You might also like
- Service Manual H14TX H16TPX PDFDocument272 pagesService Manual H14TX H16TPX PDFPedro CarvalhoNo ratings yet
- Manual Operator Telescopic PDFDocument232 pagesManual Operator Telescopic PDFChakroune100% (2)
- Enviando MOTOR MAZDA Hyster-897477-02-01-Srm0496 PDFDocument38 pagesEnviando MOTOR MAZDA Hyster-897477-02-01-Srm0496 PDFPedro Carvalho100% (2)
- Vce150a 748432 040Document4 pagesVce150a 748432 040Pedro CarvalhoNo ratings yet
- ZAPI DualAC-2 ManualDocument89 pagesZAPI DualAC-2 ManualRicardo Gamez OrtegaNo ratings yet
- 4d88e YanmmarDocument280 pages4d88e YanmmarMiguel Gil97% (35)
- BDX53Document5 pagesBDX53Melek KeleşNo ratings yet
- 1 - Proton Compiler ManualDocument456 pages1 - Proton Compiler ManualSkp FANo ratings yet
- 17295214-Bobcat T40140 T40170 Telescopic Handler Service Repair Manual Download S N 363212001 Above 363312001 Above PDFDocument712 pages17295214-Bobcat T40140 T40170 Telescopic Handler Service Repair Manual Download S N 363212001 Above 363312001 Above PDFPedro Carvalho91% (11)
- 17295214-Bobcat T40140 T40170 Telescopic Handler Service Repair Manual Download S N 363212001 Above 363312001 Above PDFDocument712 pages17295214-Bobcat T40140 T40170 Telescopic Handler Service Repair Manual Download S N 363212001 Above 363312001 Above PDFPedro Carvalho91% (11)
- Csla 2 ElDocument5 pagesCsla 2 ElPedro CarvalhoNo ratings yet
- CAT SIS Manual Usuarios y Contraseñas PDFDocument15 pagesCAT SIS Manual Usuarios y Contraseñas PDFYonny Colque100% (1)
- 02 Ed P 2011aDocument13 pages02 Ed P 2011aPedro CarvalhoNo ratings yet
- UNS141Document142 pagesUNS141Pedro Carvalho0% (1)
- 2.0 Amp Output Current IGBT Gate Drive Optocoupler: HCPL-3120Document15 pages2.0 Amp Output Current IGBT Gate Drive Optocoupler: HCPL-3120euromoszeusNo ratings yet
- 2000 W Universal Motor Control Based On The STM8S103F2Document23 pages2000 W Universal Motor Control Based On The STM8S103F2Devendra DwivdiNo ratings yet
- F30UP20STDocument5 pagesF30UP20STPedro CarvalhoNo ratings yet
- CD00242370 PDFDocument5 pagesCD00242370 PDFPedro CarvalhoNo ratings yet
- 05 Ed P 2011aDocument85 pages05 Ed P 2011aPedro CarvalhoNo ratings yet
- R6016-6018-6020#6030-6031-6031 Manual TallerDocument232 pagesR6016-6018-6020#6030-6031-6031 Manual TallerPedro Carvalho0% (1)
- 1346351847.bobcat S185 Skid Steer PDFDocument194 pages1346351847.bobcat S185 Skid Steer PDFPedro Carvalho50% (4)
- A6 - Three Phase Inverter PDFDocument40 pagesA6 - Three Phase Inverter PDFPedro Carvalho100% (2)
- ADocument19 pagesAPedro CarvalhoNo ratings yet
- 0600SRM0705 (03 2006) Uk en PDFDocument132 pages0600SRM0705 (03 2006) Uk en PDFPedro CarvalhoNo ratings yet
- Determining Mosfet Driver Need For Motor Drive ApplicationDocument18 pagesDetermining Mosfet Driver Need For Motor Drive ApplicationfayazkadirNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- AP Physics 2: Algebra-Based 2015 Free-Response QuestionsDocument11 pagesAP Physics 2: Algebra-Based 2015 Free-Response QuestionsAdam El TohamyNo ratings yet
- PLC01 Psu1 AI/O1: SiemensDocument1 pagePLC01 Psu1 AI/O1: SiemensSyachrial YusufNo ratings yet
- General Physics 2Document35 pagesGeneral Physics 2St. DymphaMaralit, Joyce Anne L.No ratings yet
- Ground Fault Sensor: CR7310 SeriesDocument2 pagesGround Fault Sensor: CR7310 SeriesbhaskarinvuNo ratings yet
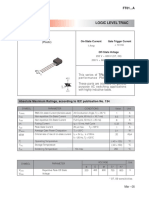
- LOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSDocument4 pagesLOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSAnatoly WolkoffNo ratings yet
- Relay Coordination Techniques Using SoftwareDocument4 pagesRelay Coordination Techniques Using Softwarerobertovm2002No ratings yet
- Curso WD3 - Rev02.1 PDFDocument60 pagesCurso WD3 - Rev02.1 PDFSunny ElNo ratings yet
- Akash Singh's Document on Liquid LensesDocument27 pagesAkash Singh's Document on Liquid LensesAbhay SinghNo ratings yet
- BBJ-Series explosion-proof audible and visual alarm (IIC、tD)Document1 pageBBJ-Series explosion-proof audible and visual alarm (IIC、tD)Sigit RiyadiNo ratings yet
- Be Winter 2018Document2 pagesBe Winter 2018vikram patilNo ratings yet
- Laser Emitting DiodeDocument25 pagesLaser Emitting Diodelaurilla22_No ratings yet
- Isometer Bender PDFDocument40 pagesIsometer Bender PDFpttung0% (1)
- Manual Book Mark 7 ArterionDocument157 pagesManual Book Mark 7 ArterionSyamsul Putra100% (1)
- Final Earthing V3Document22 pagesFinal Earthing V3RewanEsamNo ratings yet
- Muhammad Waqas 09-EE-119 UET, Taxila Grid and The Sub StationDocument7 pagesMuhammad Waqas 09-EE-119 UET, Taxila Grid and The Sub StationSajjad SajjadNo ratings yet
- Avr-X1600h Avr-S750h Eng SM v02Document163 pagesAvr-X1600h Avr-S750h Eng SM v02Raimundo de LimaNo ratings yet
- Effect of Surge Current Testing On Reliability of Solid Tantalum CapacitorsDocument18 pagesEffect of Surge Current Testing On Reliability of Solid Tantalum CapacitorsRoberto FernandezNo ratings yet
- DIN Fuses 7.2kV - 36kVDocument124 pagesDIN Fuses 7.2kV - 36kVlarryNo ratings yet
- 02b Rfamp PDFDocument18 pages02b Rfamp PDFHassan Ul HaqNo ratings yet
- MOS Field Effect Transistor 2SK3919: SMD Type IC Mosfet SMD TypeDocument1 pageMOS Field Effect Transistor 2SK3919: SMD Type IC Mosfet SMD Typeserrano.flia.coNo ratings yet
- DPR - IPDS Jammu - 30.4.2015Document82 pagesDPR - IPDS Jammu - 30.4.2015Manoj ManhasNo ratings yet
- XGN15 Ring Main Unit User's ManualDocument21 pagesXGN15 Ring Main Unit User's ManualFrancisco VeraNo ratings yet
- Project InverterDocument67 pagesProject InverterKeshavGargNo ratings yet
- Ee101 Super Diode 1 PDFDocument2 pagesEe101 Super Diode 1 PDFArief NurhakikiNo ratings yet
- Cylindrical Proximity Magnetic Sensors for Detection of Ferrous TargetsDocument2 pagesCylindrical Proximity Magnetic Sensors for Detection of Ferrous TargetsTenuka pereraNo ratings yet
- Basic Electronics 2Document66 pagesBasic Electronics 2Sandhya DeviNo ratings yet
- MPM80 Series Data Sheet: 2 A Non-Isolated Buck Converter ModuleDocument20 pagesMPM80 Series Data Sheet: 2 A Non-Isolated Buck Converter ModuleytnateNo ratings yet
- Eletric TractionDocument21 pagesEletric TractionGowri Sri Gowri75% (4)
- Implementation of SPWM Technique For 3 - VSI Using STM32F4 Discovery Board Interfaced With MATLABDocument5 pagesImplementation of SPWM Technique For 3 - VSI Using STM32F4 Discovery Board Interfaced With MATLABkiratNo ratings yet
- Dse E800Document2 pagesDse E800mohammad hazbehzadNo ratings yet