You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Additional Maths Resource Pack2Document46 pagesAdditional Maths Resource Pack2Shaamini100% (6)
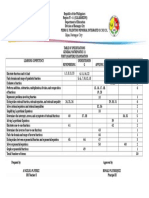
- Table of SpecificationDocument1 pageTable of SpecificationAngelica Manalo PerezNo ratings yet
- Review Module 1 Algebra 1 Part 1Document1 pageReview Module 1 Algebra 1 Part 1Ice DelevingneNo ratings yet
- 2nd Periodical Test Grade 4 MathematicsDocument4 pages2nd Periodical Test Grade 4 MathematicsJacqueline Acera BalingitNo ratings yet
- Book Shahriar Shahriari AlgebraDocument699 pagesBook Shahriar Shahriari Algebramehr1384100% (4)
- 2020 October P4 MSDocument23 pages2020 October P4 MSMomen Yasser100% (1)
- EigenvaluesDocument5 pagesEigenvaluesyashsonone25No ratings yet
- Lec 9.1 IntegralsDocument30 pagesLec 9.1 Integralserlangga1017No ratings yet
- CVSB 371Document8 pagesCVSB 371Long NguyễnNo ratings yet
- 10 21 Unit Plan - Complex NumbersDocument6 pages10 21 Unit Plan - Complex Numbersapi-232996589No ratings yet
- Introduction to connections on principal fibre bundlesDocument12 pagesIntroduction to connections on principal fibre bundlesMike AlexNo ratings yet
- Fourth Periodical Test in Math 10 2019 2020Document5 pagesFourth Periodical Test in Math 10 2019 2020Jaycelyn Magboo BritaniaNo ratings yet
- Math 8 - First Monthly TestDocument3 pagesMath 8 - First Monthly TestAliyah Monique BenitezNo ratings yet
- Assignment 9 (MAN-001)Document4 pagesAssignment 9 (MAN-001)vrm8000No ratings yet
- Matrices and Determinants GuideDocument11 pagesMatrices and Determinants GuideSunnyNo ratings yet
- Mcqs Mth301 SolvedDocument24 pagesMcqs Mth301 Solvedcs619finalproject.com92% (12)
- U5w3 Solving Using QFDocument4 pagesU5w3 Solving Using QFOlisaemeka AniNo ratings yet
- VC.11: 3D Flow Along LiteracyDocument9 pagesVC.11: 3D Flow Along LiteracySri RaghavanNo ratings yet
- Relations and FunctionsDocument2 pagesRelations and Functionssumayyabi pmNo ratings yet
- LCC Course Descriptions for INDU, MNGM, MATH CoursesDocument3 pagesLCC Course Descriptions for INDU, MNGM, MATH CoursesБогдан КулиничNo ratings yet
- Package Dae': R Topics DocumentedDocument129 pagesPackage Dae': R Topics DocumentedBruno KogaNo ratings yet
- 04 Quadratic EquationDocument23 pages04 Quadratic EquationmamunNo ratings yet
- Equations of PlanesDocument35 pagesEquations of PlanesRakibHasanBhashaNo ratings yet
- Iit - Jam Mathematics - 2022 Linear Algebra Matrices Assignment - 5Document2 pagesIit - Jam Mathematics - 2022 Linear Algebra Matrices Assignment - 5pranjal mishraNo ratings yet
- 1006 1133 PDFDocument17 pages1006 1133 PDFNikos MantzakourasNo ratings yet
- 8 PolynomialsDocument16 pages8 PolynomialsMonic RomeroNo ratings yet
- Multi-Step Equations With Answer KeysDocument2 pagesMulti-Step Equations With Answer Keyslucy chenNo ratings yet
- Higher QA 2008 With SolutionsDocument36 pagesHigher QA 2008 With Solutionsrajdeepghai5607No ratings yet
- Sat Practice Test 6 Math No Calculator Answers Assistive TechnologyDocument19 pagesSat Practice Test 6 Math No Calculator Answers Assistive TechnologyJerome PowerMoverNo ratings yet
- Pursuit CurvesDocument18 pagesPursuit CurvesmegustalazorraNo ratings yet