microwave MeasurementsPrashanth KumarNo ratings yet
- Sensor - And.actuator - Course.lecture 3.V2. (HJB - Edited.11.april.2014) .Part.1Document44 pagesSensor - And.actuator - Course.lecture 3.V2. (HJB - Edited.11.april.2014) .Part.1hannyjberchmans-1No ratings yet
- Case Study: Complex Impedance: Electronic FiltersDocument4 pagesCase Study: Complex Impedance: Electronic FiltersEbookcrazeNo ratings yet
- Live Load ExampleDocument9 pagesLive Load ExampleAnonymous ep7LE5ZdP5No ratings yet
- Biomedical Instrumentation: Prof. Dr. Nizamettin AYDINDocument81 pagesBiomedical Instrumentation: Prof. Dr. Nizamettin AYDINAbraiz Khan KhattakNo ratings yet
- App 4 LaplaceDocument6 pagesApp 4 LaplaceRycille AlayanNo ratings yet
- Alternating Current CircuitsDocument8 pagesAlternating Current CircuitsShafiq HafizullahNo ratings yet
- Lecture 6 - TransducersDocument58 pagesLecture 6 - TransducersKOFI BROWNNo ratings yet
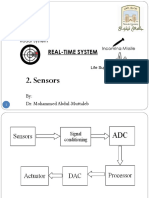
- 2 SensorDocument64 pages2 Sensorحساب ويندوزNo ratings yet
- Explore Time & Freq Responses of RLC CircuitsDocument8 pagesExplore Time & Freq Responses of RLC CircuitsRudra MishraNo ratings yet
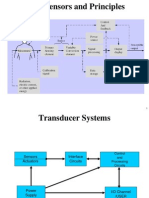
- Basic Sensors and PrinciplesDocument80 pagesBasic Sensors and Principlesmparanthaman2No ratings yet
- 18.03 Pset 5 PDFDocument23 pages18.03 Pset 5 PDFJustin CollinsNo ratings yet
- Signl 2pptDocument137 pagesSignl 2pptRavikant Sharma100% (1)
- Lab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsDocument10 pagesLab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsLeandro ArvattiNo ratings yet
- Assignment TheoryDocument11 pagesAssignment TheoryChomfwix VlogsNo ratings yet
- Lecture 4: Small-Signal Diode Model and Its ApplicationDocument9 pagesLecture 4: Small-Signal Diode Model and Its Application9013227246No ratings yet
- What is a PCB? The basics of printed circuit boardsDocument61 pagesWhat is a PCB? The basics of printed circuit boardsDharma LingamNo ratings yet
- Daycounter Inc - Snubber Circuit Design CalculatorsDocument5 pagesDaycounter Inc - Snubber Circuit Design CalculatorsLaercio Marques100% (1)
- MOSFET Amplifier Analysis and Design in Different ConfigurationsDocument10 pagesMOSFET Amplifier Analysis and Design in Different Configurationsmani_vlsiNo ratings yet
- Active FiltersDocument11 pagesActive FiltersmakreloadedNo ratings yet
- Understanding Attenuators and Compensation: R R V R V R R R V VDocument7 pagesUnderstanding Attenuators and Compensation: R R V R V R R R V Vnithinjose4uNo ratings yet
- Experiment 2 - Vector Network Analyzer MeasurementDocument25 pagesExperiment 2 - Vector Network Analyzer MeasurementBadut234No ratings yet
- Lic Dec 2018 Ans PDFDocument24 pagesLic Dec 2018 Ans PDFVaibhavNo ratings yet
- Lab 2Document4 pagesLab 2Israr AhmadNo ratings yet
- Electronic ComponentsDocument19 pagesElectronic ComponentsgmnatigizawNo ratings yet
- RC Circuit Response Introduction & TheoryDocument6 pagesRC Circuit Response Introduction & TheoryMuhammad FarooqNo ratings yet
- RLC Circuit Responses: Overdamped, Underdamped & Critically DampedDocument4 pagesRLC Circuit Responses: Overdamped, Underdamped & Critically Dampedअमरेश झाNo ratings yet
- Eee Lab Report 8Document9 pagesEee Lab Report 8Sayeed MohammedNo ratings yet
- Analog Measuring InstrumentsDocument43 pagesAnalog Measuring Instrumentsmuvvala charithaNo ratings yet
- High Pass 145Document7 pagesHigh Pass 145ebasaytunoNo ratings yet
- Capacitor and Inductor Transient Response: ECE 270 Lab #4 Capacitors and InductorsDocument14 pagesCapacitor and Inductor Transient Response: ECE 270 Lab #4 Capacitors and InductorsAlex DixonNo ratings yet
- Report 3Document8 pagesReport 3Tuan NguyenNo ratings yet
- 04A Frequency ResponseDocument27 pages04A Frequency ResponsesarathsrnairNo ratings yet
- Electronic Devices Experiment 4Document13 pagesElectronic Devices Experiment 4ArvinALNo ratings yet
- ELE4111 Section 2bDocument17 pagesELE4111 Section 2bsachinchunilallNo ratings yet
- AC Circuits LAB 1Document4 pagesAC Circuits LAB 1sarsm56No ratings yet
- 07 - ART - Determination of Frequency Characteristics of High Voltage Dividers in Frequency DomainDocument4 pages07 - ART - Determination of Frequency Characteristics of High Voltage Dividers in Frequency DomainLove for gamesNo ratings yet
- STEADY EL. CURRENT AND CIRCUIT PROPERTIESDocument33 pagesSTEADY EL. CURRENT AND CIRCUIT PROPERTIESሀይደር ዶ.ርNo ratings yet
- Experiment # 1: Time and Frequency Responses of Series RLC CircuitsDocument6 pagesExperiment # 1: Time and Frequency Responses of Series RLC CircuitsJhonn HuamFloNo ratings yet
- H7128 SISS Lecture NotesDocument22 pagesH7128 SISS Lecture NotesToby KellyNo ratings yet
- Measuring the natural frequency of an RLC circuitDocument9 pagesMeasuring the natural frequency of an RLC circuitBarthélemy HoubenNo ratings yet
- L #3: D C A: Sfsu - E 301 - E L AB Iode Haracteristics and PplicationsDocument12 pagesL #3: D C A: Sfsu - E 301 - E L AB Iode Haracteristics and PplicationsRudra MishraNo ratings yet
- Snubber Circuit Design CalculatorsDocument3 pagesSnubber Circuit Design CalculatorsteomondoNo ratings yet
- Notes 20 AC20 MetersDocument5 pagesNotes 20 AC20 Metersummay rubabNo ratings yet
- Circuits Review P2Document44 pagesCircuits Review P2José CastilloNo ratings yet
- Introduction to Electronics Chapter 1Document36 pagesIntroduction to Electronics Chapter 1詹勳智No ratings yet
- Electronics Components: Characteristics and MeasurementsDocument19 pagesElectronics Components: Characteristics and Measurementssatyaveetr singh100% (1)
- Experiment 1 Objective:: Figure1-1 Light Emiting DiodeDocument53 pagesExperiment 1 Objective:: Figure1-1 Light Emiting DiodeSalmaAn MalikNo ratings yet
- Topic MCCBDocument10 pagesTopic MCCBEyad A. FeilatNo ratings yet
- Resonance ExamplesDocument2 pagesResonance ExamplesEyad A. Feilat0% (1)
- Topic MCBDocument6 pagesTopic MCBEyad A. FeilatNo ratings yet
- AuditDocument17 pagesAuditwinrayesNo ratings yet
- Series Parallel CKTDocument5 pagesSeries Parallel CKTEyad A. FeilatNo ratings yet
- Tutorial 3 ResonanceDocument4 pagesTutorial 3 ResonanceEyad A. FeilatNo ratings yet
- Power-Harmonics-Nonsinusoidal Systems PDFDocument44 pagesPower-Harmonics-Nonsinusoidal Systems PDFEyad A. FeilatNo ratings yet
- Tutorial Load C-C PDFDocument3 pagesTutorial Load C-C PDFEyad A. FeilatNo ratings yet
- Tutorial Synch GeneratorDocument4 pagesTutorial Synch GeneratorEyad A. FeilatNo ratings yet
- Harmonics PDFDocument3 pagesHarmonics PDFEyad A. FeilatNo ratings yet
- Tutorial IMDocument7 pagesTutorial IMEyad A. FeilatNo ratings yet
- Review Questions Im SGDocument3 pagesReview Questions Im SGEyad A. FeilatNo ratings yet
- Tutoria 1 PH Induction MotorDocument2 pagesTutoria 1 PH Induction MotorEyad A. FeilatNo ratings yet
- Si CrystalDocument26 pagesSi CrystalEyad A. FeilatNo ratings yet
- Tutorial 4 CT VTDocument3 pagesTutorial 4 CT VTEyad A. FeilatNo ratings yet
- 3-EPE452 - Induction Motors-3Ph PDFDocument87 pages3-EPE452 - Induction Motors-3Ph PDFEyad A. FeilatNo ratings yet
- RBF BP JieeecDocument5 pagesRBF BP JieeecEyad A. FeilatNo ratings yet
- Chapter3 IIDocument9 pagesChapter3 IIEyad A. FeilatNo ratings yet
- Economic Dispatch OptimizationDocument39 pagesEconomic Dispatch OptimizationEyad A. FeilatNo ratings yet
- Shering BridgeDocument7 pagesShering BridgeEyad A. FeilatNo ratings yet
- Miller IndicesDocument22 pagesMiller IndicesEyad A. FeilatNo ratings yet
- Chapter 1Document4 pagesChapter 1Eyad A. FeilatNo ratings yet
- FiltersDocument27 pagesFiltersEyad A. FeilatNo ratings yet
- Micro ActuatorsDocument10 pagesMicro ActuatorsEyad A. FeilatNo ratings yet
- OC ProtectionDocument17 pagesOC ProtectionEyad A. FeilatNo ratings yet
- 3-EPE452 - Induction Motors-3Ph PDFDocument87 pages3-EPE452 - Induction Motors-3Ph PDFEyad A. FeilatNo ratings yet
- RCCHEMDocument10 pagesRCCHEMKartik PandeyNo ratings yet
- Matrix Analysis of Networks: J. R. LucasDocument63 pagesMatrix Analysis of Networks: J. R. LucasNethmini SamarawickramaNo ratings yet
- Automated Home Rainwater Harvesting Earns MoneyDocument4 pagesAutomated Home Rainwater Harvesting Earns MoneysaravananNo ratings yet
- Li HongDocument4 pagesLi HongJiwen SalimNo ratings yet
- Working Principle Iwind Wind TurbinesDocument25 pagesWorking Principle Iwind Wind TurbinesKarbonKaleNo ratings yet
- Installation Manual-Perfect YORKDocument19 pagesInstallation Manual-Perfect YORKjesNo ratings yet
- Kisii University course explores environmental biotech, bioprocessingDocument4 pagesKisii University course explores environmental biotech, bioprocessingRyan ReighnsNo ratings yet
- Ceng3181-Transport Engineering: Haramaya Institute of Technology Department of Civil EngineeringDocument31 pagesCeng3181-Transport Engineering: Haramaya Institute of Technology Department of Civil EngineeringMuaz HararNo ratings yet
- Leadership Theory Application and Skill Development 5th Edition Lussier Test Bank 1Document36 pagesLeadership Theory Application and Skill Development 5th Edition Lussier Test Bank 1douglasbrownyipsmrgkob100% (29)
- Virgin Mobile Insurance BookletDocument51 pagesVirgin Mobile Insurance BookletdanatheteacherNo ratings yet
- Managing Demand Uncertainty in Supply Chain PlanningDocument6 pagesManaging Demand Uncertainty in Supply Chain PlanningSuraj NamdeoNo ratings yet
- Godrej Group Is An Indian Conglomerate Headquartered in MumbaiDocument4 pagesGodrej Group Is An Indian Conglomerate Headquartered in MumbairahulbastyNo ratings yet
- Outrider Character SheetDocument6 pagesOutrider Character SheetColin ZachauNo ratings yet
- 200 300 Series Installation Guide USDocument48 pages200 300 Series Installation Guide USLhexter Mhervin CoNo ratings yet
- A Study On Financial Analysis of Tri Van Drum AirportDocument81 pagesA Study On Financial Analysis of Tri Van Drum AirportN.MUTHUKUMARAN100% (1)
- Mango ratnagiri reportDocument4 pagesMango ratnagiri reportHarsh BhattNo ratings yet
- The Redpoll: Costa Rica and Panama: Land of Birds and CoffeeDocument6 pagesThe Redpoll: Costa Rica and Panama: Land of Birds and CoffeeArctic Audubon SocietyNo ratings yet
- Abb 60 PVS-TLDocument4 pagesAbb 60 PVS-TLNelson Jesus Calva HernandezNo ratings yet
- Divine Mercy Sunday 2014Document2 pagesDivine Mercy Sunday 2014Ssekabira DavidNo ratings yet
- Central Sterile ServiceDocument75 pagesCentral Sterile ServiceSUBHENDU SIKDAR100% (1)
- Micro Gear WheelDocument4 pagesMicro Gear WheelMuhammad Alep JamianNo ratings yet
- ASTM A193-A193M-04cDocument12 pagesASTM A193-A193M-04cNadhiraNo ratings yet
- Comprehensive Land Use Plan in Municipality of TigbauanDocument4 pagesComprehensive Land Use Plan in Municipality of TigbauanmaygracedigolNo ratings yet
- International TradeDocument28 pagesInternational TradeAmit Sharma0% (1)
- 10 1108 - JPBM 07 2022 4070Document19 pages10 1108 - JPBM 07 2022 4070erikNo ratings yet