You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Conscious Uncoupling e BookDocument15 pagesConscious Uncoupling e BookIvaylo Yordanov100% (11)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elliott Turiel - The Development of Social Knowledge. Morality & Convention-Cambridge University Press (1983) PDFDocument126 pagesElliott Turiel - The Development of Social Knowledge. Morality & Convention-Cambridge University Press (1983) PDFKaren ForeroNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- An Exploratory Study of Goal Setting in Theory and Practice: A Motivational Technique That Works?Document17 pagesAn Exploratory Study of Goal Setting in Theory and Practice: A Motivational Technique That Works?Yvette HouseNo ratings yet
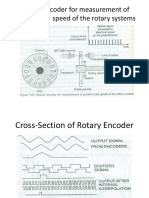
- Unit 4Document31 pagesUnit 4Senthil KumarNo ratings yet
- ROS based Indoor Navigation Simulation Using SLAMDocument8 pagesROS based Indoor Navigation Simulation Using SLAMSenthil KumarNo ratings yet
- Digital LogicDocument11 pagesDigital LogicSenthil KumarNo ratings yet
- Introduction To Field Programmable Gate Arrays (Fpgas)Document8 pagesIntroduction To Field Programmable Gate Arrays (Fpgas)Senthil KumarNo ratings yet
- ROS based Indoor Navigation Simulation Using SLAMDocument8 pagesROS based Indoor Navigation Simulation Using SLAMSenthil KumarNo ratings yet
- A Comparison of Fuzzy Logic and PID Controller For A Single-Axis Solar Tracking SystemDocument14 pagesA Comparison of Fuzzy Logic and PID Controller For A Single-Axis Solar Tracking SystemSenthil KumarNo ratings yet
- Ignition SystemsDocument10 pagesIgnition Systemselvergonzalez1No ratings yet
- CNN in Deep LearningDocument1 pageCNN in Deep LearningSenthil KumarNo ratings yet
- Moazzam 2019Document6 pagesMoazzam 2019Senthil KumarNo ratings yet
- Dubey 2016 Ijca 911675 PDFDocument4 pagesDubey 2016 Ijca 911675 PDFSenthil KumarNo ratings yet
- Dubey 2016 Ijca 911675 PDFDocument4 pagesDubey 2016 Ijca 911675 PDFSenthil KumarNo ratings yet
- Dubey 2016 Ijca 911675 PDFDocument4 pagesDubey 2016 Ijca 911675 PDFSenthil KumarNo ratings yet
- Cdi 4 Stroke EngineDocument21 pagesCdi 4 Stroke EngineJose Ricardo WilsonNo ratings yet
- Dubey 2016 Ijca 911675 PDFDocument4 pagesDubey 2016 Ijca 911675 PDFSenthil KumarNo ratings yet
- 7yx3d Yy7bjDocument16 pages7yx3d Yy7bjSenthil KumarNo ratings yet
- nrrb7 p0gkv PDFDocument17 pagesnrrb7 p0gkv PDFSenthil KumarNo ratings yet
- RetrofittingDocument8 pagesRetrofittingSenthil KumarNo ratings yet
- Reinforcement Learning Robotics ResearchDocument7 pagesReinforcement Learning Robotics ResearchSenthil KumarNo ratings yet
- Dubey 2016 Ijca 911675 PDFDocument4 pagesDubey 2016 Ijca 911675 PDFSenthil KumarNo ratings yet
- Feedback DevicesDocument14 pagesFeedback DevicesSenthil KumarNo ratings yet
- MF6505 CNC SyllabusDocument2 pagesMF6505 CNC SyllabusSenthil KumarNo ratings yet
- BacklashDocument15 pagesBacklashSenthil KumarNo ratings yet
- MF6505 CNC SyllabusDocument2 pagesMF6505 CNC SyllabusSenthil KumarNo ratings yet
- Machine Vision BasicsDocument29 pagesMachine Vision BasicsSenthil KumarNo ratings yet
- 17 Power Screw Drives and Their EfficiencyDocument15 pages17 Power Screw Drives and Their EfficiencyPRASAD326100% (2)
- Construction Details of CNCDocument80 pagesConstruction Details of CNCSenthil KumarNo ratings yet
- Lecture 25 Rapid Prototyping PDFDocument7 pagesLecture 25 Rapid Prototyping PDFbvnareshNo ratings yet
- FDM Design Tech PDFDocument7 pagesFDM Design Tech PDFSenthil KumarNo ratings yet
- FDM Rapid Prototyping PDFDocument5 pagesFDM Rapid Prototyping PDFSenthil KumarNo ratings yet
- RT R T: TechnologyDocument3 pagesRT R T: TechnologySenthil KumarNo ratings yet
- Milgrams (1963 ObedienceDocument5 pagesMilgrams (1963 ObedienceAmandaNo ratings yet
- Psicología Educativa: Social Cognition in Adolescence: Social Rejection and Theory of MindDocument7 pagesPsicología Educativa: Social Cognition in Adolescence: Social Rejection and Theory of MindAnyella CastilloNo ratings yet
- Freud's Psychoanalytic Theory and Structure of PersonalityDocument22 pagesFreud's Psychoanalytic Theory and Structure of PersonalityKhimberly Xylem OrtizNo ratings yet
- Personality: (Chapter 2)Document33 pagesPersonality: (Chapter 2)SamKris Guerrero MalasagaNo ratings yet
- Tourism Theory - MaslowDocument16 pagesTourism Theory - Maslowhafis82100% (1)
- The 10 Essential Limits: Family Guide To Borderline Personality DisorderDocument2 pagesThe 10 Essential Limits: Family Guide To Borderline Personality DisorderjajarinomudoNo ratings yet
- RRL Social MediaDocument2 pagesRRL Social MediaMelissa LouiseNo ratings yet
- Reflection-Understanding The SelfDocument1 pageReflection-Understanding The SelfRicky Anthony Hingco EscobiaNo ratings yet
- Ascension SymptomsDocument6 pagesAscension Symptomsdbest12No ratings yet
- Week 2 DilemmasDocument3 pagesWeek 2 Dilemmasaila mae abulenciaNo ratings yet
- A Op G Venturer ScoutsDocument24 pagesA Op G Venturer ScoutsfritzNo ratings yet
- Developing The Whole PersonDocument16 pagesDeveloping The Whole PersonFrancaise Agnes MascariñaNo ratings yet
- Lesson 1 Axiology of ValuesDocument19 pagesLesson 1 Axiology of ValuesJennifer OriolaNo ratings yet
- Art Therapy: Florina Farhana Sarah HusnaDocument13 pagesArt Therapy: Florina Farhana Sarah HusnaSarah Love100% (1)
- Self-Determination Theory and The Facilitation of Intrinsic Motivation, Social Development, and Well-BeingDocument14 pagesSelf-Determination Theory and The Facilitation of Intrinsic Motivation, Social Development, and Well-Beingjayson cajateNo ratings yet
- Victor R. Baltazar, S.J. Student ProfessorDocument7 pagesVictor R. Baltazar, S.J. Student ProfessorDagul JauganNo ratings yet
- Turn Conflicts Into Opportunities With These Resolution SkillsDocument13 pagesTurn Conflicts Into Opportunities With These Resolution SkillsNag28rajNo ratings yet
- Moiuy 7Document4 pagesMoiuy 7pupegufNo ratings yet
- Primitive Defenses in Couples TherapyDocument82 pagesPrimitive Defenses in Couples TherapyRoxana L. ZaineaNo ratings yet
- Session 13 LD11 Authentic LeadershipDocument22 pagesSession 13 LD11 Authentic LeadershiprajatvarnaNo ratings yet
- Perception and Emotional Judgments of Music in Dementia of The Alzheimer Type A Short Case StudyDocument12 pagesPerception and Emotional Judgments of Music in Dementia of The Alzheimer Type A Short Case Studyapi-538965270No ratings yet
- Attachment TheoryDocument4 pagesAttachment Theoryshaqinuraisya100% (1)
- Mental Status ExaminationDocument25 pagesMental Status ExaminationVishal Makvana AhirNo ratings yet
- Nick Arandes ACIM NotesDocument216 pagesNick Arandes ACIM NotesPaul van Britsom100% (1)
- Stoptober's Motivation Theory Case StudyDocument25 pagesStoptober's Motivation Theory Case StudyPhá LấuNo ratings yet
- The ActDocument12 pagesThe ActJeff Ordinal50% (2)
- Anderson'S Article On Nationalism: 1. The Three Paradoxes of NationalismDocument2 pagesAnderson'S Article On Nationalism: 1. The Three Paradoxes of NationalismMelly De Guzman Esmaquil0% (2)