You might also like
- ZYTP58-Fxxx Series: 58mm Micro-Thermal Printer Control ModuleDocument20 pagesZYTP58-Fxxx Series: 58mm Micro-Thermal Printer Control ModuleFranciscanos CFPFNo ratings yet
- Electrovert Electra Operation ManualDocument170 pagesElectrovert Electra Operation ManualAngerhouse50% (2)
- A12 ManualDocument65 pagesA12 ManualOscar Vazquez EspinosaNo ratings yet
- RichAuto CNC System GuideDocument66 pagesRichAuto CNC System Guidelaoznas885No ratings yet
- DELTA - IA PLC - DVP PLC S H2 H3 Series - MDM - EN - 20131112 PDFDocument344 pagesDELTA - IA PLC - DVP PLC S H2 H3 Series - MDM - EN - 20131112 PDFEnrique Francisco WekwertNo ratings yet
- DELTA - IA-PLC - DVP-PLC-S-H2-H3-series - MDM - EN - 20131112 (3) (001-100) PDFDocument100 pagesDELTA - IA-PLC - DVP-PLC-S-H2-H3-series - MDM - EN - 20131112 (3) (001-100) PDFIntermissionNo ratings yet
- DSP A11 Manual PDFDocument68 pagesDSP A11 Manual PDFwaqar AzeemNo ratings yet
- Beijing RuiZhitianhong A18-Four Axis ManualDocument73 pagesBeijing RuiZhitianhong A18-Four Axis ManualkicsispermaNo ratings yet
- A11 3axis ManualDocument55 pagesA11 3axis ManualSanda Cucovici-DiaconNo ratings yet
- Beijing Ruizhitianhong S&T Co.,LtdDocument71 pagesBeijing Ruizhitianhong S&T Co.,LtdkicsispermaNo ratings yet
- Delta Ia-Plc Ispsoft Um en 20150318Document657 pagesDelta Ia-Plc Ispsoft Um en 20150318Juliano SoaresNo ratings yet
- Content: Beijing Ruizhitianhong Technology Co - LTDDocument54 pagesContent: Beijing Ruizhitianhong Technology Co - LTDAlex NavarroNo ratings yet
- MyPower VG IP Config ManualDocument181 pagesMyPower VG IP Config ManualAishaGrewalNo ratings yet
- A11 ManualDocument53 pagesA11 ManualZaid Hadi100% (1)
- Appliance Image Installation & Getting Started GuideDocument58 pagesAppliance Image Installation & Getting Started GuideChristopher ScannellNo ratings yet
- Em78p153s PDFDocument54 pagesEm78p153s PDFMarian MarinNo ratings yet
- Beijing Ruizhitianhong S&T Co.,Ltd Engraving Machine Motion Control System A11:Three-axis Mechanical Carving User's ManualDocument68 pagesBeijing Ruizhitianhong S&T Co.,Ltd Engraving Machine Motion Control System A11:Three-axis Mechanical Carving User's ManualJacpro Automation SacNo ratings yet
- EMS Configuration Guide: GPON OLT Products User ManualDocument126 pagesEMS Configuration Guide: GPON OLT Products User ManualРуслан ШматкоNo ratings yet
- DX-3001-V Series Industrial 3G/WAN VPN Router User ManualDocument63 pagesDX-3001-V Series Industrial 3G/WAN VPN Router User ManualManuel EspnzaNo ratings yet
- Quick Guide To South Network RTK Configuration s86Document42 pagesQuick Guide To South Network RTK Configuration s86Gilbert K. Maritim100% (1)
- How to Use DSP Handel_2Document56 pagesHow to Use DSP Handel_2aliyazdaniNo ratings yet
- Process MasterDocument80 pagesProcess MasterBryanTANo ratings yet
- 241CE II System 200 Software User Guide - RevDDocument86 pages241CE II System 200 Software User Guide - RevDChandra Martua NapitupuluNo ratings yet
- Ranarex User Manual 3028635Document68 pagesRanarex User Manual 3028635ahcenen100% (1)
- HWI - Protocol and Signaling AnalysisDocument197 pagesHWI - Protocol and Signaling Analysisstere_c23No ratings yet
- Plc Dvp50mcDocument1,081 pagesPlc Dvp50mcnarimanNo ratings yet
- Gen4 Product Manual V3.0Document118 pagesGen4 Product Manual V3.0velmusNo ratings yet
- DSPC 04 Manual PDFDocument56 pagesDSPC 04 Manual PDFعبدالرحمن شرباتيNo ratings yet
- AN5116-02 Technical ManualDocument72 pagesAN5116-02 Technical ManualValdinei Quaresma0% (1)
- MPC 5676Document92 pagesMPC 5676zdravkorrNo ratings yet
- Maintenance Experience Issue219 (Data Products) PDFDocument31 pagesMaintenance Experience Issue219 (Data Products) PDFkumarank12No ratings yet
- F8914 ZigBee Terminal User ManualDocument37 pagesF8914 ZigBee Terminal User ManualChelsea MedellinNo ratings yet
- HUAWEI MA5105 & MA5103 DSLAMs Equipment Installation Work Instruction. (NIP-WI-BI0008)Document26 pagesHUAWEI MA5105 & MA5103 DSLAMs Equipment Installation Work Instruction. (NIP-WI-BI0008)Wi PhNo ratings yet
- PCI 8134+PCI 8134A - 50 11173 1000 - 300 - enDocument175 pagesPCI 8134+PCI 8134A - 50 11173 1000 - 300 - enNg Yau JiaNo ratings yet
- E-Fim OTNM2000 Element Management System Operation GuideDocument614 pagesE-Fim OTNM2000 Element Management System Operation GuidePrabin Mali86% (7)
- f1102 Gprs Intelligent Modem User ManualDocument31 pagesf1102 Gprs Intelligent Modem User ManualianfourfaithNo ratings yet
- User Manual METEK - Chandler Chanscope and Dew Point TesterDocument66 pagesUser Manual METEK - Chandler Chanscope and Dew Point Testerpamela brianaNo ratings yet
- CC2530 Version F8X23 Series ROUTER USER MANUALDocument47 pagesCC2530 Version F8X23 Series ROUTER USER MANUALChelsea MedellinNo ratings yet
- Delta Ia-Plc All Om en 20151113Document173 pagesDelta Ia-Plc All Om en 20151113microsoda8No ratings yet
- CANalyzer User Guide V3 - 1Document213 pagesCANalyzer User Guide V3 - 1vlsishekar0% (1)
- XGK&XGB Instruction (080624)Document497 pagesXGK&XGB Instruction (080624)Pedro Henrique Pimentel de SousaNo ratings yet
- CH13-2270 - Dewpoint Rev N PDFDocument66 pagesCH13-2270 - Dewpoint Rev N PDFFer A. Molina CéspedesNo ratings yet
- Industrial Automation Headquarters Locations WorldwideDocument65 pagesIndustrial Automation Headquarters Locations WorldwidericardosoarescostaNo ratings yet
- F5933 Series ROUTER USER MANUALDocument38 pagesF5933 Series ROUTER USER MANUALChelsea MedellinNo ratings yet
- Pxa255 q7 EngDocument106 pagesPxa255 q7 Engqweeerty123100% (1)
- f1102 Gprs Intelligent Modem User ManualDocument30 pagesf1102 Gprs Intelligent Modem User ManualCocofourfaithNo ratings yet
- Guangzhou HC Information Technology Co., LTD.: Product Data SheetDocument15 pagesGuangzhou HC Information Technology Co., LTD.: Product Data SheetCosmin ChiriţăNo ratings yet
- PDF WEIHONG Ncstudio Users Manual - CNC Manual PDFDocument118 pagesPDF WEIHONG Ncstudio Users Manual - CNC Manual PDFSơn Nguyễn Thanh100% (1)
- Q Databook L-08029E-ADocument506 pagesQ Databook L-08029E-AJohn Forbes NashNo ratings yet
- T336CxNxNDx V17Document73 pagesT336CxNxNDx V17West CharleNo ratings yet
- RichAuto Motion Control System ManualDocument89 pagesRichAuto Motion Control System ManualSebastian Almaraz UnzuetaNo ratings yet
- Taiwan CatalogDocument27 pagesTaiwan Catalogmarshalpc67% (12)
- 909 User Manual Rev H PDFDocument354 pages909 User Manual Rev H PDFRemiel Zapata GNo ratings yet
- Delta Ia-Plc Dvp15mc Om en 20200113Document972 pagesDelta Ia-Plc Dvp15mc Om en 20200113iulianNo ratings yet
- User Guide for Tool Turrets ApplicationDocument131 pagesUser Guide for Tool Turrets ApplicationEdwin RodríguezNo ratings yet
- A8112 Series ManualDocument92 pagesA8112 Series ManualAli AbbasNo ratings yet
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Documents - MX - Caterpillar c9 Schematic PDFDocument4 pagesDocuments - MX - Caterpillar c9 Schematic PDFLuis Emilio Santana DiazNo ratings yet
- C9 Training TextDocument104 pagesC9 Training TextTariqMaqsood100% (3)
- C-9 Estudiante LabDocument29 pagesC-9 Estudiante LabJesus CuevasNo ratings yet
- Energy Management Energy Meter Type EM2-DIN: Product Description Ordering Key Em2-Dinav53D XXDocument6 pagesEnergy Management Energy Meter Type EM2-DIN: Product Description Ordering Key Em2-Dinav53D XXTariqMaqsoodNo ratings yet
- Eding CNC Manual v4.03Document218 pagesEding CNC Manual v4.03TariqMaqsoodNo ratings yet
- C9 Lab Activity - InstructorDocument29 pagesC9 Lab Activity - InstructorTariqMaqsoodNo ratings yet
- Drawing Reference Symbols NEN 5152Document22 pagesDrawing Reference Symbols NEN 5152TariqMaqsoodNo ratings yet
- Caterpillar Battery ChargerDocument1 pageCaterpillar Battery ChargerTariqMaqsoodNo ratings yet
- Caterpillar Engine Codes DescriptionDocument3 pagesCaterpillar Engine Codes DescriptionTariqMaqsoodNo ratings yet
- EUI User Guide (Engine Simulator)Document134 pagesEUI User Guide (Engine Simulator)TariqMaqsoodNo ratings yet
- Diagram Caterpillar Batery ChargerDocument1 pageDiagram Caterpillar Batery ChargerTariqMaqsoodNo ratings yet
- Wire Cutting Control Programming SystemDocument59 pagesWire Cutting Control Programming SystemFabián Barzola NavarreteNo ratings yet
- 37356A UMT1 Packages ManualDocument53 pages37356A UMT1 Packages ManualTariqMaqsoodNo ratings yet
- Altronic Ignition Coil 501 061 Data Sheet V 2Document1 pageAltronic Ignition Coil 501 061 Data Sheet V 2TariqMaqsoodNo ratings yet
- Wire Edm Machining Simulations Based On Step-Nc Program: Sasa Zivanovic, Radovan PuzovicDocument8 pagesWire Edm Machining Simulations Based On Step-Nc Program: Sasa Zivanovic, Radovan PuzovicAdmir Atko JusićNo ratings yet
- Sitara Chemicals Control CHP Unit 2Document90 pagesSitara Chemicals Control CHP Unit 2TariqMaqsoodNo ratings yet
- User Manual: Stepping SystemsDocument101 pagesUser Manual: Stepping SystemsOai NguyễnNo ratings yet
- Multi Function Relay Mains & Generator Protection & ControlDocument4 pagesMulti Function Relay Mains & Generator Protection & ControlTariqMaqsoodNo ratings yet
- 05-07-02-03-01 - Dezentrale Peripherie 01 PDFDocument17 pages05-07-02-03-01 - Dezentrale Peripherie 01 PDFTariqMaqsoodNo ratings yet
- WIP 1 (Over Current) PDFDocument72 pagesWIP 1 (Over Current) PDFTariqMaqsoodNo ratings yet
- GCP31 26131 PDFDocument188 pagesGCP31 26131 PDFTariqMaqsoodNo ratings yet
- MFR 3 Multi Function Relay: ManualDocument165 pagesMFR 3 Multi Function Relay: ManualTariqMaqsoodNo ratings yet
- Proact Digital Plus Electric Actuator User ManualDocument122 pagesProact Digital Plus Electric Actuator User ManualTariqMaqsoodNo ratings yet
- Isolation Switching AmplifierDocument4 pagesIsolation Switching AmplifierTariqMaqsoodNo ratings yet
- Specification, Controls and Accessories: AS540 Automatic Voltage Regulator (AVR)Document20 pagesSpecification, Controls and Accessories: AS540 Automatic Voltage Regulator (AVR)iipmnpti iipmNo ratings yet
- Technical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedDocument9 pagesTechnical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedTariqMaqsoodNo ratings yet
- Instruction Manual: MX322 Automatic Voltage Regulator (AVR)Document20 pagesInstruction Manual: MX322 Automatic Voltage Regulator (AVR)TariqMaqsoodNo ratings yet
- Technical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedDocument9 pagesTechnical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedTariqMaqsoodNo ratings yet
- 05-07-02-02-02 - Station Control Panel PDFDocument64 pages05-07-02-02-02 - Station Control Panel PDFTariqMaqsoodNo ratings yet
- DSG DIG Installation Service and MaintenanceDocument142 pagesDSG DIG Installation Service and MaintenanceAlbert ArtellsNo ratings yet
- Access and Use InternetDocument85 pagesAccess and Use InternetSanta BestNo ratings yet
- Huawei OceanStor 5300 5500 5600 and 5800 V3 Storage Systems Technical White PaperDocument44 pagesHuawei OceanStor 5300 5500 5600 and 5800 V3 Storage Systems Technical White PaperStefan LeinNo ratings yet
- Evaluating IP Surveillance Camera Vulnerabilities - 2 PDFDocument9 pagesEvaluating IP Surveillance Camera Vulnerabilities - 2 PDFPreethi VennamNo ratings yet
- SAP ABAP GGB0 User ExitDocument5 pagesSAP ABAP GGB0 User ExitChintan SedhiaNo ratings yet
- Team Mate+AM+IT+Overview+12Document41 pagesTeam Mate+AM+IT+Overview+12epajueloNo ratings yet
- Lesson 7 Project Management ExercisesDocument4 pagesLesson 7 Project Management ExercisesJvnRodz P GmlmNo ratings yet
- Guia Ransom WareDocument44 pagesGuia Ransom WareJesus Fernandez AlvarezNo ratings yet
- CheckPoint End SecurityDocument2 pagesCheckPoint End SecurityDragan LončarskiNo ratings yet
- CN Test SolutionsDocument5 pagesCN Test Solutionsnidhi uppalNo ratings yet
- Tutorial (IntegraXor A Web-Based SCADA Software)Document58 pagesTutorial (IntegraXor A Web-Based SCADA Software)Ali KayacanNo ratings yet
- Online Threats and RiskDocument3 pagesOnline Threats and RiskJullianaNo ratings yet
- TV BROADCASTING NEWS ANCHOR ARRESTED HACKERS ELECTION OUTCOMEDocument3 pagesTV BROADCASTING NEWS ANCHOR ARRESTED HACKERS ELECTION OUTCOMECheane GaniaNo ratings yet
- Hostingultraso Com Dedicated-Server ArgentinaDocument7 pagesHostingultraso Com Dedicated-Server Argentinamansi bishtNo ratings yet
- Dict Dodoma PDFDocument2 pagesDict Dodoma PDFSirbus GentsNo ratings yet
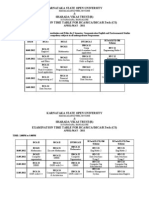
- Downloads Time Table April 2012 BCA MCA IMCA (1) FinalDocument10 pagesDownloads Time Table April 2012 BCA MCA IMCA (1) Finallovedixit1No ratings yet
- Ibeta Completes Spoofing and Liveness Testing ProjectDocument2 pagesIbeta Completes Spoofing and Liveness Testing ProjectPR.comNo ratings yet
- Notice BTP 19 12 2020Document34 pagesNotice BTP 19 12 2020Priyansh KumarNo ratings yet
- PROFIdrive Presentation PDFDocument31 pagesPROFIdrive Presentation PDFnew2trackNo ratings yet
- Speech To Text ConversionDocument6 pagesSpeech To Text ConversionBhavik ChhajedNo ratings yet
- AnnotatedDocument5 pagesAnnotatedapi-509651062No ratings yet
- CS610 Q1 SOLUTION - Address Resolution Techniques ComparisonDocument2 pagesCS610 Q1 SOLUTION - Address Resolution Techniques ComparisonmankhokharNo ratings yet
- Tata Group CRM Analysis and Case StudiesDocument21 pagesTata Group CRM Analysis and Case StudiesakhilNo ratings yet
- Mpls Vs IPSec VPNsDocument2 pagesMpls Vs IPSec VPNsWewe SlmNo ratings yet
- ASTU online internal marks entryDocument2 pagesASTU online internal marks entryChandra UpadhyayaNo ratings yet
- Technical OverviewDocument64 pagesTechnical OverviewDaniel GhellerNo ratings yet
- Technical Recruiter Talent Acquisition in Salt Lake City UT Resume Joe PeckDocument2 pagesTechnical Recruiter Talent Acquisition in Salt Lake City UT Resume Joe PeckJoePeckNo ratings yet
- Killer User Guide 4.0Document15 pagesKiller User Guide 4.0hlkhnklht6s555No ratings yet
- Face Detection System - File Exchange - MATLAB CentralDocument8 pagesFace Detection System - File Exchange - MATLAB CentralPollen Ahmed100% (1)
- TOAD User's Guide 7 - 2 PDFDocument505 pagesTOAD User's Guide 7 - 2 PDFKamlesh SoniNo ratings yet
- Annotated BibliographyDocument8 pagesAnnotated Bibliographyapi-495941898No ratings yet