You might also like
- Smart automatic irrigation with soil moisture sensorsDocument15 pagesSmart automatic irrigation with soil moisture sensorsDebashishParidaNo ratings yet
- Pi Advant Tags PDFDocument1 pagePi Advant Tags PDFDebashishParidaNo ratings yet
- My Motivational Learned ThingDocument5 pagesMy Motivational Learned ThingDebashishParidaNo ratings yet
- Proforma Invoice for Boom Barriers and AccessoriesDocument4 pagesProforma Invoice for Boom Barriers and AccessoriesDebashishParidaNo ratings yet
- Omaxe RFID Quotation OptionsDocument3 pagesOmaxe RFID Quotation OptionsDebashishParidaNo ratings yet
- Active Integrated Reader MR3004ADocument1 pageActive Integrated Reader MR3004ADebashishParidaNo ratings yet
- Payment Terms & Conditions: 100% on deliveryDocument4 pagesPayment Terms & Conditions: 100% on deliveryDebashishParidaNo ratings yet
- Boom Barrier - HYDRAULIC PDFDocument11 pagesBoom Barrier - HYDRAULIC PDFDebashishParidaNo ratings yet
- RFID Vehicle Tracking Techno CommercialDocument11 pagesRFID Vehicle Tracking Techno CommercialDebashishParidaNo ratings yet
- Automatic Solar Irrigation SystemDocument16 pagesAutomatic Solar Irrigation SystemDebashishParidaNo ratings yet
- Quotation For RFID TagsDocument3 pagesQuotation For RFID TagsDebashishParidaNo ratings yet
- Barrier EH 4 MTR AMARDEEP SACHAN ECOTRACKSYS NOIDA 30.1.14 PDFDocument2 pagesBarrier EH 4 MTR AMARDEEP SACHAN ECOTRACKSYS NOIDA 30.1.14 PDFDebashishParidaNo ratings yet
- Hydraulic Press MachineDocument1 pageHydraulic Press MachineDebashishParidaNo ratings yet
- Control AC motor speed via smartphoneDocument45 pagesControl AC motor speed via smartphoneDebashishParidaNo ratings yet
- Obstacle Sensed Switching in Industrial ApplicationsDocument19 pagesObstacle Sensed Switching in Industrial ApplicationsDebashishParidaNo ratings yet
- Android Robotic VehicleDocument37 pagesAndroid Robotic VehicleDebashishParidaNo ratings yet
- Active Handheld Reader MR6081CDocument1 pageActive Handheld Reader MR6081CDebashishParidaNo ratings yet
- RFID Based Women Security SystemDocument39 pagesRFID Based Women Security SystemDebashishParidaNo ratings yet
- Automatic Solar Tracking System for Maximum Energy HarvestingDocument20 pagesAutomatic Solar Tracking System for Maximum Energy HarvestingDebashishParidaNo ratings yet
- Automatic street lights that detect vehicle movementDocument15 pagesAutomatic street lights that detect vehicle movementDebashishParidaNo ratings yet
- Material Drilling With Feed Depth SystemDocument37 pagesMaterial Drilling With Feed Depth SystemDebashishParidaNo ratings yet
- Febrication of Remote Control Gantry CraneDocument46 pagesFebrication of Remote Control Gantry CraneDebashishParidaNo ratings yet
- Hydraulic Press MachineDocument1 pageHydraulic Press MachineDebashishParidaNo ratings yet
- Material Drilling With Feed Depth SystemDocument37 pagesMaterial Drilling With Feed Depth SystemDebashishParidaNo ratings yet
- Smart Material Lifting SystemDocument33 pagesSmart Material Lifting SystemDebashishParidaNo ratings yet
- DMD Scrolling Notice Board DisplayDocument18 pagesDMD Scrolling Notice Board DisplayDebashishParidaNo ratings yet
- Automatic Shoe PolishDocument21 pagesAutomatic Shoe PolishDebashishParida100% (2)
- Hydraulic Press MachineDocument1 pageHydraulic Press MachineDebashishParidaNo ratings yet
- DMDDocument34 pagesDMDDebashishParidaNo ratings yet
- Arduino Based Home Automation System Using Bluetooth Through An Android Mobile PDFDocument72 pagesArduino Based Home Automation System Using Bluetooth Through An Android Mobile PDFsaigdv197859% (17)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- KGI K2V 1.5V Installation Information Rev 11-09-05Document13 pagesKGI K2V 1.5V Installation Information Rev 11-09-05Maximiliano Villarreal100% (1)
- Standard U ValuesDocument5 pagesStandard U Valueshello3232No ratings yet
- 0417 Y23 SM 2 PDFDocument16 pages0417 Y23 SM 2 PDFMaria Lea Katlijne Sualog0% (1)
- Mp555e PDFDocument6 pagesMp555e PDFEdgar CanelasNo ratings yet
- Service Desk Coordinator CVDocument2 pagesService Desk Coordinator CVRipunjay MishraNo ratings yet
- R30iB Pendant Customization Guide V8 30 MAROBCG8304141E Rev A PDFDocument219 pagesR30iB Pendant Customization Guide V8 30 MAROBCG8304141E Rev A PDFdenix49No ratings yet
- Impedance in Audio Lundahl TransformerDocument6 pagesImpedance in Audio Lundahl TransformerVũThậpNo ratings yet
- H3C S7500E Series Ethernet Switches Installation Manual (V1.07) - BookDocument200 pagesH3C S7500E Series Ethernet Switches Installation Manual (V1.07) - BookKamaludin AhmadNo ratings yet
- Electrical Mechanical Manufacturing Engineer in San Diego CA Resume Andy SalceDocument3 pagesElectrical Mechanical Manufacturing Engineer in San Diego CA Resume Andy SalceAndySalceNo ratings yet
- Ventomatic - Rotary - Packer - BrochureDocument9 pagesVentomatic - Rotary - Packer - BrochureISA SOIND100% (2)
- Wawb Im20190924eDocument172 pagesWawb Im20190924eHumberto CervantesNo ratings yet
- Av Vibrating Screens PDFDocument2 pagesAv Vibrating Screens PDFArnaldo BenitezNo ratings yet
- DMVPN TutorialDocument10 pagesDMVPN TutorialwahyuabadiNo ratings yet
- SIP5 7SJ82-85 V07.30 Manual C017-7 enDocument1,552 pagesSIP5 7SJ82-85 V07.30 Manual C017-7 enHrvojeNo ratings yet
- Ovation Guitar Price History 1971-2004Document14 pagesOvation Guitar Price History 1971-2004flatfenderNo ratings yet
- tps60401 q1Document29 pagestps60401 q1Rizwan Akram GujjarNo ratings yet
- Typical Drip System LayoutDocument2 pagesTypical Drip System LayoutGunasridharan LakshmananNo ratings yet
- Schematic Diagram For Model 2216: All VersionsDocument1 pageSchematic Diagram For Model 2216: All VersionsZa RacsoNo ratings yet
- 2BT061 - V1 03 - DL (150121)Document22 pages2BT061 - V1 03 - DL (150121)Riza VirsadaNo ratings yet
- SAP DB2 BLU Deployment Prerequisite: Important Points To Be CheckDocument4 pagesSAP DB2 BLU Deployment Prerequisite: Important Points To Be Checkrajesh.9127276No ratings yet
- John Berry ResumeDocument3 pagesJohn Berry Resumeapi-230798470No ratings yet
- 4.17 Batch Controller - Installation ManualDocument34 pages4.17 Batch Controller - Installation Manualel mis75% (4)
- Jsa Installation of Supports and Cable Racks1Document16 pagesJsa Installation of Supports and Cable Racks1loveson709100% (3)
- Manual For Terrestrial Laser Scanner: July 2020Document15 pagesManual For Terrestrial Laser Scanner: July 2020AKi Asmoro SantoNo ratings yet
- Convert An ATX Power Supply Into A Regular DC PowerDocument11 pagesConvert An ATX Power Supply Into A Regular DC PowerhelderruiNo ratings yet
- Trello DojoDocument73 pagesTrello DojoSully StewartNo ratings yet
- Top Drive ModelDocument10 pagesTop Drive ModelJimy Barron100% (1)
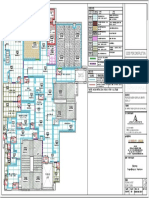
- 7.flooring Layout (Fourth Floor)Document1 page7.flooring Layout (Fourth Floor)Shubham PokhriyalNo ratings yet
- Lab02: Linux Commands Objectives: 1. To Learn The Basic Commands of Linux 2. To Get The Help From The SystemDocument4 pagesLab02: Linux Commands Objectives: 1. To Learn The Basic Commands of Linux 2. To Get The Help From The SystemAsghar AliNo ratings yet
- Shipped But Not TestedDocument3 pagesShipped But Not TestedMiftar MiftariNo ratings yet