2, United States Patent
Beckman et al.
(54) MANEUVERING A PACKAGE FOLLOWING
IN-FLIGHT RELEASE FROM AN
UNMANNED AERIAL VEHICLE (UAV)
(71) Applicant: Amazon Technologies, Ine, Seattle,
WA (US)
(72) Inventors: Brian C. Beckman, Newcastle, WA,
(US); Menashe Haskin, Kfar Vitkin
(IL); Michae! Rotaik, Geva Binyamin
((L}: Yan Vale, Moda (L)
(73) Assignee: Amazon Technologies, Ine, Seattle,
Wa (Us)
(4) Notice: Subjoct to any disclaimer, the term of this
patent is extended or adjusted under 35
USC. 1846) by 0 days.
1) Appl. Now 147752,671
(22) Filed: Jun, 26, 2015
(1) Insc.
B6iC 1720 (2005.01)
Bosc 122 (2005.01)
BOD 7100 (2006.01),
BoD V12 (2006.01)
Bose 3902 (2006.01),
BoD 110 (2006.01)
Us. CL.
crc B6AD W12 (2013.01); BOSC 39024
(2013.01); B64D 1/10 (2013.01); B64C
2201/128 (2013.01)
8)
ration Search,
[GAD 1/00; GSD 1/02; BGAD 108;
64D 1/10; BSED 1/12; BEAD
9100; Bo4D 19/00; 1864C 391024; B6EC
220/027; BIC 2201/12; BOIC 201/128
‘See application file for complete search history.
'US0095670811
US 9,567,081 B1
Feb. 14, 2017
(10) Patent No.:
(4s) Date of Patent:
66) References Cited
US. PATENT DOCUMENTS.
SU68267 A+ 21965 Feri BoaD 102
24138 A
6942184 BL* 912005 Morris BoA 102
238 R
S3aLa1 BL* 4016 Takayama Bea Liz
aoudinstons AL 32004 Warten Bib 19.00
20910230555 AL* 102005 Strong BEAD 7343
2412
200710018089 AL* 1/2007 amuse pean ita
243.27
(Continved)
Richard G Davis
Lee & Hayes, PLLC
Primary Examiner
(74) Attornes, Agent, or Firm
on A
A package delivery system can be implemented to forcefully
propel a package from an unmanned acial vehicle (UAV),
‘while the UAV isin motion. The UAV ean apply foree onto
the package that ater its descent trajectory from a parabolic
pall o a Vertical descent path. The package delivery system
fn apply the free onto the package in a numberof different
\ways. For example, pneumatic actuators, electromagnets
spring coils, and parachutes ean generate the foree that
establishes the vertical descent path of the package. Further,
the package delivery system can also monitor the package
during its vertical desoeat. The package ean be equipped
‘with one or more contol surfices. Instructions ean be
‘eansmitted from the UAV via an RE module that eause the
‘one or more controls surfaces to alter the vertical descent
path of the package 10 avoid obstructions or to regain &
Stable orientation,
RACT
20 Claims, 14 Drawing Sheets
US 9,567,081 BI
Page 2
66) References Cited
USS. PATENT DOCUMENTS.
20070029439 AL* 22007 Merems Boab 19902
2407 R
20091002619 AL* 1/2009. Strong Bec 1024
249152
* cited by examiner
US 9,567,081 BL
Sheet 1 of 14
Feb. 14, 2017
U.S. Patent
AN3OS3G
‘ONIUNG AYOLOAT EL
govyOvd Isnray
NY HOLINOW OL AVA,
BANLILTW Lv 39vOWd
AO7d30 OL AVA
wr
BOWIOWE
HLM LHOMENI Ayn
U.S. Patent Feb. 14, 2017 Sheet 2 of 14 US 9,567,081 B1
2
\
Yeo \at0
206
204 /
FIG. 2A
FIG. 2B
U.S. Patent Feb. 14, 2017
Sheet 3 of 14
US 9,567,081 BI
- 308
cc Dn
KN
: a) ~
e \
. aig ~ 308
\ 304 ee
U.S. Patent
~ 310
Feb. 14, 2017
304
Sheet 4 of 14
FIG.
US 9,567,081 BL
302
306
312
308
3c
U.S. Patent Feb. 14, 2017 Sheet 5 of 14 US 9,567,081 B1
402
Z
404 zk
_ 1
14
S ;
“412
FIG. 4A
402
P
/ \ 410
a ~ 406
404 416
ay, 4
= i744
8 +
412
FIG. 4B
U.S. Patent Feb. 14, 2017 Sheet 6 of 14 US 9,567,081 B1
402
422
424 ‘420
“404
424 422
420
FIG. 4D
U.S. Patent Feb. 14, 2017 Sheet 7 of 14 US 9,567,081 B1
506
504 502
508(2)
512
516 \ S810
FIG. 5A 514
508(2)
504
H
508(1) , io
'
o !
508 516 |
512
FIG. 5B
U.S. Patent Feb. 14, 2017 Sheet 8 of 14 US 9,567,081 B1
/ 822
520, 518(1)
526 FX .
5182) a ee
506 | 526 Sp 2
| [524
508(1) ft
508(2) 510
FIG. 5C » 502
5182) 518(1)
508(1)
504
~~ §08(2)
U.S. Patent Feb. 14, 2017 Sheet 9 of 14 US 9,567,081 B1
504 502
z 500(2)
508(1) { 4
508(2)
SS
S
528(1)
see) FIG. SE
508(2)
504
5282). |g | 526(1)
534
, > 592
p 5 saa)
520
5283) FIG. 5F
U.S. Patent Feb. 14, 2017 Sheet 10 of 14 US 9,567,081 B1
802
“508
GY
FIG. 5G
8
U.S. Patent Feb. 14, 2017 Sheet 11 of 14 US 9,567,081 B1
606
604 602
612
FIG. 6A
610
608
FIG. 6B
U.S. Patent Feb. 14, 2017 Sheet 12 of 14 US 9,567,081 B1
PACKAGE LAUNCH CONTROLLER
702
vromoe PROCESSOR
ane |S ie
Sew |e .
rerew Cone RSA WED Tl
“SENSOR DATA PROCESSING
MopuLe
28
FLighT DATA MODULE
730
(Gee ccmmd) Tanectucenae
( Package —_—a ‘SURFACE
oo
/
{
(CNenworx(s)
710
\ 708
704
PACKAGE TOS
RF REceWvER 736,
CONTROLLER 738
LOCKING MECHANISM
740
FIG. 7
‘SENSORS 70d
Actinerer || Grroscore(s)] GPS Senson(s)]
m2 Lo m4 6
PitoT STATIC ‘OPTICAL
Tupes ‘SENSOR(S)
218 720
U.S. Patent Feb. 14, 2017 Sheet 13 of 14 US 9,567,081 B1
RECEIVE SENSOR DATA TO DETERMINE FLIGHT DATA AND
GEO-LOCATION DATA OF THE UAV AND THE PACKAGE
802
DETERMINE A PRECETERMINED FORCE THAT CAUSES THE
PACKAGE TO FOLLOW A SUBSTANTIALLY VERTICAL
DESCENT PATH BASED AT LEAST IN PART ON THE SENSOR,
pata 804
‘CAUSE A LAUNCH MECHANISM TO APPLY THE
PREDETERMINED FORCE TO THE PACKAGE TO TRAVERSE
THE PACKAGE FROM THE UAV AND COMMENGE A
SUBSTANTIALLY VERTICAL DESCENT PATH
806
MONITOR THE VERTICAL DESCENT PATH OF THE PACKAGE
BASED AT LEAST IN PART ON SENSOR DATA,
808
IDENTIFY A SIDE OF THE PACKAGE BASED ON A UNIQUE
MARKING AND ASSOCIATE THE SIDE WITH A CONTROL
‘SURFACE DEPLOYMENT
810
DETERMINE A SEQUENCE OF DEPLOYING ONE OR MORE
CONTROL SURFACES ON THE PACKAGE THAT ALTER THE
VERTICAL DESCENT PATH OF THE PACKAGE
812
TRANSMIT A SIGNAL TO THE PACKAGE INDICATING THE
‘SEQUENCE FOR DEPLOYING THE ONE OR MORE CONTROL
SURFACES
B14
FIG. 8
. Patent Feb. 14,2017 Sheet 14 of 14 US 9,567,081 B1
RECEIVE AN RF SIGNAL FROM A UAV TO DEPLOY ONE
(OR MORE CONTROL SURFACES:
902
DEPLOY THE ONE OR MORE CONTROL SURFACES TO
CAUSE A CHANGE IN TRAJECTORY OF THE PACKAGE
904
FIG. 9
US 9,567,081 BI
1
MANEUVERING A PACKAGE FOLLOWING
IN-FLIGHT RELEASE FROM AN
UNMANNED AERIAL VEHICLE (UAV)
BACKGROUND
Historically, package delivery systems rely on a spoke
hub distribution model. For example, to ship a package
between an origin and destination, a vehicle has to pick-up
the parcel and deliver i toa sorting center before commenc-
ing a final delivery destination. This model works well for
resiucing the cost of shipment when iti possible to aggre-
ate packages that share a big pat ofthe joumey from or
to destination. However, it becomes inelicient, if the ability
‘0 aggregate packages is diminished because of a ek of
proximity between delivery destinations. Further inellicien-
‘ies are apparent when transportation infrastructure ise
‘does not allow for direct rates between an origin and
sdestiation,
‘The tse of Unmanned Aerial Vehicles (UAV) can over
‘come some ofthese inellciencies by leveraging more fex=
ible aerial transportation paths between destinations, rather
than eying on rigid road infrastructure, Flexible fight plans
allow for more diret delivery roles, and in some cases, an
‘aggrezation of more puckages that share delivery destina-
tions that are in close proximity to one another. However, the
use of UAVs presents their own inelliciencies. In onder t0
\dlivera package o a destination, a UAV is required to ‘drop
‘off the package, Traditionally, this involves the UAV land»
ing atthe destination, releasing the packoge, and then taking
‘off to its next destination. The sequence of landing and
taking off for each package delivery creates ime and energy
resource ineficiencies, which negate atleast a portion ofthe
beneit of adopting a nctwork system of UAV.
BRIEF DESCRIPTION OF THE DRAWINGS
“The dotiled desertion is deseribed with reference to the
socompanying figures In the figures, the left-most digits) of
‘a reference number identifies the figure in which the refer
fence number frst appears. The same reference numbers in
‘ifferent figures indicate similar oF identical items.
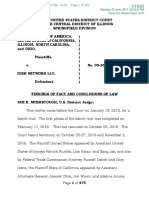
FIG.1 isa pictorial low diagram of an illustrative process
‘of forcefully propelling package from an Unmanned Fight
Vehicle (UAV) while the UAV'is still in motion. FIG. 1
further ilustrates causing the package to adopt a vertical
‘descent path from the UAV, wile also causing the package
‘o deploy a conteol surface 10 manenver the package in an
Jnended direction prior to landing
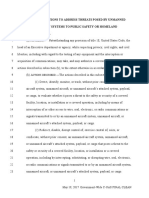
FIGS, 2A and 2B are pictorial flow disgrams of an
ilustrative launch mechanism on a UAV forcefully propel-
Jing a package from the UAV: In FIG. 28, the package is
‘attached onto the UAV is @ transportation configuration. [a
FIG. 2B, the launch mechanism applies @ foree onto the
package, forefully propelling the packoge from the UAV.
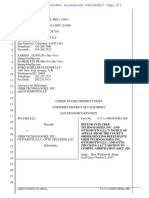
FIGS. 3A, 3B, and 3C are pictorial flow diagrams of an
‘ustative package launch mechanism that uses a parachute
to forcefilly Taunch the package from the UAV. In FIG. 3A,
«a parachute is deployed from a side of the package to force
the package to slide along a guide ral of the UAV. In FIG.
3B, the force generated by the parachute causes the package
tw dislodge from the UAV. In FIG. 3C, the parachute
disiodges from the package, causing the package to com-
rence its vertical descent trajectory
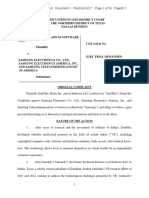
FIGS. 48, 4, and 4C are pitoral flow diagrams of an
ithstrative package lanch mechanism that includes a lever
‘arm, The lever arm can amplify the release force that is
0
o
2
nominally generated by the motion of a coupling stucture
along the UAV guide rail, In FIG. 44, the package is
attached onto the lever arm ina transportation configuration.
In FIG. 4B, the launch mechanism applies a force onto the
package by moving the coupling structure along the guide
‘il and rotating the lever arm about is pivot point. FIG. 4C
illustrates a side elevation view of @ UAV with a wite coil
assembly. In some embodiments, the package can be
‘attached toa coil of wire that can lower the package lowards
found level. FIG. 4C further depicts an embodiment
‘wherchy the cil of wire is secured onto a flywheel assembly
that mites in a circular motion, In doing so, the circular
votion of the coil of wire ean initiate a entripetal force 08
the package that progressively increases while the package
is lowered, FIG. D illustrates a botiom plan view of the coil
of wire, flywheel, and electric motor assembly tha is used
{o generate the centripetal larce on the package, Nowe that
the main body of the UAV’ is omited from FIG. 4D for
clarity
TFIGS, 8A through SG illastrate pockage tht includes 3
plurality of control surfaces. FIG. SA illustates a side
clevation view of the package. The package includes @
unique marking on each side surface and a plurality of
control surfaces that may be deployed to change a direction
ofthe package doring freefall the ground, FIG. 5 further
illustrates a deployment of one or more control surces.
FIG. SB isa top plan view of the package tha illustrates the
‘unique marking onthe ld of the package anda top plan view
of the plurality of coateol surfaces. FIG. SC illustrates a side
‘levation view ofthe package wih top side ctrol surfaces
that deploy from a lid of the package. FIG. 5C furher
illustrates one top side control surface in a deployed posi-
‘ion, and one top side control surface in a stowed position.
FIG. 8D isa top plan view of four top side control surfaces
installed on the package, FIG, SE illysteats a side elevation
view ofthe package with a plurality of vertical fins. FIG. SF
illustrates 2 top plan view of package with four vertical fins.
FIG, SF Taner illustrates to verical fins in a deployed
position and two vertical fins ina stowed position. FIG. 5G
illystrates side elevation view of the package with
plurality of parachutes in deployed position.
FIGS, 6A and 62 illustate an example pockage that
includes a plurality of eompressed ait canisters. FIG. 64 is
4 side elevation view of a package that includes a color
imprint on each side surface and s plurality of compressed
air canisters attached 0 each side of the package. FIG, 63
is top plan view of the package that illustrates a color
int on a lid ofthe package and a top plan view of the
plurality of compressed air canisters atached to each side of
the package
FIG. 71s a block diagram of components of an example
package launeh controller that supports package delivery by
fan unmanned aerial vehicle.
FIG. Bs a flow diagram of a package delivery system on
‘an UAV causing the lninch of « pockage. The flow diagram
further describes monitoring the descent of package 10
transmitting signals to deploy contol surfaces on the pock=
‘ge to ensure safe delivery to the delivery destination,
PIG. 9 is a ow diagram of package reveiving an RF
signal from a UAV and deploying one or more control
strfaces in response to the RF signal
DETAILED DESCRIPTION
‘This disclosure provides a package delivery system that
forcefilly propels packages from an unmanned serial
vehicle (UAV), while the UAV isin motion. The UAV eaa
US 9,567,081 BI
3
apply a force onto the package that is sufcient to alter the
descent trajectory ofthe package from a parabolic path 1 3
vertical descent path
fs package is dropped from the UAV, while the UAV is
jn motion, the descent path of the package will Zllow
parabolic trajectory unless the package is forcefully ejected
‘or released from the UAV. The slope of the parabolic
trajectory is influenced by the acceleration of the UAV at the
time the package i released, Toa lesser extent, ar resistance
Jn the form of drag and wind can also affect the shape and
slope of the descent path. This disclosure deseribes a number
‘of Ways by Which a force ean be applied onto the package
at the time the package is released from the UAV. The
‘applied Tore is intended 1 be equal aad opposite the
soceleration of the UAV motion such that the resulting
package descent path isa verical descent trajectory
Atechitical advantage of incorporating package delivery
system info a UAV is that the sequence ofa UAV landing and
taking off for each package delivery can be eliminated,
thereby creating time and eneruy resouree efficiencies that
Improve the benefit of adopting a network system of UAVS.
Fanher, an ability to cause a pockage to descend through
vertical trajectory rather than a parabolic trajectory can be
advantageous when attempting a delivery in an area with
Timited open space, such a an alley ora fenced back yard
In sonie embodiments the packoge ean include a unique
marking on a plurality of extemal surfaces. The unique
‘marks on each side surface ofthe package can be different
‘nolo. An advantage of using different colors is that when
viewed from the UAV, the UAV cam confirm the trajcctory
path ofthe package by determining which unique marks of
the package that are visible through an optical seasor. In
various examples, the UAV can transmit insiuctions to the
package via a radio frequency (RF) transmitter, The instric-
tions ean include deploying one or more control surfaces
that area part of the package. In various examples, the one
‘oF more contol surfaces can inchude fat panes that proteade
into the airstream to genemte a dmg force. In some
‘examples, the ane or more control surfaces may retain an
Birfoil erost-scction, similar to flaps and slats on a fixed
‘wing sirerat. In other examples, the one or more contol
surfaces can include parachutes, or compressed air canisters
‘As discussed in more detail below, the one or more control
surfaces can alter the vertical descent path ofthe package to
avoid obstrctions, such as tees, o other structures such a5
‘carports, balconies, power lines, eaves, etc. In other
‘examples, the vertical descent path ean be altered 0 slip the
package onto a baleony of high-rise building
The techniques, apparatus, and systems described herein
may be impletiented in a number of ways. Example imple-
mentations are provided below with reference tothe follow=
ing figures,
TFG. Lisa pictorial low diagram that illustrates process
‘of forcefully propelling a package from a UAV 102 while in,
‘mation to deliver the package 104 to a destination that is
direcly beneath the UAV. The UAV 102 can be winged
craft, a rotor-cralt, or hybrid airerat that is capable of
transporting packages by air from an origination location
(oat fulillment center or near fulillment center) to 2
‘destination and returning (0 the exignation location
“Atblock 106, the UAV 102 can be loaded with a package
104 for delivery to a destination. In some examples, the
package ean be couple! io. package launch mechanism that
Js part ofthe UAV 102. As described in more deal in FIG.
2. the package launch mechanism can apply a force onto the
package atthe time the package is released from the UAV
0
o
4
102. In some examples, the applied foree ean alter the
descent trajectory of the package:
‘At block 108, the UAV’ 102 can release the package while
the UAV is in motion and flying at « particular ali. in
some examples, the particular altitude ean range from 10-20
fect above the delivery destination, In other examples, the
particular altitude can be 500 ft above the delivery desti-
pation. At lock 108, the UAV 102 caa apply a release force
‘onto the package, via a package launch mechanism. The
release force can be substantially equal and opposite 1 a
ore that is equivalent tothe acceleration ofthe UAV 102.
Indoing so, resultat force on the package 104 can cause the
escent irjectory of the package 104 0 change from a
parabolic trajectory that runs in the direction of the UAV
102, 10a vertical descent trajectory
various examples, the foree applied onto the package
canbe isles than or greater than a Force equivalent to the
feceleration of the UAV 102. In one non-limiting example,
the UAV 102 may be lying into a headwind. Ahesdwind ean
aller the shape of the package descent pat from a parabolic
trajectory t0 a more venical descent path. In this example,
the free applied onto the package can be reduced by
compensating for the change in descent path that has been
‘aus by the heading, Alternatively, the UAV 102 may be
‘ying into tiv, which causes the shape ofthe package
descent path 10 select a longer parabolic trajectory. In this
sltemate example, the force applied onto the package can be
increased to negate the effet of the tail wind as well as the
acceleration of the UAV 102
Tn some examples, the release force applied onto the
package can be vari to compensate for other factors, sich
as aerodynamie drag on the package. In various packages
packages can he subject to acrodynamic dag. Aerodynamic
drag can cause a package to decelerate in a horizoatal
direction, thereby creating a steeper parabolic descent pats
than what would normally oecur in the absence of sueh drag.
‘Therefore, a consequence of the deceleration is that the
release force applied by the UAV 102 can be reduced by
compensating forthe change in the descent path that has
been caused by the aerodynamic drag.
Tn various examples, the amount af rlesse force applied
by the UAV 102 can be proportional tothe surface area of
the package 104 that is perpendicular to the horizoatal
motion of the UAV 102. For example, the amount of
deceleration caused by aerodynamic drag is proportional to
the surface area of the package that is perpendicular to the
horizontal motion of the UAV 102, Therefore, a package
with a Targe surface area that is pespendicular to the hor
‘onial motion of the UAV 102 can induce a signifeant
amount of drag, causing the descent path ofthe package 10
tend more closely towanls 2 vertical descent path. AS a
result, the release foree applied by the UAV 102 ean be
further redueed by compensating for the aerodynamic drag
caused by a larger surface area.
Moreover, at block 108, an advantage of applying a
release force onto a package 104 js that an equal and
‘opposite reaction force is applied onto the UAV 102. The
reaction force occurs ina diction that eomesponds to the
horizontal motion of UAV 102, Therefore, by applying @
release force onto the package 104, UAV 102 can receive
boost of acvelertion in its diretion of motion. The boost of
scceleration ean assist the UAV 102 to climb to a higher
fruise akitude oF accelerate at the current ruse atime
towards its next destination
‘AU lock 110, the UAV 102 ean monitor the descent path
of the package 104 ean cause a deployment of one or tare
control surfaces that adjust the descent path of the package
US 9,567,081 BI
‘ean include fat panels that protrude ino the airstream {0
tener a drag force. In some examples, the one oF more
‘contol surfaces may retain an airfoil cross-soetion, simi
to flaps and slats ona fixed wing areraft In other examples,
the one or more control surfaces can include parachutes, oF
‘compressed air canisters. In some examples, the vertical
‘descent path can he altered to avoid obstructions, such as
twos, or other structures such as carports. In some examples,
the UAV 102 can be equipped ‘with a midio frequency
transmitter that can transmit radio signal to the package
104, The radio signal ean cause the deployment of the one
‘oF more contol surfaces
In some examples, the UAV 102 can be further equipped
‘with one oF more optical sensors, such asa digital camera,
that monitors the packave 104 during its descent. As cise
‘cussed in more detail below in FIG. 5, the optical sensors
‘ean monitor a view of unique marks of the package In some
‘examples, the package 104 can inlude unique marks on
‘each fop, bottom, aod side surface. The unique marks oa
‘each surface canbe different in eolor, such that when viewed
via an optical sensor of the UAV 102, the UAV 102 can
discom a descent trsjectory based on which colors are in
view. For example, if the optical sensors intermittently view
some unigue marks, the UAV 102 may deduce that the
package 104 is spinning. In sponse, the UAV 102 may
‘deploy all control surfaces to stabilize the package descent
mother examples, based on the unigue marks that ean be
viewed fom the UAV 102, the UAV 102 may determine that
the package is Iikely to strike-an obstruction, In response, the
AV 102 may deploy one or more control surfaces that
ide the package toa safer ground location away from the
‘obstruction. For example, when a contml surface is
‘depleved, a portion of the control surface protrudes int the
sista, During descent, the protruding portion of the
‘contol surface generates drag. The drag subsequently aets
as an upward force on the package, causing the package 10
pivot about its center of gravity and ultimately change
trajectory.
FIGS, 2A and 28 are pictorial flow diagrams of a UAV.
202 camying a package 204 and forceflly propelling the
package 204 from the UAV 202 via a lanneh mechanism. Ia
Various examples, the Lauach mechanism can include &
uide rail 206, « coupling structure 208, and an actuator
‘device 210, In some examples, the guide ral 206 ean be
rigidly attached onto the UAV 202. The guide rail 206 can
‘comprise ofa longitudinal member having a uniform cross
section, In various examples, guide ral can be attached 10
the UAV 202 at each end position. The coupling structure
208 can act 38 an interface between the package 204 and the
UAV 202, by interfacing with the package 104 ad the ide
rail 206. The coupling sirucure 208 can include a release
Joint that interfaces with the package 204, For example, ia
response to being subjected to a particular foree, the cow-
pling structure 208 may dislodge from the package 204. In
Various examples, the release joint may ‘comprise of
pre-lensioned clamp. In other examples, the release joint
may comprise of a bal-socket join. In both examples, 2
particular amount of force can ease the pre-tensioned
‘lamp 19 open oF the bal iting w dislodge from a corre
sponding socket joat. In some examples, the release force
‘ean correspond io the release force that is applied to the
package to alter the escent path ofthe package to a vertical
‘descent trajectory.
In some examples, a cross-section ofthe coupling struc
ture 208 can incinde an eperture that is complementary to at
least a portion of the guide rail 206 cross-section. In this
0
o
6
‘example, the guide rail 206 can be slotted into the aperture
of the coupling structure 208, allowing the coupling steve
ture 208 ro traverse along the length ofthe guide rl 206
In some examples, the launch mechanism can iachade an
actutor device 210. As illusiated in FIG. 2B, the aetwator
‘device 210 can cause the eoupling structure 208 to remain ia
a fixed positon slong the guide rail 206 during a transpor-
tation phase of the package delivery. As illustrated in FIG.
2A, the fixed position can eorespond to a position at the
Tongituinal center ofthe guide ril 206,
Tn some examples, the setuator device 240 can eause the
coupling srvcture 208 and stacked package 204, wo accel-
crate along the guide rail 206 froma fist position io a second
positon, In the illustrated example, the first position can
forrespondl to a position at the longitudinal center of the
ide rail 206. Funber, the second positon can correspond
an end position ofthe guide rail 206. In various examples,
the foree applied by the actuator device 210 to the coupling
structure 208 can coerespond to the force tat is required 10
dislodge the package 204 from the coupling stueture 208, la
some examples, the force applied by the actuator device 240
fan also correspond tothe Torce that i intended 0 alter the
package 204 descent path from a parabolic trajectory t0 a
vertical trajectory
In various examples, the actuator deviee 210 can eom-
prise of a pneumatic actuator 2 spring actuator or any other
actuator device that is configured to store and release kinetic
fenergy within a predetermined period of time, In some
‘examples, the period of time i proportional tothe force that
{sto be generated by moving the coupling strcture 208 over
the guide rail 206,
‘In some examples, the launch mechanism can comprise
‘only of 2 guide ral 206 and the coupling structure 208.
Rather dian including an actuator device 210 to forcefully
propel the package 204, the Inunch mechanism can inelude
flecim magnets on the guide rail 206 and the coupling
structure 208, In some examples, the force required to propel
the package 204 from the UAV 202 can he applied by
causing eurtent to flow through the electro magnets, In this
‘ample, the amount of force applied onto the coupling
Structure 208" is proportional t the cunent that flows
through the clectromagncs
‘In other examples, the force required to propel the pack:
‘age 204 from the UAV 202 can be generated by compressed
air canisters, In other examples, the force can be generated
‘using a controlled explosion
‘In various examples, he release force applied! onto the
coupling sieuture 208, by one of the actuator device 210 or
lectromagnets can cause an equal and opposite reaction
force tobe applied onto the UAV 202. In some examples, the
reaction force can oecur ina direction that corresponds to the
horizontal motion of UAV 202, Therefore, by applying @
release foree ont the package 204, the UAV 202.can receive
‘boost of acceerati in is direction of motion. The boost
‘of acceleration can assist the UAV 202 to climb to a higher
fenvise altude or accelerate at the current cruise aline
towards its next destination
FIG, 3 isa pictorial view of a UAV 302 carrying apackage
304, and forcefully propelling the package 304 from the
‘UAV 302 via a Jauich mechanism. In vatious examples, the
Jaunch mechanism ean inelade a guide rail 306, a coupling
structure 308, anda pareehute 310. In some examples, the
ude rail 3106 can correspond to guide ril 206. The guide
rail 306 can comprise of longitudinal member having a
‘uniform cross-section, In varios examples, the guide rail
306 cat be attached to the UAV 302 at each end positon
US 9,567,081 BI
1
The coupling structure 308 can correspoad to coupling
structure 208. la various examples, the coupling structure
‘can acts a& an interface between the package 304 and the
UAV 302, by interfacing berween the package 304 and the
guide rail 306, The coupling structure 308 ean include a
Felease joint that interfaces wih the package 304, sich as but
ot limited to pre-tensioned clamp or ball socket join.
In some examples, the lainch mechanism can also include
a parachute 310. The UAV’ 302 ean cause parachute 310 1
‘deploy once the UAV 302 is at particular altitude over the
delivery destinaGon. In some examples, the UAV 302 ean
Jnclude un electronic parachute deployment system, which
‘causes the parachute to deplay a atime when the UAV 302
js a the particular altitude over the delivery destination. Ia
‘other examples, the parachute 310 ean be mechanically
‘deployed by pulling a release cordon the parachute 310. Fo
‘eximple, the launch mechanism can include an actuator
‘device 312 that causes the coupling structure 308 to traverse
slong the guide rail 306. In some examples, the release cord
‘on the parachute 310 cin he coupled Wo a fixed position oa
the UAV 302 such that a predetermined displacement of the
‘coupling structure 308 along the guide rail 306 can eause the
Parachute 310 to mechanically deploy.
In various examples, the seustor device 312 can eore-
spond to aetustor device 210. The actuator device 312 can
‘comprise of pneumatic aetwator, spring aetator, oF any
‘other actuator device that is configured to store and release
Kinetic energy within a predetermined time period,
‘In various examples the paruchute 310 is deployed while
the UAV’ 302 is still in motion, Therefore, since the para-
‘chute 310 is deployed inthe horizontal plane, the parachute
310 can generate a drag force that is equal and opposite t0
fa force equivalent to the socelertion of the UAV 302. In
doing s0, the esulaat force on the package 304 can cause
the descent trajectory of the package 30M to change from a
parabolic trajectory that uns in the direction of the UAV
5302, to a vertical descent trajectory.
‘Moreover, unlike the release force applied by actuator
devices deseribed in FIG. 2, the drag force genersted by the
parachute 310 does not cause a boost in acceleration that
sss the motion ofthe UAW 302, This i because the UAV
302 does not apply the release foree onto the package 308
Instead, the drag force is generated aerodynamically by the
deployment of the parachute 31,
In various examples, the drag force generated by the
parachute 310 ean also correspond (0 the foree required 10
‘dislodge the package 304 from the coupling structure 308 of
the UAV 302, In some examples, the parachute 310 can be
dislodged from the package at the same time the package
04s dislodged from the coupling structure 308 ofthe UAV
302. In doing so, this ensures thatthe deceleration applied to
the package 304 is equal and opposite w the horizontal
‘acceleration of the UAV 302,
Tn some examples, the parachute 310 can remain atached
to the package 304 after the package 304 is dislodged from
the coupling structure 308 of the UAV’ 302. In doing so, the
parachute 310 can cause the package 304 to further decel-
‘erate in the vertical direction during its descent,
FIGS. 4A and 4B are pictorial flow diagrams of a UAV
402 carrying a package 404 and forcefully propelling the
package 44 from the UAV 402 via launch mechanism that
‘nchides a lever arm. In various examples, the launch
mechanism can include a puide rail 406, lever arm pivot
structure 408, an actuator device 410, a lever arm 412, and
‘package attachment sticture 414, An advantage of includ
ing a lever arm 412 as part of the lanching mechanist is
that the release force generated by a linear motion of the
8
package 404 along the guide cal 406 can be proportionally
famplified by the pivoted length of the lever am 412.
Therefore, if a pockage 404 requires a release force that
cexcoods the capability ofa launch mechanism, as deseibod
in FIGS, 2 and 3, the lever arm configuration, as deseribed
in FIGS. 4Aand 4B, ean be used to amply the release force
capability ofthe launch mechanism.
Ta the illustrated example of FIGS. 4 and 4B, the guide
rail 406 can correspond to sce rail 206 and 306, The guide
rail 406 can comprise of longitudinal member having @
‘uniform eress-seetion. The guide rail 406 ean be attached 10
the UAV’ 402 at each end position.
‘In the illstrated example, the lever arm pivot stcture
408 can provide an interface between the UAV 402 and the
Jever stm 412. The purpose ofthe lever arm pivot stectore
408 is two-fbd. First, the lever arm pivot structure 408 ca
‘move along the guide rail 406 to generate a release force that
js ultimately transferred to the package 404 at a point of
release. The cross-section of the lever arm pivot structure
408 can include aa aperture that is complementary oat least
portion ofthe guide rail 406 cross-section. In this example,
‘the guide rail 406 can be slotted through the perture ofthe
lever sem pivot strture 408, such thatthe lever am pivot
structure 408 can move unimpeded along the length the
ide rail 406,
Second, the lever am pivot streture 408 can provide a
platlorm to cause a rotation of the lever am 412. For
‘example, the lever arm pivot structure 408 can include 3
Spring coil 416 that can cause the lever arm 412 to pivot
downwards. In doing so, the rotation ofthe lever arm 412
fan amplify the release force that is nominally generated by
the horizontal movement of a lever ama pivot siruetire 408
along the ge eal 406
the illustrated example, the launch mechanism can also
include an actuator device 410. In some examples, the
actuator device 410 can comespond to aetuator device 210
and 312. In some examples, the actuator device 410 can
cause the lever arm pivot structure 408 to aecelerate along
the guide rail 406 from a fist position atthe longitudinal
center of the guide rail 406 t0'2 second position that ean
torrespond to an end positon of the guide rail 406,
‘In the illustrated example, the launch mechanism can also
include a package attachment structure 414. The package
attachment structure 414 ean couple te package 404 to the
lever arm 412. The package attachment sirueture 414 can
comprise ofa release joint such as a pre-tensioned clamp oF
ball socket joint. In various examples, the release joint ean
‘uncouple the package 404 from the lever arm 412 at
predetermined force that is equivalent tothe release foree of
the package 404,
‘In various examples, the combined elect of the lever arm
pivot structure 48 moving slong the guide rail 406, and the
lever arm 412 pivoting about the lever arm pivot stucture
408 can eause an amplified release force to be applied onto
the package 404 ut a point of release. Moreover, the release
ore that is ultimately plied onto the package can enuse
‘an equal snd opposite reaction force wo be applied onto the
UAV 402. In some examples, the rection foree ean occur in
direction that corresponds tothe horizontal motion of UAV
4402. Therefore, by applying release foree onto the package
4404, the UAV 402 can receive @ boost of acceleration i its
rection of motion, The boost of acceleration can assist the
VAY 402 to climb toa higher euise altitude or accelerate at
the current cruise altitude towards its next destination,
FIG. 4C illustrates a pictorial fow diggram ofa UAV 402
playing a package 404 vis an attached line 41% In various
‘examples a line 18 can include, buts nt limited to, Wire,
US 9,567,081 BI
9
‘cable, or sting. Inthe illustrated example, the UAV 402.
‘can include a coil 420 of wire 418 that lowers the package
(o height at which the package 404 is released. In some
‘embodiments, the UAV 402 may lower the package 404 t0
ground level. In other embodiments, the UAV’ 402 may
lower the package to particle releavealtitde at which the
package 404 js released while the UAV 402 is still in motion.
In various examples, the coil 420 of wire 418 can sacl
‘onto flywheel 422 ofthe UAV 402. As depicted in FIG. 4D,
the flywheel 422 may be furler coupled to an electric motor
424 that is secured to the underside of the UAV 402, The
‘eleciic motor 424 can cause the lywheel 10 rotate about its
rotational axis, In doing 40, the rotation of the flywheel
results in the attached coil 420 rotating about the same
rotational axis of the flywheel. In various examples, the
‘irelar mation ofthe coil 420 ean initiate a centripetal force
‘onthe package 40 while the package 404 is attached to the
Wire 418, As the package 404 is progressively lowered by
the wire 418, the package 404 descent path begins to follow
progressively lamer spins, whieh cause the centripetal
ores on the package 404 to progressively inerease. This
‘ction causes the system fo operate similar fo a “slingatoa"
lnunching mechanism.
In some examples, the UAV 402 can release the package
404 in the direction that is opposite to the motion of the UAV.
4402, The acceleration force applied onto the package 404 a
the point in time in which the packsge 404 is relessed is
developed directly liom the generated centripetal force. In
some examples, the point in time in which the package 404
Js released is based on producing an acceleration foree on the
package 404 that is equal and opposite to the acceleration
fore the UAV 402. Asa result the package 404 may follow
a vertical descent path to an intended delivery destination
Further, by applying an acceleration force onto the package
4404, the UAV 402 can receive a boost of acceleration in its
‘direction of motion, The boost of aoceleration ean assist the
UAV 402 to climb toa higher cruise altitude or accelerate at
the current cruise altitude towards its next destination,
TFIGS, SA through to 5G illestrate various types of pack
‘ages S02 that can be deployed by a UAV 102, 202, 302 oF
402, In various examples, the package 502 can include
plurality of sidewalls that combine to form a receptacle in
between and an opening ata top rim. In various examples,
items for delivery can be securely positioned withia the
receptacle of the package $02.
In various examples, items for delivery can be placed
within the receptacle ofthe package 802 in such a way that
the package 502 is bortom heavy. A bottom heavy weight
You might also like
- AirbnbDocument19 pagesAirbnbCNET NewsNo ratings yet
- US Chamber of Commerce v. City of SeattleDocument28 pagesUS Chamber of Commerce v. City of SeattleCNET NewsNo ratings yet
- Omplaint With URY EmandDocument69 pagesOmplaint With URY EmandCNET NewsNo ratings yet
- UN ReportDocument78 pagesUN ReportCNET News100% (4)
- Proper Media's Complaint Against SnopesDocument24 pagesProper Media's Complaint Against SnopesCNET NewsNo ratings yet
- Snopes Complaint Against Proper MediaDocument23 pagesSnopes Complaint Against Proper MediaCNET NewsNo ratings yet
- Qulacomm Public Interest Reply July 24 2017Document7 pagesQulacomm Public Interest Reply July 24 2017CNET NewsNo ratings yet
- Candy Lab Wisconsin Preliminary Injunction Order Augmented Reality GamesDocument27 pagesCandy Lab Wisconsin Preliminary Injunction Order Augmented Reality GamesCNET NewsNo ratings yet
- Internet Trends 2017 ReportDocument355 pagesInternet Trends 2017 ReportCNET NewsNo ratings yet
- Dish Network Telemarketing JudgmentDocument475 pagesDish Network Telemarketing JudgmentCNET NewsNo ratings yet
- Whitefish Complaint FinalDocument63 pagesWhitefish Complaint FinalBillSchmalfeldtNo ratings yet
- CEOs Urge President Trump To Remain in Paris AccordDocument1 pageCEOs Urge President Trump To Remain in Paris AccordCNET NewsNo ratings yet
- James B. Comey StatementDocument7 pagesJames B. Comey StatementYahoo News100% (6)
- Uber-Waymo Page Deposition Ruling 7:10:17Document3 pagesUber-Waymo Page Deposition Ruling 7:10:17CNET NewsNo ratings yet
- 702 Letter 201705 FINALDocument3 pages702 Letter 201705 FINALCNET NewsNo ratings yet
- Official Actions To Address Threats Posed by Unmanned Aircraft Systems To Public Safety or Homeland SecurityDocument10 pagesOfficial Actions To Address Threats Posed by Unmanned Aircraft Systems To Public Safety or Homeland SecurityApril GlaserNo ratings yet
- Tech Companies' Amicus BriefDocument52 pagesTech Companies' Amicus BriefmolliereillyNo ratings yet
- Customs and Border Protection Summons To TwitterDocument5 pagesCustoms and Border Protection Summons To TwitterCNET NewsNo ratings yet
- Uber Appeals Arbitration Ruling in Waymo LawsuitDocument2 pagesUber Appeals Arbitration Ruling in Waymo LawsuitCNET NewsNo ratings yet
- Zenimax V SamsungDocument39 pagesZenimax V SamsungBrian CrecenteNo ratings yet
- Waymo Motion For Preliminary InjunctionDocument30 pagesWaymo Motion For Preliminary InjunctionCNET NewsNo ratings yet
- Uber Motion For Arbitration in Waymo Lawsuit DeniedDocument10 pagesUber Motion For Arbitration in Waymo Lawsuit DeniedCNET NewsNo ratings yet
- Apple's Letter To California DMV Requesting Clarifications To Test Protocol DocumentationDocument3 pagesApple's Letter To California DMV Requesting Clarifications To Test Protocol DocumentationMike WuertheleNo ratings yet
- Official Actions To Address Threats Posed by Unmanned Aircraft Systems To Public Safety or Homeland SecurityDocument10 pagesOfficial Actions To Address Threats Posed by Unmanned Aircraft Systems To Public Safety or Homeland SecurityApril GlaserNo ratings yet
- Alsup Order Referring Waymo v. Uber To US AttorneyDocument1 pageAlsup Order Referring Waymo v. Uber To US AttorneyCNET NewsNo ratings yet
- Homeland Security Letter To Sen. Wyden:TwitterDocument2 pagesHomeland Security Letter To Sen. Wyden:TwitterCNET NewsNo ratings yet
- Twitter Complaint Against DHS and CBPDocument25 pagesTwitter Complaint Against DHS and CBPRoberto BaldwinNo ratings yet
- Seattle Uber Union RulingDocument18 pagesSeattle Uber Union RulingGeekWireNo ratings yet
- Uber Complaint Hell SoftwareDocument19 pagesUber Complaint Hell SoftwareCNET NewsNo ratings yet
- Twitter Notice of Voluntary DismissalDocument2 pagesTwitter Notice of Voluntary DismissalAnonymous U9RiYGpGNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)