You might also like
- Collection of String Programs Using Recursion (First Edition)Document18 pagesCollection of String Programs Using Recursion (First Edition)Guide For School82% (11)
- Diamond Water ParadoxDocument2 pagesDiamond Water ParadoxShubham Gupta100% (4)
- Sunderkand & Hanuman ChalisaDocument64 pagesSunderkand & Hanuman ChalisaRohit Garg100% (6)
- Morequestion On DFTDocument4 pagesMorequestion On DFTsenthilkumar100% (1)
- Graph Traversal - DFS & BFSDocument42 pagesGraph Traversal - DFS & BFSKishan100% (1)
- (Undergraduate Texts in Computer Science) David R. Brooks (Auth.) - Problem Solving With Fortran 90 - For Scientists and Engineers-Springer-Verlag New York (1997) PDFDocument711 pages(Undergraduate Texts in Computer Science) David R. Brooks (Auth.) - Problem Solving With Fortran 90 - For Scientists and Engineers-Springer-Verlag New York (1997) PDFMaulanaSyarifAl-KafieSatrya100% (1)
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- Two Pointer Algorithm: Li Yin January 19, 2019Document15 pagesTwo Pointer Algorithm: Li Yin January 19, 2019markNo ratings yet
- Multi-Threaded Cycle Detection in Undirected GraphDocument7 pagesMulti-Threaded Cycle Detection in Undirected GraphShubham GuptaNo ratings yet
- Week 12Document7 pagesWeek 12Mohammad AbidNo ratings yet
- Geeks GraphDocument107 pagesGeeks GraphBHARAT SINGH RAJPUROHITNo ratings yet
- Graphs IIDocument11 pagesGraphs IIMathewsJoshNo ratings yet
- (BFS) Breadth First Search Is A Traversal Technique in Which We Traverse All The Nodes of The Graph in A Breadth-Wise Motion. in BFS, We TraverseDocument10 pages(BFS) Breadth First Search Is A Traversal Technique in Which We Traverse All The Nodes of The Graph in A Breadth-Wise Motion. in BFS, We TraverseMehakNo ratings yet
- Ai LP-II Lab ManualDocument42 pagesAi LP-II Lab ManualAbubaker QureshiNo ratings yet
- Knight moves problem solved with BFSDocument10 pagesKnight moves problem solved with BFSSourav RoyNo ratings yet
- Digital Assignment Theory 18bca0045Document16 pagesDigital Assignment Theory 18bca0045Shamil IqbalNo ratings yet
- Rohan CDocument3 pagesRohan C21bec038No ratings yet
- Chapter Parallel Prefix SumDocument21 pagesChapter Parallel Prefix SumAimee ReynoldsNo ratings yet
- BCA2060 Exercise 6-SLMDocument3 pagesBCA2060 Exercise 6-SLMaryanboxer786No ratings yet
- AI Lab ManualDocument37 pagesAI Lab ManualNeha KardileNo ratings yet
- Search Algorithms in AI6Document17 pagesSearch Algorithms in AI6jhn75070No ratings yet
- Top 10 Algorithms in Interview Questions (Autosaved)Document20 pagesTop 10 Algorithms in Interview Questions (Autosaved)anandNo ratings yet
- G2 Phase2Document13 pagesG2 Phase2mohammed naifNo ratings yet
- Graphs: by Sonia SoansDocument18 pagesGraphs: by Sonia SoanstvsnNo ratings yet
- ACA Unit 8 Hardware and Software For VLIW and EPIC Notes - Unit 8Document35 pagesACA Unit 8 Hardware and Software For VLIW and EPIC Notes - Unit 8Kedar KulkarniNo ratings yet
- Pathfinding and Graph Search AlgorithmsDocument15 pagesPathfinding and Graph Search AlgorithmsNasser SalehNo ratings yet
- AI TheoryDocument4 pagesAI TheorySumedh SumedhNo ratings yet
- Group A) 1 I) C) Ii) B) Iii) B) Iv) A) V) A) Vi) A) Vii) C) Viii) A) Ix) C) X) B) Xi) B) Xii) C) Xiii) B) Xiv) B)Document14 pagesGroup A) 1 I) C) Ii) B) Iii) B) Iv) A) V) A) Vi) A) Vii) C) Viii) A) Ix) C) X) B) Xi) B) Xii) C) Xiii) B) Xiv) B)Barunavo PalNo ratings yet
- oneDocument9 pagesoneawaz mustafaNo ratings yet
- DS Project Report DonDocument15 pagesDS Project Report DonSiddharth BansalNo ratings yet
- Exp 5Document59 pagesExp 5Aman kumarNo ratings yet
- Unit-5: Exploring GraphsDocument77 pagesUnit-5: Exploring GraphsHACKER SPACENo ratings yet
- Group 3 Algorithms AssighmentDocument29 pagesGroup 3 Algorithms AssighmentYawkal AddisNo ratings yet
- AI Lab RecordDocument26 pagesAI Lab RecordJayaram BNo ratings yet
- Bisection Method ExplainedDocument20 pagesBisection Method ExplainedAnonymous J8phVjlxPxNo ratings yet
- JNTUA Artificial Intelligence Lab Manual R20Document33 pagesJNTUA Artificial Intelligence Lab Manual R20lalithasree2020No ratings yet
- Adina Institute of Science & Technology: Department of Computer Science & Engg. M.Tech CSE-II Sem Lab ManualsDocument16 pagesAdina Institute of Science & Technology: Department of Computer Science & Engg. M.Tech CSE-II Sem Lab Manualsrajneesh pachouriNo ratings yet
- Breadth First Search (BFS) Depth First Search (DFS) A-Star Search (A ) Minimax Algorithm Alpha-Beta PruningDocument31 pagesBreadth First Search (BFS) Depth First Search (DFS) A-Star Search (A ) Minimax Algorithm Alpha-Beta Pruninglevecem778No ratings yet
- Project Report On Contour DetectionDocument10 pagesProject Report On Contour DetectionRaghav GuptaNo ratings yet
- Two Pointer Algorithm: Li Yin January 19, 2019Document15 pagesTwo Pointer Algorithm: Li Yin January 19, 2019markNo ratings yet
- Two Pointer Algorithm: Li Yin January 19, 2019Document15 pagesTwo Pointer Algorithm: Li Yin January 19, 2019Hoàng Võ Trần DuyNo ratings yet
- Two Pointer23Document15 pagesTwo Pointer23markNo ratings yet
- Two Pointer Algorithm: Li Yin January 19, 2019Document15 pagesTwo Pointer Algorithm: Li Yin January 19, 2019markNo ratings yet
- Advanced Algorithm Lab: Paper Code:-Pgse-292Document13 pagesAdvanced Algorithm Lab: Paper Code:-Pgse-292Promit MohantaNo ratings yet
- GRAPHSDocument10 pagesGRAPHSsuperhigh06No ratings yet
- Distributed LTL Model-Checking in SPINDocument21 pagesDistributed LTL Model-Checking in SPINSamuel PastvaNo ratings yet
- Ada 7Document2 pagesAda 7Tarushi GandhiNo ratings yet
- Most Useful For FreshersDocument133 pagesMost Useful For FreshersRanjitha RanjuNo ratings yet
- GRAPHSDocument4 pagesGRAPHSNaseer AhmedNo ratings yet
- Technical Aptitude Questions Ebook-172 PagesDocument160 pagesTechnical Aptitude Questions Ebook-172 Pagesmanish0202No ratings yet
- Assignment 2-DSADocument5 pagesAssignment 2-DSAparul chaddhaNo ratings yet
- Bellman-Ford Algorithm Finds Shortest PathDocument5 pagesBellman-Ford Algorithm Finds Shortest PathVinod MogadalaNo ratings yet
- CS231n Convolutional Neural Networks For Visual RecognitionDocument9 pagesCS231n Convolutional Neural Networks For Visual RecognitionDongwoo LeeNo ratings yet
- UntitledDocument15 pagesUntitledBibek SubediNo ratings yet
- Topic Wise Technical Questions Compiled With ExplainationsDocument134 pagesTopic Wise Technical Questions Compiled With ExplainationskavneetrekhiNo ratings yet
- DAA Worksheet-3.1 20BCS7611Document11 pagesDAA Worksheet-3.1 20BCS7611AYUSH TIWARINo ratings yet
- Unit - 5Document34 pagesUnit - 5Sanjay KumarNo ratings yet
- Recursive Functions UpdatedDocument8 pagesRecursive Functions UpdatedANo ratings yet
- HW 3Document16 pagesHW 3Sookyung ParkNo ratings yet
- Technical Aptitude Questions EbookDocument250 pagesTechnical Aptitude Questions EbookAmrit RajNo ratings yet
- Graph Traversal Algorithms: BFS and DFSDocument23 pagesGraph Traversal Algorithms: BFS and DFSsumi kannaNo ratings yet
- Linked ListDocument19 pagesLinked Listمحمد جمالیNo ratings yet
- Check If A Graph Is Strongly Connected - Set 1 (Kosaraju Using DFS) - GeeksforGeeksDocument10 pagesCheck If A Graph Is Strongly Connected - Set 1 (Kosaraju Using DFS) - GeeksforGeeksAtul GargNo ratings yet
- Archie P. Amparo MCS 501: August 11, 2012Document9 pagesArchie P. Amparo MCS 501: August 11, 2012apamparoNo ratings yet
- Recursion PDFDocument28 pagesRecursion PDFShubham GuptaNo ratings yet
- Hanoi Towers - Recursion: Void Int Char Char Char IfDocument24 pagesHanoi Towers - Recursion: Void Int Char Char Char IfShubham GuptaNo ratings yet
- Enrolment Form Phase 2 - PunjabiDocument2 pagesEnrolment Form Phase 2 - PunjabiShubham GuptaNo ratings yet
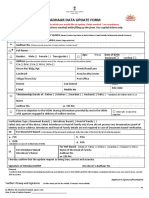
- Aadhaar Data Update Form 03 PDFDocument2 pagesAadhaar Data Update Form 03 PDFpriyanshi64% (28)
- Indane Gas Format For Reactivation of LPG Connection in English Version PDFDocument1 pageIndane Gas Format For Reactivation of LPG Connection in English Version PDFShubham GuptaNo ratings yet
- KYC Version 3Document2 pagesKYC Version 3chanderp_15No ratings yet
- Required Document For PassportDocument6 pagesRequired Document For PassportRichard MullinsNo ratings yet
- Camskra Kyc Change FormDocument2 pagesCamskra Kyc Change FormGaurav Kumar100% (2)
- Third Party Transfer PDFDocument2 pagesThird Party Transfer PDFsahil chadhaNo ratings yet
- Aadhar Enrolment Correction FormDocument2 pagesAadhar Enrolment Correction Formapi-249989744No ratings yet
- Third Party Transfer PDFDocument2 pagesThird Party Transfer PDFsahil chadhaNo ratings yet
- Kyc Form PDFDocument1 pageKyc Form PDFShubham GuptaNo ratings yet
- List of Acceptable DocumentsDocument1 pageList of Acceptable DocumentsyogeshNo ratings yet
- Intermediary Appln FormDocument2 pagesIntermediary Appln FormjinsanghviNo ratings yet
- Camskra Kyc Change FormDocument2 pagesCamskra Kyc Change FormGaurav Kumar100% (2)
- Middle Name Last Name First Name Prefix: Know Your Client (KYC) Application Form (For Individuals Only)Document6 pagesMiddle Name Last Name First Name Prefix: Know Your Client (KYC) Application Form (For Individuals Only)Vijay SwamiNo ratings yet
- Kyc Form PDFDocument1 pageKyc Form PDFShubham GuptaNo ratings yet
- A Brief Discussion of EcoonomicsDocument7 pagesA Brief Discussion of EcoonomicsShubham GuptaNo ratings yet
- Intermediary Appln FormDocument2 pagesIntermediary Appln FormjinsanghviNo ratings yet
- Middle Name Last Name First Name Prefix: Know Your Client (KYC) Application Form (For Individuals Only)Document6 pagesMiddle Name Last Name First Name Prefix: Know Your Client (KYC) Application Form (For Individuals Only)Vijay SwamiNo ratings yet
- Introduction To AndroidDocument7 pagesIntroduction To AndroidShubham GuptaNo ratings yet
- Power and Politics in OrganizationDocument64 pagesPower and Politics in OrganizationShubham GuptaNo ratings yet
- Simple Denoising TechniquesDocument29 pagesSimple Denoising TechniquesShubham GuptaNo ratings yet
- The Concept of ProductivityDocument3 pagesThe Concept of ProductivityShubham GuptaNo ratings yet
- Chapter 6 Recursion PDFDocument16 pagesChapter 6 Recursion PDFBangtan gurlNo ratings yet
- Design and Analysis of Computer AlgorithmDocument60 pagesDesign and Analysis of Computer Algorithmshemsedin shukreNo ratings yet
- DSA Lecture 1: Introduction to Data Structures and AlgorithmsDocument15 pagesDSA Lecture 1: Introduction to Data Structures and AlgorithmsSanchita KadambariNo ratings yet
- 22 Problem Spaces and Search Chapter ObjectivesDocument18 pages22 Problem Spaces and Search Chapter ObjectivesVijaya Prakash RajanalaNo ratings yet
- Backtracking - Set 3 (N Queen Problem) - GeeksforGeeksDocument16 pagesBacktracking - Set 3 (N Queen Problem) - GeeksforGeeksShubham MinhasNo ratings yet
- Recursive Queue Implementation and ConceptsDocument7 pagesRecursive Queue Implementation and ConceptsEmma KhanNo ratings yet
- CS502 Fundamentals of Algorithms Solved MCQSDocument28 pagesCS502 Fundamentals of Algorithms Solved MCQSHusnain SajidNo ratings yet
- B.Tech I & II Semester Syllabus - 2018-19 PDFDocument41 pagesB.Tech I & II Semester Syllabus - 2018-19 PDFDatta YallapuNo ratings yet
- Vol 2 SepDocument701 pagesVol 2 Sepadityapankaj55No ratings yet
- Algorithm Analysis: Algorithm Analysis Recursion Stacks Queues Double-Ended QueuesDocument15 pagesAlgorithm Analysis: Algorithm Analysis Recursion Stacks Queues Double-Ended QueuesHoang TranNo ratings yet
- Be Robotics Detailed Syllabus ImpDocument13 pagesBe Robotics Detailed Syllabus ImpRamya NarayananNo ratings yet
- Algorithms Concurrency OverviewDocument89 pagesAlgorithms Concurrency OverviewDev Rishi ThakurNo ratings yet
- III To VIII Sem Scheme & Syllebus (2008-09) OnwardsDocument139 pagesIII To VIII Sem Scheme & Syllebus (2008-09) OnwardsVadiraj HulyalakarNo ratings yet
- Data - Structures Using C PDFDocument122 pagesData - Structures Using C PDFjegadeeswarNo ratings yet
- ClassPad 330 OS 3.04 User's GuideDocument954 pagesClassPad 330 OS 3.04 User's GuideJhon FigueroaNo ratings yet
- Topic 5 - Abstract Data Structures (IB Computer Science Revision Notes)Document4 pagesTopic 5 - Abstract Data Structures (IB Computer Science Revision Notes)Nethra SubramanianNo ratings yet
- Lec9a SpaceComplexDocument19 pagesLec9a SpaceComplexSIMRAN SEHGALNo ratings yet
- Full NotesDocument114 pagesFull NotesManu Ssvm25% (4)
- 102 Algorithm SpecificationDocument36 pages102 Algorithm Specification36rajnee kantNo ratings yet
- 18 Cps 13Document3 pages18 Cps 13Suhas HanjarNo ratings yet
- CMP201 - Proogramming Expertise in CDocument2 pagesCMP201 - Proogramming Expertise in CJoemon John KurishumootillNo ratings yet
- Recursive functions to solve array, string, math problemsDocument3 pagesRecursive functions to solve array, string, math problemsZhuan WuNo ratings yet
- Bca IV Sem Ada QBDocument19 pagesBca IV Sem Ada QBapi-285363432No ratings yet
- WEEK 1-MaterialDocument12 pagesWEEK 1-MaterialaaquibcaptainamericaNo ratings yet
- Diploma in Computer Engineering: Course Code: 025020401 Data StructuresDocument6 pagesDiploma in Computer Engineering: Course Code: 025020401 Data StructuresPrince ChaudhriNo ratings yet
- BCA AdvancedDocument43 pagesBCA AdvancedManasvi MehtaNo ratings yet
- Harvey B., Wright M. - Simply Scheme. Introducing Computer Science (1999) (Second Edition)Document460 pagesHarvey B., Wright M. - Simply Scheme. Introducing Computer Science (1999) (Second Edition)Xiao TongNo ratings yet
- Data Structures and C Programming (B.SC Cs and B.C.A - 2 Sem)Document118 pagesData Structures and C Programming (B.SC Cs and B.C.A - 2 Sem)sureshmunusamyNo ratings yet