You might also like
- Holidays-List-dps (1)Document2 pagesHolidays-List-dps (1)orionNo ratings yet
- Sexualharassment (1)Document1 pageSexualharassment (1)orionNo ratings yet
- The Great Iron: PillarDocument14 pagesThe Great Iron: PillarorionNo ratings yet
- Module 2 Mechanics of Machining Lesson 8 Forces and Merchant's Circle DiagramDocument15 pagesModule 2 Mechanics of Machining Lesson 8 Forces and Merchant's Circle DiagramSUBHASH ANURAGNo ratings yet
- Science-Class-X-Chapter-1-Chemical-Reactions-And-EquationsDocument6 pagesScience-Class-X-Chapter-1-Chemical-Reactions-And-EquationsorionNo ratings yet
- MEE1003 Engineering-Thermodynamics TH 1 AC37 PDFDocument2 pagesMEE1003 Engineering-Thermodynamics TH 1 AC37 PDForionNo ratings yet
- Somnath MahalayDocument409 pagesSomnath MahalayorionNo ratings yet
- WorksheetDocument6 pagesWorksheetorionNo ratings yet
- Practical File: Program 1: Program To Enter Two Numbers and Print The Arithmetic Operations Like +,-,, /, // and %Document36 pagesPractical File: Program 1: Program To Enter Two Numbers and Print The Arithmetic Operations Like +,-,, /, // and %Bahu AnnaduraiNo ratings yet
- Strength of Materials Course Assignment AnalysisDocument1 pageStrength of Materials Course Assignment AnalysisRAMAN TYAGINo ratings yet
- MEE2004 Mechanics-Of-Machines ETH 1.1 AC40Document3 pagesMEE2004 Mechanics-Of-Machines ETH 1.1 AC40orionNo ratings yet
- 16bme0011 VL2017181001484 Ast03 PDFDocument5 pages16bme0011 VL2017181001484 Ast03 PDForionNo ratings yet
- Attendance rule changes at VITDocument21 pagesAttendance rule changes at VITorionNo ratings yet
- Sts2001 Soft-Skills Ss 1 Ac39Document1 pageSts2001 Soft-Skills Ss 1 Ac39orionNo ratings yet
- World's First Water Treatment Techniques Using Apple and Tomato Peels - ScienceDailyDocument4 pagesWorld's First Water Treatment Techniques Using Apple and Tomato Peels - ScienceDailyorionNo ratings yet
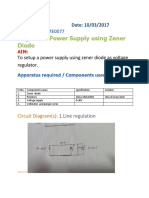
- Regulated Power Supply using Zener Diode ExperimentDocument5 pagesRegulated Power Supply using Zener Diode ExperimentorionNo ratings yet
- Chandramauli Dwivedi Mind MapsDocument2 pagesChandramauli Dwivedi Mind MapsorionNo ratings yet
- Https WWW - Irctc.co - in Eticketing PrintTicketDocument2 pagesHttps WWW - Irctc.co - in Eticketing PrintTicketorionNo ratings yet
- Hind PharmaDocument5 pagesHind PharmaorionNo ratings yet
- Chandramauli Dwivedi16BME0077 Mind Map For Remembering ContentDocument1 pageChandramauli Dwivedi16BME0077 Mind Map For Remembering ContentorionNo ratings yet
- Apology LetterDocument1 pageApology LetterorionNo ratings yet
- Assignmen 6. Chandramauli Dwivedi 16bme0077Document1 pageAssignmen 6. Chandramauli Dwivedi 16bme0077orionNo ratings yet
- Digital Assignment 1Document1 pageDigital Assignment 1orionNo ratings yet
- Short Note On Given GraphDocument2 pagesShort Note On Given GraphorionNo ratings yet
- Lec - 6 TrussesDocument13 pagesLec - 6 TrussesorionNo ratings yet
- 1 - Mesh Current AnalysisDocument2 pages1 - Mesh Current AnalysisorionNo ratings yet
- Short Note On Given GraphDocument2 pagesShort Note On Given GraphorionNo ratings yet
- Assignment 1Document19 pagesAssignment 1orionNo ratings yet
- Farmer device inventor Mr. Chandramauli Dwivedi named man of the yearDocument1 pageFarmer device inventor Mr. Chandramauli Dwivedi named man of the yearorionNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Week 1Document47 pagesWeek 1MohanNo ratings yet
- Space Robotics & Autonomous Systems:: Widening The Horizon of Space ExplorationDocument24 pagesSpace Robotics & Autonomous Systems:: Widening The Horizon of Space ExplorationManjunath ANo ratings yet
- Part-A: Sia GroupDocument8 pagesPart-A: Sia GroupRahul RoyNo ratings yet
- Robotics EssayDocument1 pageRobotics EssayChipNo ratings yet
- Aleksandar Lazinica and Hiroyuki Kawai (Eds.) - Robot Manipulators, New Achievements (2010, InTech) - Libgen - LiDocument728 pagesAleksandar Lazinica and Hiroyuki Kawai (Eds.) - Robot Manipulators, New Achievements (2010, InTech) - Libgen - Likurts010No ratings yet
- Angular GripperDocument12 pagesAngular GripperAman RajNo ratings yet
- Rise of RobotsDocument9 pagesRise of RobotsPep SS100% (1)
- Flower Knitting Machine: R.Anandhi, D.Kowsalya and N.Jerusha ChintuDocument3 pagesFlower Knitting Machine: R.Anandhi, D.Kowsalya and N.Jerusha ChintuaruljeromeNo ratings yet
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDocument48 pagesOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniNo ratings yet
- App 1934015024Document358 pagesApp 1934015024robotics154No ratings yet
- Automated Welding Solutions PDFDocument12 pagesAutomated Welding Solutions PDFMarlon ManaoisNo ratings yet
- Floor Disinfecting Robot ProjectDocument20 pagesFloor Disinfecting Robot ProjectKristian ApuraNo ratings yet
- Recent Advances in Mobile Robotics - TopalovDocument464 pagesRecent Advances in Mobile Robotics - TopalovBruno MacedoNo ratings yet
- Unit 6 Ict Artificial IntelligenceDocument4 pagesUnit 6 Ict Artificial IntelligenceJenalyn LunaNo ratings yet
- A Seminar ON Artificial IntilligenceDocument16 pagesA Seminar ON Artificial IntilligencePrachi VyasNo ratings yet
- What is a Robot? Essential CharacteristicsDocument12 pagesWhat is a Robot? Essential CharacteristicsNykie MalagayoNo ratings yet
- Banking Industry Adopts Augmented RealityDocument50 pagesBanking Industry Adopts Augmented RealityAkash KatiyarNo ratings yet
- Ammar Qaraghuli CVDocument3 pagesAmmar Qaraghuli CVDelia HarringtonNo ratings yet
- Perez, Candy Claire B. BSN 1-C Homework No. 1Document1 pagePerez, Candy Claire B. BSN 1-C Homework No. 1candy perezNo ratings yet
- Robotics SyllabusDocument52 pagesRobotics SyllabusManoj Kumar100% (1)
- News Industry 5.0: Humanoid Vs Journalist's Culture: Riris Loisa Ahmad Junaidi, Sinta ParamitaDocument7 pagesNews Industry 5.0: Humanoid Vs Journalist's Culture: Riris Loisa Ahmad Junaidi, Sinta ParamitaSagar RathodNo ratings yet
- Fabrication of Humanoid and Implementation of Gaits PDFDocument57 pagesFabrication of Humanoid and Implementation of Gaits PDFSriman Rao ShirivoluNo ratings yet
- Robots (Research Paper)Document22 pagesRobots (Research Paper)Sophia Michelle JadlocNo ratings yet
- Emedia Robotic Educ 231219Document44 pagesEmedia Robotic Educ 231219Iep_Jem_6994No ratings yet
- Building Machines That Emulate Humans: Lesson Plan and More Resources Are Available At: Aka - Ms/hackingstemDocument34 pagesBuilding Machines That Emulate Humans: Lesson Plan and More Resources Are Available At: Aka - Ms/hackingstemAndré FozzyNo ratings yet
- 01 HistoryDocument12 pages01 HistoryJefferson MagallanesNo ratings yet
- B.E.mech R21 Padeepz AppDocument45 pagesB.E.mech R21 Padeepz AppVadivel .RNo ratings yet
- Robotics Seminar on ApplicationsDocument31 pagesRobotics Seminar on ApplicationsPriyaranjan BeheraNo ratings yet
- Alexander Amini, PHD: EducationDocument5 pagesAlexander Amini, PHD: EducationFirdaus BambooNo ratings yet
- An Overview of Systems and Techniques For Autonomous Robotic Ultrasound AcquisitionsDocument16 pagesAn Overview of Systems and Techniques For Autonomous Robotic Ultrasound AcquisitionsAshish Presanna ChandranNo ratings yet