You might also like
- Chap 08Document62 pagesChap 08ladabd2No ratings yet
- Chapitre 4Document39 pagesChapitre 4ridhajamel100% (1)
- RegulateurDocument6 pagesRegulateurladabd2No ratings yet
- Simulation D Une Boucle de Regulation de Niveau Matlab SimulinkDocument2 pagesSimulation D Une Boucle de Regulation de Niveau Matlab SimulinkAdil Abouelhassan57% (7)
- CodageDocument22 pagesCodageladabd2No ratings yet
- 5 CodageDocument5 pages5 CodageDahir SambouNo ratings yet
- LP213 CoursDocument37 pagesLP213 Coursladabd2No ratings yet
- Cours IntroductionDocument17 pagesCours Introductionladabd2No ratings yet
- Commande - Ascenseur - Matlab - Stateflow Logiciel Manuel Islam PDFDocument5 pagesCommande - Ascenseur - Matlab - Stateflow Logiciel Manuel Islam PDFtamineNo ratings yet
- Chapitre 3Document17 pagesChapitre 3ladabd2No ratings yet
- 6 Asservissement ArduinoDocument13 pages6 Asservissement Arduinoladabd2100% (1)
- M1 ASE Ident1 0405Document4 pagesM1 ASE Ident1 0405ladabd2100% (1)
- Chapitre 4Document39 pagesChapitre 4ridhajamel100% (1)
- Hydraulique Generale 107-139Document33 pagesHydraulique Generale 107-139Soufiane OuassouNo ratings yet
- Rapport de PfeDocument122 pagesRapport de PfeFiras Chaabene100% (3)
- 141 Ec1vent3aDocument11 pages141 Ec1vent3afatma addemiNo ratings yet
- TransmissionDocument156 pagesTransmissionolivierh6580% (5)
- Matériaux IfpDocument64 pagesMatériaux Ifpsinou.25100% (1)
- Diderot Chardin Et La Matiere SensibleDocument18 pagesDiderot Chardin Et La Matiere SensibleJose MuñozNo ratings yet
- Securite Sociale Destinataire: A Fournir Au Plus Tard Le: Même Avec La Mention NéantDocument2 pagesSecurite Sociale Destinataire: A Fournir Au Plus Tard Le: Même Avec La Mention Néantrabah hibouchNo ratings yet
- Malika LahmamssiDocument2 pagesMalika Lahmamssiapi-3701206No ratings yet
- Cours Economie de Projet Tl-2017Document124 pagesCours Economie de Projet Tl-2017jesusatecaoNo ratings yet
- Calorimètre À Vase Dewar 02621: PrésentationDocument8 pagesCalorimètre À Vase Dewar 02621: PrésentationMaria gacemNo ratings yet
- HD 701s ISO B DC00713Document2 pagesHD 701s ISO B DC00713tazjuan1No ratings yet
- (PDF) CORRIGÉS Du Cahier D'exercices Le Nouveau Taxi 2 Carol Dias - Academia - Edu 2 PDFDocument1 page(PDF) CORRIGÉS Du Cahier D'exercices Le Nouveau Taxi 2 Carol Dias - Academia - Edu 2 PDFVika HlukhaNo ratings yet
- Coutume KabylieDocument34 pagesCoutume KabylieSo' FineNo ratings yet
- Feuille D'excercices N 1 Analyse Num EriqueDocument2 pagesFeuille D'excercices N 1 Analyse Num Eriquedouo100% (1)
- ODD Compréhesion PDFDocument10 pagesODD Compréhesion PDFCheikhNo ratings yet
- D4.13.Ch3.Exoconduction2 CorrigeDocument7 pagesD4.13.Ch3.Exoconduction2 Corrigehicham0% (1)
- Cours Mecanique AutoDocument78 pagesCours Mecanique AutoAkram Ferchichi100% (36)
- EDO EDP m1-td5-2020Document4 pagesEDO EDP m1-td5-2020Marc TentiNo ratings yet
- Hour Mohamed PresentationDocument34 pagesHour Mohamed PresentationHamza IBAARARENNo ratings yet
- Illusions D'optiqueDocument2 pagesIllusions D'optiqueThỏTúiNo ratings yet
- Mémoire BABA HASSANE Final PDFDocument127 pagesMémoire BABA HASSANE Final PDFSoumana Abdou100% (1)
- 06 CourbesDocument3 pages06 CourbesTsilaNo ratings yet
- Dossier Projet YaplukaDocument30 pagesDossier Projet Yaplukasteve gael MezuiNo ratings yet
- TD Andre JelicicDocument59 pagesTD Andre JelicicTôha MaïgaNo ratings yet
- Inventaire de La Ferme AubergeDocument2 pagesInventaire de La Ferme AubergeAli SaadNo ratings yet
- La Performance ÉnergétiqueDocument23 pagesLa Performance ÉnergétiqueadilbasmaNo ratings yet
- Les Elixirs Floraux - Livret Conseil DEVA PDF Solitude PeurDocument13 pagesLes Elixirs Floraux - Livret Conseil DEVA PDF Solitude PeurKIUYNo ratings yet
- Projet Urbain A NWDocument20 pagesProjet Urbain A NWwassima mebrekNo ratings yet
- IMFCS01Document39 pagesIMFCS01Dang JinlongNo ratings yet
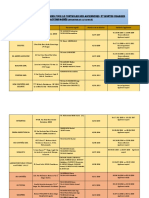
- Liste Agréé ContrôleDocument6 pagesListe Agréé ContrôleMohammed MAAROUFNo ratings yet