You might also like
- AWTP SCADA and Electrical Drawings IFTDocument55 pagesAWTP SCADA and Electrical Drawings IFTzmNo ratings yet
- PLC Based Motor StartingDocument5 pagesPLC Based Motor StartingSaddam HussainNo ratings yet
- PLC-controlled Stepper Motor Drive For NC PositionDocument10 pagesPLC-controlled Stepper Motor Drive For NC PositiondeoarshiNo ratings yet
- 02 - Ov236-01-Sis HWDocument49 pages02 - Ov236-01-Sis HWSelva ManianNo ratings yet
- Automation Project ReportDocument32 pagesAutomation Project ReportVicky Chaudhary100% (1)
- Introduction to Process Control Feedback and Feedforward ControlDocument30 pagesIntroduction to Process Control Feedback and Feedforward ControlRyle ArbonNo ratings yet
- User Manual Type KITZ 101, 102 Interface Unit: Handling of Electronic EquipmentDocument25 pagesUser Manual Type KITZ 101, 102 Interface Unit: Handling of Electronic EquipmentakmezimNo ratings yet
- Here is the PLC ladder logic diagram to meet the given requirements:1 2 3 4 5 6 7 8| | | | | | | |K1-NO LED Green|K2-NO|LED Red|K1-NC|K2-NCDocument116 pagesHere is the PLC ladder logic diagram to meet the given requirements:1 2 3 4 5 6 7 8| | | | | | | |K1-NO LED Green|K2-NO|LED Red|K1-NC|K2-NCABHISHEK THAKURNo ratings yet
- Control System Configuration PDFDocument2 pagesControl System Configuration PDFjuliunNo ratings yet
- Omron PLC StudyDocument99 pagesOmron PLC StudyferoztechitNo ratings yet
- Pic Based PLCDocument21 pagesPic Based PLCWaqas Maqsud100% (1)
- Cimplicity SecureDeploymentGuide v2 PDFDocument70 pagesCimplicity SecureDeploymentGuide v2 PDFMOHAMMADNo ratings yet
- Low Power Autonomous Controller Fcn-Rtu: Network-Based Control SystemDocument4 pagesLow Power Autonomous Controller Fcn-Rtu: Network-Based Control SystemosmondmanurungNo ratings yet
- PUB060-001-00 - 1110 RCL NetworksDocument8 pagesPUB060-001-00 - 1110 RCL NetworksapisituNo ratings yet
- Lab 1: PLC Hardware FamiliarizationDocument5 pagesLab 1: PLC Hardware FamiliarizationTee CubeNo ratings yet
- SCADA System For Assembly Unit Control SystemDocument8 pagesSCADA System For Assembly Unit Control SystemMohamad TarmiziNo ratings yet
- GS - ProSafe-RS - ProSafe-RS Lite IO List Engineering PackageDocument2 pagesGS - ProSafe-RS - ProSafe-RS Lite IO List Engineering PackageVijayNo ratings yet
- System Redundancy FW V40 enDocument5 pagesSystem Redundancy FW V40 enPassenger MedeamNo ratings yet
- Modbus RTU Versus TCP/IPDocument4 pagesModbus RTU Versus TCP/IPRachiahi TarikNo ratings yet
- Introduction To Yokogawa DCS Centum VP - RealParsDocument18 pagesIntroduction To Yokogawa DCS Centum VP - RealParsKAABECHE SlimaneNo ratings yet
- Ois 40 Series Hardware Iioic43Document79 pagesOis 40 Series Hardware Iioic43buianhtuan1980No ratings yet
- Experion SCADA ILMS BrochureDocument4 pagesExperion SCADA ILMS BrochureFredy López VerezaluceNo ratings yet
- ESD Ovation SystemDocument7 pagesESD Ovation SystemMuhammadIkhsanRestiadiNo ratings yet
- Instrumentation Automation Part25Document2 pagesInstrumentation Automation Part25ArunNo ratings yet
- ControlLogix® 5560M03SE Combination Controller and SERCOS Interface - 1756-In593a-En-PDocument48 pagesControlLogix® 5560M03SE Combination Controller and SERCOS Interface - 1756-In593a-En-PElder MartinsNo ratings yet
- Managing the ERDB with DBAdminDocument22 pagesManaging the ERDB with DBAdminAvandetq AtenaNo ratings yet
- SIS PDS LogicSolver PDFDocument14 pagesSIS PDS LogicSolver PDFsagar_ovhalNo ratings yet
- PLC and Its Application Final-1Document83 pagesPLC and Its Application Final-1Mohsin razaNo ratings yet
- h3ct 5uDocument2 pagesh3ct 5uSampath KumarNo ratings yet
- Data Sheet For Cable Glands and LugsDocument8 pagesData Sheet For Cable Glands and LugsBasabRajNo ratings yet
- E50001-G720-A143-X-4a00 WS Sicam TM 1703 Acp UsDocument6 pagesE50001-G720-A143-X-4a00 WS Sicam TM 1703 Acp UsdannrangerNo ratings yet
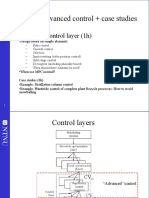
- Part 5: Advanced Control + Case StudiesDocument52 pagesPart 5: Advanced Control + Case StudiestahermohNo ratings yet
- Distributed Control SystemDocument8 pagesDistributed Control SystemParth ShethNo ratings yet
- How To Make Your PLC System For DummiesDocument36 pagesHow To Make Your PLC System For Dummiesdavid carrilloNo ratings yet
- GS32S01B10 21eDocument12 pagesGS32S01B10 21eamidi5555913No ratings yet
- Scada SRSDocument11 pagesScada SRSRana WaqasNo ratings yet
- PLC Interview Questions: 1. What Is The RS LINX Software Used For?Document5 pagesPLC Interview Questions: 1. What Is The RS LINX Software Used For?Pradip ChauhanNo ratings yet
- 0-Gist of Industrial NetworkingDocument12 pages0-Gist of Industrial NetworkingsuritataNo ratings yet
- Training Kit PEK 408 EngDocument38 pagesTraining Kit PEK 408 EngSyed Mohammad NaveedNo ratings yet
- Industrial Communication NetworksDocument20 pagesIndustrial Communication Networksabdel taibNo ratings yet
- Hardware Xp243X V3.0Document103 pagesHardware Xp243X V3.0Mesafint KassieNo ratings yet
- Lecture 1Document39 pagesLecture 1kasunweera100% (1)
- Summer Training Proposal - pdf12Document3 pagesSummer Training Proposal - pdf12Kanchi_chouhan3No ratings yet
- AB Micrologix PLC PDFDocument50 pagesAB Micrologix PLC PDFYasir100% (1)
- Centum VP Engineering Outline Rev 1.1 PDFDocument2 pagesCentum VP Engineering Outline Rev 1.1 PDFrayzo2182No ratings yet
- SUMMER VOCATIONAL TRAINING REPORT (BSEB, SCADA Patna)Document45 pagesSUMMER VOCATIONAL TRAINING REPORT (BSEB, SCADA Patna)Parwez Alam0% (1)
- 1.0 Introduction To Supervisory Control and Data Acquisition (SCADA)Document19 pages1.0 Introduction To Supervisory Control and Data Acquisition (SCADA)AhmedNo ratings yet
- BE1 Numerical Protection Systems: Select The Column Head To See A Description of The IEEE FunctionDocument6 pagesBE1 Numerical Protection Systems: Select The Column Head To See A Description of The IEEE Functionrasheed313No ratings yet
- 1492 sg121 - en PDocument116 pages1492 sg121 - en PAnonymous Wu6FDjbNo ratings yet
- HCMC University PLC PresentationDocument11 pagesHCMC University PLC PresentationClass EngineeringNo ratings yet
- 08 - P12x - Enct - Da6 - GlobalDocument222 pages08 - P12x - Enct - Da6 - Globaltiendung1989No ratings yet
- Sample Cicode To Send Sms From ScadaDocument2 pagesSample Cicode To Send Sms From Scadahifzur_skNo ratings yet
- Manual Cutler HammerDocument114 pagesManual Cutler HammerMarcelo Palacios SantanaNo ratings yet
- Arc NETDocument14 pagesArc NETssignnNo ratings yet
- SSL Certificates For Cisco IOS SSL VPN (2911 Router)Document2 pagesSSL Certificates For Cisco IOS SSL VPN (2911 Router)Cassandra ShafferNo ratings yet
- BCS-041 No. of Printed Pages: 3 Bachelor of Computer Applications (BCA) (Revised)Document3 pagesBCS-041 No. of Printed Pages: 3 Bachelor of Computer Applications (BCA) (Revised)natasha-elisabeth-8530No ratings yet
- User Manual: Explorer 300Document179 pagesUser Manual: Explorer 300Jay SanchaniyaNo ratings yet
- 5G Core Network Product InformationDocument49 pages5G Core Network Product InformationIPLOOK TechnologiesNo ratings yet
- Microsoft: AZ-900 ExamDocument6 pagesMicrosoft: AZ-900 ExampvsrcNo ratings yet
- NU-AP699E9N3 WirelessRouterUserManualDocument151 pagesNU-AP699E9N3 WirelessRouterUserManualHansel OsorioNo ratings yet
- ALU-LR14.02.00.01 UseCaseDocumentDocument76 pagesALU-LR14.02.00.01 UseCaseDocumentprasoontelNo ratings yet
- Sparc t8 3907968Document24 pagesSparc t8 3907968Kesava ReddyNo ratings yet
- ZXA10 C220 (V1.1.2) GPON Optical Access Convergence Equipment Command Manual (Volume IV) PDFDocument359 pagesZXA10 C220 (V1.1.2) GPON Optical Access Convergence Equipment Command Manual (Volume IV) PDFRandy Noary100% (1)
- TCP IP PROTOCOL MCQs - Data Communication and Networking - EXAMRADARDocument1 pageTCP IP PROTOCOL MCQs - Data Communication and Networking - EXAMRADARabhijitmohanty9861No ratings yet
- UNM2000 V2R11 - Product DescriptionDocument84 pagesUNM2000 V2R11 - Product DescriptionDanniel MoreiraNo ratings yet
- Network Security Principles by Saadat MalikDocument1,021 pagesNetwork Security Principles by Saadat Malikkranemetal100% (1)
- Debug 1214Document23 pagesDebug 1214Băran BogdanNo ratings yet
- Sub NettingDocument8 pagesSub Nettingramjee26No ratings yet
- IT Specialist or IT Analyst or Technical Analyst or System AnalyDocument2 pagesIT Specialist or IT Analyst or Technical Analyst or System Analyapi-121456194No ratings yet
- GWN APs GCS V3.0Document85 pagesGWN APs GCS V3.0FranciscoGlezNo ratings yet
- PCI Placement Rules For IBM System IDocument52 pagesPCI Placement Rules For IBM System IchengabNo ratings yet
- Ielts Writing Task 2 Essay (100 Plus Essay)Document513 pagesIelts Writing Task 2 Essay (100 Plus Essay)Zulfiqur RahmanNo ratings yet
- Steen Tanenbaum#Distributed Systems Principles and Paradigms#2017Document597 pagesSteen Tanenbaum#Distributed Systems Principles and Paradigms#2017MARIANA XAVIER DE BRITO DIASNo ratings yet
- Document Revision 1.4 (Fri Nov 04 20:53:13 GMT 2005) : This Document Applies To V2.9Document6 pagesDocument Revision 1.4 (Fri Nov 04 20:53:13 GMT 2005) : This Document Applies To V2.9amx4evaNo ratings yet
- 2013 04 Fujitsu Primergy RoadmapDocument52 pages2013 04 Fujitsu Primergy RoadmapAnonymous YLI2wFNo ratings yet
- USB Power Delivery PHY With Channel Configuration Control: FeaturesDocument2 pagesUSB Power Delivery PHY With Channel Configuration Control: FeaturesChau Nguyen MinhNo ratings yet
- ARIA FXO VOIP GATEWAY (4,8,16 PORTDocument4 pagesARIA FXO VOIP GATEWAY (4,8,16 PORTGirish KumarNo ratings yet
- Cloud-Native Applications vs. Cloud-Based ApplicationsDocument8 pagesCloud-Native Applications vs. Cloud-Based ApplicationsSiddhant BhatnagarNo ratings yet
- Network Security TopologiesDocument29 pagesNetwork Security TopologiesMarti Nica100% (1)
- DS-2CD2741G0-IZS/MD 4.0 MP VF Network Dome Camera: Key FeaturesDocument4 pagesDS-2CD2741G0-IZS/MD 4.0 MP VF Network Dome Camera: Key FeaturesawadalmekawyNo ratings yet
- Distributed Systems ReportDocument36 pagesDistributed Systems ReportClaudette Lui Cabanos- Mercado-Reyes100% (1)
- Intro To IN-CAMELDocument25 pagesIntro To IN-CAMELPrashant GawaiNo ratings yet
- Reveal MTX - Add Software OptionDocument9 pagesReveal MTX - Add Software Optioncogentech appNo ratings yet
- Building configuration optimization for Cisco switchDocument16 pagesBuilding configuration optimization for Cisco switchCesar JimenezNo ratings yet