You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- SSNDocument1,377 pagesSSNBrymo Suarez100% (9)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Yardi Commercial SuiteDocument52 pagesYardi Commercial SuiteSpicyNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Outstanding 12m Bus DrivelineDocument2 pagesOutstanding 12m Bus DrivelineArshad ShaikhNo ratings yet
- Aircraft Gas Turbine Tecnology by IRWINE TREAGER PDFDocument684 pagesAircraft Gas Turbine Tecnology by IRWINE TREAGER PDFJai Deep87% (67)
- 001 Gace Early Childhood TestDocument3 pages001 Gace Early Childhood Testapi-265795386No ratings yet
- Case Study, g6Document62 pagesCase Study, g6julie pearl peliyoNo ratings yet
- 37 Operational Emergency and Abnormal ProceduresDocument40 pages37 Operational Emergency and Abnormal ProceduresLucian Florin ZamfirNo ratings yet
- Required Reading For Piano Technicians PDFDocument28 pagesRequired Reading For Piano Technicians PDFNinaNo ratings yet
- BWT Septron Line 31-61 Rev01!08!05-18 Opm enDocument56 pagesBWT Septron Line 31-61 Rev01!08!05-18 Opm enDavide Grioni100% (1)
- Mechanics Of Materials Solution Manual Beer 4thDocument5 pagesMechanics Of Materials Solution Manual Beer 4thHatake IlhamNo ratings yet
- A. What Is Balanced/objective Review or Criticism?Document11 pagesA. What Is Balanced/objective Review or Criticism?Risha Ann CortesNo ratings yet
- Solution of Introduction To Many-Body Quantum Theory in Condensed Matter Physics (H.Bruus & K. Flensberg)Document54 pagesSolution of Introduction To Many-Body Quantum Theory in Condensed Matter Physics (H.Bruus & K. Flensberg)Calamanciuc Mihai MadalinNo ratings yet
- 2D Pick and Place RobotDocument41 pages2D Pick and Place RobotVikram BogarNo ratings yet
- Composite MaterialsDocument31 pagesComposite MaterialssaadNo ratings yet
- Getting Started Heart Rate Training ReportDocument4 pagesGetting Started Heart Rate Training ReportVikram BogarNo ratings yet
- Composite MaterialsDocument31 pagesComposite MaterialssaadNo ratings yet
- Clarifications of Rule 2 in Teaching Geometric Dimensioning and Tolerancing Asme Quotes RFS FOSDocument14 pagesClarifications of Rule 2 in Teaching Geometric Dimensioning and Tolerancing Asme Quotes RFS FOSAnuKrNo ratings yet
- A Review On Pressure Vessel Design and A PDFDocument3 pagesA Review On Pressure Vessel Design and A PDFVikram BogarNo ratings yet
- Design NH 021716Document16 pagesDesign NH 021716Vikram BogarNo ratings yet
- 09 BrynningsenDocument17 pages09 BrynningsenZahidur Rahman ZahidNo ratings yet
- Effects of Heat Treatment On The Properties of Mild SteelDocument6 pagesEffects of Heat Treatment On The Properties of Mild SteelVikram BogarNo ratings yet
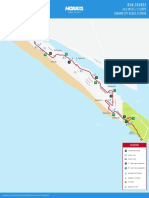
- Im Florida19 Coursemap Run 41219 CC Web 1 PDFDocument2 pagesIm Florida19 Coursemap Run 41219 CC Web 1 PDFVikram BogarNo ratings yet
- CFD Analysis of Heat Exchanger and AftercoolerDocument7 pagesCFD Analysis of Heat Exchanger and AftercoolerVikram BogarNo ratings yet
- Heat Transfer Optimization of Shell-and-Tube PDFDocument51 pagesHeat Transfer Optimization of Shell-and-Tube PDFVikram BogarNo ratings yet
- Numerical Analysis of The Steam Flow Field in Shell and Tube Heat ExchangerDocument14 pagesNumerical Analysis of The Steam Flow Field in Shell and Tube Heat ExchangerVikram BogarNo ratings yet
- Design & Development of A Two-Jaw Parallel Pneumatic Gripper For Robotic ManipulationDocument49 pagesDesign & Development of A Two-Jaw Parallel Pneumatic Gripper For Robotic ManipulationVikram BogarNo ratings yet
- CFD Analysis of Heat Exchanger and AftercoolerDocument7 pagesCFD Analysis of Heat Exchanger and AftercoolerVikram BogarNo ratings yet
- Analysis of Mechanical Error in Quick-Return Shaper MechanismDocument5 pagesAnalysis of Mechanical Error in Quick-Return Shaper MechanismHaresh DesaiNo ratings yet
- Plumbing Arithmetic RefresherDocument80 pagesPlumbing Arithmetic RefresherGigi AguasNo ratings yet
- DMDPrework QuizDocument5 pagesDMDPrework Quizjunpe- yuutoNo ratings yet
- Optimum Work Methods in The Nursery Potting ProcessDocument107 pagesOptimum Work Methods in The Nursery Potting ProcessFöldi Béla100% (1)
- Data Sheet FC SIDocument2 pagesData Sheet FC SIAndrea AtzeniNo ratings yet
- Differentiation: Vehicle Network SolutionsDocument1 pageDifferentiation: Vehicle Network SolutionsДрагиша Небитни ТрифуновићNo ratings yet
- C++ Programmierung (Benjamin Buch, Wikibooks - Org)Document257 pagesC++ Programmierung (Benjamin Buch, Wikibooks - Org)stefano rossiNo ratings yet
- Unitary Small Air-Conditioners and Air-Source Heat Pumps (Includes Mixed-Match Coils) (RATED BELOW 65,000 BTU/H) Certification ProgramDocument65 pagesUnitary Small Air-Conditioners and Air-Source Heat Pumps (Includes Mixed-Match Coils) (RATED BELOW 65,000 BTU/H) Certification ProgramAmer GaladNo ratings yet
- EGMM - Training Partner MOUDocument32 pagesEGMM - Training Partner MOUShaik HussainNo ratings yet
- Pic Attack1Document13 pagesPic Attack1celiaescaNo ratings yet
- List of DEA SoftwareDocument12 pagesList of DEA SoftwareRohit MishraNo ratings yet
- North American Countries ListDocument4 pagesNorth American Countries ListApril WoodsNo ratings yet
- 2 Case StudyDocument8 pages2 Case Studysehrish khawerNo ratings yet
- Module 7 - Assessment of Learning 1 CoursepackDocument7 pagesModule 7 - Assessment of Learning 1 CoursepackZel FerrelNo ratings yet
- Hotels Cost ModelDocument6 pagesHotels Cost ModelThilini SumithrarachchiNo ratings yet
- COP2251 Syllabus - Ellis 0525Document9 pagesCOP2251 Syllabus - Ellis 0525Satish PrajapatiNo ratings yet
- 114 ArDocument254 pages114 ArJothishNo ratings yet
- Manuais - 727312 - manuais-Raios-X AXR - 77000001249Document72 pagesManuais - 727312 - manuais-Raios-X AXR - 77000001249Hosam Ahmed HashimNo ratings yet
- Bosch Committed to Outsourcing to Boost CompetitivenessDocument4 pagesBosch Committed to Outsourcing to Boost CompetitivenessPriya DubeyNo ratings yet
- Technical CommunicationDocument35 pagesTechnical CommunicationPrecious Tinashe NyakabauNo ratings yet