You might also like
- Transform Methods: X(S) S JW JW SDocument16 pagesTransform Methods: X(S) S JW JW SAbdullahee YeaheryeaNo ratings yet
- Stability analysis of feedback systemsDocument28 pagesStability analysis of feedback systemsphmferreiraNo ratings yet
- Network Functions PropertiesDocument14 pagesNetwork Functions Propertiessandy101026No ratings yet
- RLC Transfer Function AnalysisDocument38 pagesRLC Transfer Function AnalysisMarasigan Ryan50% (2)
- Solar Cell PDFDocument4 pagesSolar Cell PDF艾哲No ratings yet
- Mathematical Models of SystemsDocument45 pagesMathematical Models of SystemsSaid Ahmed AliNo ratings yet
- Chapter 3 PDFDocument32 pagesChapter 3 PDFEndalew kassahunNo ratings yet
- Ee27 Cuestas Activity 3Document8 pagesEe27 Cuestas Activity 3cj cuestasNo ratings yet
- Introduction To Bond Graph Theory - IDocument34 pagesIntroduction To Bond Graph Theory - IKunwar Faraz AhmedNo ratings yet
- Chapter 1Document12 pagesChapter 1ERMIAS AmanuelNo ratings yet
- What Are Singularity Functions?Document8 pagesWhat Are Singularity Functions?cj cuestasNo ratings yet
- 07 Poles and Zeros of Transfer FunctionDocument33 pages07 Poles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- Transient Response of Basic Circuits Explained in Five StepsDocument93 pagesTransient Response of Basic Circuits Explained in Five StepsChristian KevinNo ratings yet
- RC and RL Circuit Time ConstantsDocument11 pagesRC and RL Circuit Time ConstantsMuhammad Bilal100% (1)
- System StabilityDocument16 pagesSystem Stabilityeugeni madaNo ratings yet
- Frequency Analysis of Variable NetworksDocument9 pagesFrequency Analysis of Variable Networkspyramid3498698No ratings yet
- Troubles at The Origin: Consistent Usage and Properties of The Unilateral Laplace TransformDocument22 pagesTroubles at The Origin: Consistent Usage and Properties of The Unilateral Laplace TransformLarisaNo ratings yet
- Chapter1 16Document11 pagesChapter1 16Ambuz VimalNo ratings yet
- Test-Sheet: 1. Electromagnetic TheoryDocument4 pagesTest-Sheet: 1. Electromagnetic TheoryshaariphNo ratings yet
- Notes On Micro Controller and Digital Signal ProcessingDocument70 pagesNotes On Micro Controller and Digital Signal ProcessingDibyajyoti BiswasNo ratings yet
- ch7Document54 pagesch7toalomari0No ratings yet
- Time Response Time Response: (Textbook Ch.4)Document44 pagesTime Response Time Response: (Textbook Ch.4)Burak AltıparmakNo ratings yet
- Chapter 15 Circuit Analysis in The S-Domaun-1Document36 pagesChapter 15 Circuit Analysis in The S-Domaun-1umerNo ratings yet
- Network 111Document211 pagesNetwork 111ERMIAS AmanuelNo ratings yet
- ECE 209: Circuits and Electronics Laboratory: Math Background: ODE's, LTI Systems, and Laplace TransformsDocument4 pagesECE 209: Circuits and Electronics Laboratory: Math Background: ODE's, LTI Systems, and Laplace TransformsDavid TurnerNo ratings yet
- EECE202 in Class Assignment II EssayDocument4 pagesEECE202 in Class Assignment II EssayAhmad Al-ShormanNo ratings yet
- Inverse Iteration Method For Finding EigenvectorsDocument4 pagesInverse Iteration Method For Finding Eigenvectors王轩No ratings yet
- 26 Control Engineering LAbDocument50 pages26 Control Engineering LAbEashan PendseNo ratings yet
- LaplaceTransform and System StabilityDocument30 pagesLaplaceTransform and System Stabilityhamza abdo mohamoudNo ratings yet
- Etwork Nalysis AND YnthesisDocument20 pagesEtwork Nalysis AND YnthesisBeza W. Mekonnen100% (1)
- BBAU University B.Tech Exam Q&A on Network AnalysisDocument9 pagesBBAU University B.Tech Exam Q&A on Network AnalysisPrakharGupta100% (1)
- The Natural Response of An RL CircuitDocument8 pagesThe Natural Response of An RL CircuitDr. Omar Sh. AlyozbakyNo ratings yet
- Fourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Document4 pagesFourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Fadi Awni EleiwiNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Poles and Zeros of Transfer FunctionDocument34 pagesPoles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- Control System Manual 1 To 5Document23 pagesControl System Manual 1 To 5Eashan PendseNo ratings yet
- Introduction To MatlabDocument25 pagesIntroduction To MatlabLakshay RawalNo ratings yet
- 2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseDocument18 pages2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseprawinpsgNo ratings yet
- Engineering Principles in Physiological Systems AssignmentDocument4 pagesEngineering Principles in Physiological Systems AssignmentEileen FuNo ratings yet
- Repetitive Control Systems: Old and New Ideas: George WEISSDocument16 pagesRepetitive Control Systems: Old and New Ideas: George WEISSSherif M. DabourNo ratings yet
- The Voltage and Current Transfer Ratios of RLC Operator NetworksDocument13 pagesThe Voltage and Current Transfer Ratios of RLC Operator NetworksPriyaNo ratings yet
- Impedance Matching N TransformationDocument51 pagesImpedance Matching N TransformationShreya AdhikariNo ratings yet
- Chapter OneDocument20 pagesChapter OneERMIAS AmanuelNo ratings yet
- Master's Course Entrance Test Questions on Mechatronics and Sensor SystemsDocument2 pagesMaster's Course Entrance Test Questions on Mechatronics and Sensor Systemsdangchi_nguyenNo ratings yet
- App 4 LaplaceDocument6 pagesApp 4 LaplaceRycille AlayanNo ratings yet
- The Linear SystemDocument4 pagesThe Linear SystemAurobindo KumarNo ratings yet
- Open Loop Closed LoopDocument12 pagesOpen Loop Closed LoopKarthik RamNo ratings yet
- EECE 301 Note Set 10 CT ConvolutionDocument11 pagesEECE 301 Note Set 10 CT ConvolutionrodriguesvascoNo ratings yet
- Pole-Zero-Gain Filters: Chapter InsightDocument13 pagesPole-Zero-Gain Filters: Chapter InsightAldon JimenezNo ratings yet
- Quantum Chapter 8 2016Document17 pagesQuantum Chapter 8 2016Aprajita PaliwalNo ratings yet
- Kendall NumtreatDocument12 pagesKendall NumtreatallinacNo ratings yet
- 9650-Article Text-35491-1-10-20120131 PDFDocument8 pages9650-Article Text-35491-1-10-20120131 PDFRamesh Kumar SinghNo ratings yet
- CHAPTER 4 Network Realizability TheoryDocument64 pagesCHAPTER 4 Network Realizability TheoryminteNo ratings yet
- Lecture Notes Week12Document30 pagesLecture Notes Week12tamer.eksioglu2019328No ratings yet
- Transfer Functions: PrerequisitesDocument12 pagesTransfer Functions: PrerequisitesthotalnNo ratings yet
- Model-Free Offline Change-Point Detection Multidimensional Time Series of Arbitrary Nature Via ?-Complexity Simulations and ApplicationsDocument13 pagesModel-Free Offline Change-Point Detection Multidimensional Time Series of Arbitrary Nature Via ?-Complexity Simulations and ApplicationsWong Chiong LiongNo ratings yet
- EEET2197 Tute2Document2 pagesEEET2197 Tute2Collin lcwNo ratings yet
- 04 Aneesh Malhotra ReportDocument13 pages04 Aneesh Malhotra ReportAneesh MalhotraNo ratings yet
- Lecture notes on network analysis and transmission linesDocument105 pagesLecture notes on network analysis and transmission linesjale charitha reddyNo ratings yet
- Optimal Cooperative Data Transmission Over SC-FDMA Channel Estimation On LTE-A Based NetworksDocument3 pagesOptimal Cooperative Data Transmission Over SC-FDMA Channel Estimation On LTE-A Based Networksnandakishore.nallaNo ratings yet
- Resource Allocation With Frequency Reuse Using MatlabDocument31 pagesResource Allocation With Frequency Reuse Using Matlabnandakishore.nallaNo ratings yet
- Joint Routing and Resource Allocation For Millimeter Wave Picocellular BackhaulDocument13 pagesJoint Routing and Resource Allocation For Millimeter Wave Picocellular Backhaulnandakishore.nallaNo ratings yet
- QoS-based Power Allocation for Cellular Networks using MATLABDocument36 pagesQoS-based Power Allocation for Cellular Networks using MATLABnandakishore.nallaNo ratings yet
- MOSEK Licensing Guide: Release 9.3.20Document31 pagesMOSEK Licensing Guide: Release 9.3.20nandakishore.nallaNo ratings yet
- Binder MulticarreirDocument5 pagesBinder MulticarreirjobinvcmNo ratings yet
- ABCD RULE Maliganat and MelonomaDocument3 pagesABCD RULE Maliganat and Melonomanandakishore.nallaNo ratings yet
- Chapter-2 Laplace Transform: Definition of The Laplace TransformationDocument15 pagesChapter-2 Laplace Transform: Definition of The Laplace Transformationnandakishore.nallaNo ratings yet
- MATLAB Communications Major Project ListDocument1 pageMATLAB Communications Major Project Listnandakishore.nallaNo ratings yet
- Wolaita Sodo University: Ii Year Ii Semester Signals and Systems AnalysisDocument2 pagesWolaita Sodo University: Ii Year Ii Semester Signals and Systems Analysisnandakishore.nallaNo ratings yet
- G. Sayanna EthiopiaDocument3 pagesG. Sayanna Ethiopianandakishore.nallaNo ratings yet
- Factors Affecting Consumer Behaviour in the Telecom IndustryDocument6 pagesFactors Affecting Consumer Behaviour in the Telecom Industrynandakishore.nallaNo ratings yet
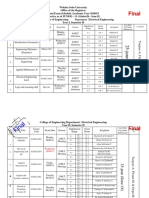
- Electrical Final Scedule FinalDocument6 pagesElectrical Final Scedule Finalnandakishore.nallaNo ratings yet
- MM M Wave ApplnsDocument6 pagesMM M Wave Applnsnandakishore.nallaNo ratings yet
- Wolaita Sodo University: College of EngineeringDocument3 pagesWolaita Sodo University: College of Engineeringnandakishore.nallaNo ratings yet
- Importatent QueationsDocument1 pageImportatent Queationsnandakishore.nallaNo ratings yet
- Wolaita Sodo UniversityDocument3 pagesWolaita Sodo Universitynandakishore.nallaNo ratings yet
- Transmission LinesDocument24 pagesTransmission Linesnandakishore.nallaNo ratings yet
- Marie Skłodowska-Curie ITN Research Fellowship (36mthsDocument6 pagesMarie Skłodowska-Curie ITN Research Fellowship (36mthsnandakishore.nallaNo ratings yet
- SFT TSTNGDocument7 pagesSFT TSTNGnandakishore.nallaNo ratings yet
- Shiva AyyaduraiDocument60 pagesShiva AyyaduraiJoy Velu100% (2)
- FYBSc Computer Science Question BankDocument49 pagesFYBSc Computer Science Question BankvbjhgjNo ratings yet
- Wireless Communications SystemsDocument12 pagesWireless Communications Systemsnandakishore.nallaNo ratings yet
- Frequent Buses in Important Routes: From: Mahatma Gandhi Bus Station (Mgbs or IBS)Document9 pagesFrequent Buses in Important Routes: From: Mahatma Gandhi Bus Station (Mgbs or IBS)nandakishore.nallaNo ratings yet
- Multiple Xing and T CarriersDocument10 pagesMultiple Xing and T Carriersnandakishore.nallaNo ratings yet
- BCD To AsciiDocument1 pageBCD To Asciinandakishore.nallaNo ratings yet
- Digital TransmissionDocument10 pagesDigital Transmissionnandakishore.nallaNo ratings yet
- IC Lab Manual by Suresh BabuDocument83 pagesIC Lab Manual by Suresh Babunandakishore.nalla92% (13)
- Chapter Overview: Point Operations!: Relating Gray Values To Brightness!Document36 pagesChapter Overview: Point Operations!: Relating Gray Values To Brightness!nandakishore.nallaNo ratings yet
- ArtigoPublicado ABR 14360Document14 pagesArtigoPublicado ABR 14360Sultonmurod ZokhidovNo ratings yet
- CH - 3Document3 pagesCH - 3Phantom GamingNo ratings yet
- Dell EMC VPLEX For All-FlashDocument4 pagesDell EMC VPLEX For All-Flashghazal AshouriNo ratings yet
- The Etteilla Tarot: Majors & Minors MeaningsDocument36 pagesThe Etteilla Tarot: Majors & Minors MeaningsRowan G100% (1)
- Agricultural Sciences P1 Nov 2015 Memo EngDocument9 pagesAgricultural Sciences P1 Nov 2015 Memo EngAbubakr IsmailNo ratings yet
- Brooks Cole Empowerment Series Becoming An Effective Policy Advocate 7Th Edition Jansson Solutions Manual Full Chapter PDFDocument36 pagesBrooks Cole Empowerment Series Becoming An Effective Policy Advocate 7Th Edition Jansson Solutions Manual Full Chapter PDFlois.guzman538100% (12)
- Osora Nzeribe ResumeDocument5 pagesOsora Nzeribe ResumeHARSHANo ratings yet
- About Version ControlDocument6 pagesAbout Version ControlMaria Kristina Cassandra HeukshorstNo ratings yet
- Intec Waste PresiDocument8 pagesIntec Waste Presiapi-369931794No ratings yet
- Lesson 5 CMADocument10 pagesLesson 5 CMAAssma SabriNo ratings yet
- Scholars of Hadith Methodology in Dealing With The Two Sahihs: The Criticized Ahadith As A Model. Ammar Ahmad Al-HaririDocument37 pagesScholars of Hadith Methodology in Dealing With The Two Sahihs: The Criticized Ahadith As A Model. Ammar Ahmad Al-HaririSalah KhanNo ratings yet
- EG-45-105 Material Information Sheet (Textura) V2Document4 pagesEG-45-105 Material Information Sheet (Textura) V2GPRNo ratings yet
- 67c Series Bulletin 08 04 PDFDocument12 pages67c Series Bulletin 08 04 PDFnight wolfNo ratings yet
- Grade 10 - Mock Test - English - Feb - 2023Document12 pagesGrade 10 - Mock Test - English - Feb - 2023rohanNo ratings yet
- Drypro832 PreInstallGude 0921YH220B 070627 FixDocument23 pagesDrypro832 PreInstallGude 0921YH220B 070627 FixRicardoNo ratings yet
- Prof. Michael Murray - Some Differential Geometry ExercisesDocument4 pagesProf. Michael Murray - Some Differential Geometry ExercisesAnonymous 9rJe2lOskxNo ratings yet
- SQL 1: Basic Statements: Yufei TaoDocument24 pagesSQL 1: Basic Statements: Yufei TaoHui Ka HoNo ratings yet
- Mba Project GuidelinesDocument8 pagesMba Project GuidelinesKrishnamohan VaddadiNo ratings yet
- Credit Risk Management Practice in Private Banks Case Study Bank of AbyssiniaDocument85 pagesCredit Risk Management Practice in Private Banks Case Study Bank of AbyssiniaamogneNo ratings yet
- All MeterialsDocument236 pagesAll MeterialsTamzid AhmedNo ratings yet
- EQ - Module - Cantilever MethodDocument17 pagesEQ - Module - Cantilever MethodAndrea MalateNo ratings yet
- (App Note) How To Design A Programmable Gain Instrumentation AmplifierDocument7 pages(App Note) How To Design A Programmable Gain Instrumentation AmplifierIoan TudosaNo ratings yet
- Trimble Oem Gnss Bro Usl 0422Document3 pagesTrimble Oem Gnss Bro Usl 0422rafaelNo ratings yet
- RestrukturisasiDocument17 pagesRestrukturisasimuhammad hayel wallaNo ratings yet
- CV Abdalla Ali Hashish-Nursing Specialist.Document3 pagesCV Abdalla Ali Hashish-Nursing Specialist.Abdalla Ali HashishNo ratings yet
- Eudragit ReviewDocument16 pagesEudragit ReviewlichenresearchNo ratings yet
- BSC6900 UMTS V900R011C00SPC700 Parameter ReferenceDocument1,010 pagesBSC6900 UMTS V900R011C00SPC700 Parameter Referenceronnie_smgNo ratings yet
- Grade 10Document39 pagesGrade 10amareNo ratings yet
- Choose the Best WordDocument7 pagesChoose the Best WordJohnny JohnnieeNo ratings yet
- Mole Concept - DPP 09 (Of Lec 13) - Yakeen 2.0 2024 (Legend)Document3 pagesMole Concept - DPP 09 (Of Lec 13) - Yakeen 2.0 2024 (Legend)Romeshchandra Class X-CNo ratings yet