You might also like
- Aluminium GMAW GuideDocument32 pagesAluminium GMAW GuideDaniel Salinas100% (2)
- Compressed Air Pipe SystemDocument9 pagesCompressed Air Pipe Systemkeanncruz100% (1)
- A Laboratory Report: Protein ExtractionDocument9 pagesA Laboratory Report: Protein ExtractionNadine RebolledoNo ratings yet
- Workshop 02.1: Aqwa Basics - Hydrodynamic DiffractionDocument45 pagesWorkshop 02.1: Aqwa Basics - Hydrodynamic DiffractionSahil JawaNo ratings yet
- Quantification of Permeability Heterogeneity For Reservoir Uncertainty QuantificationDocument17 pagesQuantification of Permeability Heterogeneity For Reservoir Uncertainty QuantificationGeociencias GaiaNo ratings yet
- Reynolds-Averaged Navier-Stokes EquationsDocument3 pagesReynolds-Averaged Navier-Stokes EquationsMirko GraneseNo ratings yet
- 1011 Chapter 3Document38 pages1011 Chapter 3Eman Sarmiento0% (1)
- Refrigeration System PDFDocument39 pagesRefrigeration System PDFSiti Hajar Shamsul Kamar86% (7)
- MECH3780 Fluid Mechanics 2 and CFDDocument31 pagesMECH3780 Fluid Mechanics 2 and CFDninibear100% (1)
- Fluid Mechanics BEL L5Document26 pagesFluid Mechanics BEL L5whateverNo ratings yet
- Nose Cone Design 2 PDFDocument76 pagesNose Cone Design 2 PDFgssrrajuNo ratings yet
- Turbulence Modeling CFDDocument40 pagesTurbulence Modeling CFDDeniz ümit BayraktutarNo ratings yet
- Observation 1Document9 pagesObservation 1Sahar NasrallahNo ratings yet
- Turbulence Modelling: Instructor: Dr. Essam WahbaDocument40 pagesTurbulence Modelling: Instructor: Dr. Essam WahbaahmedaboshadyNo ratings yet
- T Rans E: HE QuationsDocument35 pagesT Rans E: HE QuationsAlexandre PereiraNo ratings yet
- Turbulence Models: Dr.N.V.Mahalakshmi Asst Professor, Department of Mechanical EngineeringDocument24 pagesTurbulence Models: Dr.N.V.Mahalakshmi Asst Professor, Department of Mechanical EngineeringinfomechNo ratings yet
- Quarks Gluons and LatticesDocument33 pagesQuarks Gluons and LatticesAbhijeet KishoreNo ratings yet
- Applied Computational Fluid DynamicsDocument33 pagesApplied Computational Fluid DynamicsAnand PathakNo ratings yet
- Computational Engineering: Tackling Turbulence With (Super) ComputersDocument15 pagesComputational Engineering: Tackling Turbulence With (Super) ComputersCarlos Aparisi CanteroNo ratings yet
- IntroComputationalAero Webinar RevisedDocument58 pagesIntroComputationalAero Webinar RevisedMichael GabalisNo ratings yet
- Acm 40740 Jan2016 v2 PDFDocument195 pagesAcm 40740 Jan2016 v2 PDFabdul majeedNo ratings yet
- CFD Essentials Lec 02Document5 pagesCFD Essentials Lec 02r9016699No ratings yet
- Lectures For ES912, Term 1, 2003.: December 7, 2003Document18 pagesLectures For ES912, Term 1, 2003.: December 7, 2003getsweetNo ratings yet
- Nov15 cs533d SlidesDocument8 pagesNov15 cs533d SlidesNamelezz ShadowwNo ratings yet
- Salman Mid SemDocument12 pagesSalman Mid SemxxxxsalmanNo ratings yet
- Chapter 4 Part 1Document11 pagesChapter 4 Part 1aoauaz2000No ratings yet
- CIF Descrption An Usage PDFDocument14 pagesCIF Descrption An Usage PDFLiendo Polanco GustavoNo ratings yet
- Turbulence Models in CFD: University of Ljubljana Faculty For Mathematics and Physics Department of PhysicsDocument18 pagesTurbulence Models in CFD: University of Ljubljana Faculty For Mathematics and Physics Department of PhysicsLes MilesNo ratings yet
- Turbulence Modeling For BeginnersDocument20 pagesTurbulence Modeling For BeginnersRavi Duggirala100% (1)
- Plate Analysis GuideDocument20 pagesPlate Analysis GuideDobromir DinevNo ratings yet
- 16ECEE - Fajfar PeterDocument62 pages16ECEE - Fajfar PeterHaluk SesigürNo ratings yet
- Obs SlidesDocument34 pagesObs SlidesHankNo ratings yet
- JHU-SPH Modeling of Water Waves: P.K. Stansby & D.E. LaurenceDocument32 pagesJHU-SPH Modeling of Water Waves: P.K. Stansby & D.E. LaurenceKhasha NmjlNo ratings yet
- Presentation Leandra CompressedDocument41 pagesPresentation Leandra CompressedLeandra AbreuNo ratings yet
- Resolvent-Based Modelling of Streaky Structures in Turbulent Pipe FlowDocument41 pagesResolvent-Based Modelling of Streaky Structures in Turbulent Pipe FlowLeandra AbreuNo ratings yet
- MECH3780 Fluid Mechanics 2 and CFDDocument34 pagesMECH3780 Fluid Mechanics 2 and CFDninibearNo ratings yet
- CFD Lecture 0Document27 pagesCFD Lecture 0Don Poul JoseNo ratings yet
- Cds 13 Instruct 1Document53 pagesCds 13 Instruct 1Francisco NetoNo ratings yet
- VS Lec3 2023Document35 pagesVS Lec3 2023sarasinha2001No ratings yet
- Turbulent Flow Properties and Statistical DescriptionDocument32 pagesTurbulent Flow Properties and Statistical DescriptionAlo3040No ratings yet
- Concepts: Computational Fluid DynamicsDocument17 pagesConcepts: Computational Fluid DynamicsAmmara RaoNo ratings yet
- Turbulence Modeling For BeginnersDocument20 pagesTurbulence Modeling For BeginnersMohammed BaassiriNo ratings yet
- The Kastler-Kalau-Walze Type Theorem For 6-Dimensional Manifolds With BoundaryDocument15 pagesThe Kastler-Kalau-Walze Type Theorem For 6-Dimensional Manifolds With Boundarywalter huNo ratings yet
- Numerische Strömungsmechanik /: Turbulence: Computational Fluid Dynamics (CFD)Document7 pagesNumerische Strömungsmechanik /: Turbulence: Computational Fluid Dynamics (CFD)norbert90No ratings yet
- CFD Theory RANSDocument23 pagesCFD Theory RANSSieben DoppeltNo ratings yet
- CFD TheoryDocument46 pagesCFD Theoryok rightNo ratings yet
- Num Sol of NavierDocument13 pagesNum Sol of NavierhlkatkNo ratings yet
- Fundamental Equations, Concepts and Implementation of Numerical Simulation in Free Surface FlowDocument30 pagesFundamental Equations, Concepts and Implementation of Numerical Simulation in Free Surface FlowChintan Leo PatelNo ratings yet
- AY2010 CE2134 Hydraulics P01 Basic ConceptsDocument39 pagesAY2010 CE2134 Hydraulics P01 Basic ConceptsEmily ShumNo ratings yet
- Studying The Viscous Flow Around A Cylinder Using OpenfoamDocument39 pagesStudying The Viscous Flow Around A Cylinder Using OpenfoamrockyNo ratings yet
- Possibly Exact Solution For The Multicritical Point of Finite-Dimensional Spin GlassesDocument9 pagesPossibly Exact Solution For The Multicritical Point of Finite-Dimensional Spin GlassesbidsitlovNo ratings yet
- Zour 2000Document33 pagesZour 2000Pamela MaldonadoNo ratings yet
- Pete603 10Document21 pagesPete603 10naefmubarakNo ratings yet
- Turbulence Modelling For Rotating FlowsDocument26 pagesTurbulence Modelling For Rotating FlowsAnonymous scnl9rHNo ratings yet
- Chapter 9 Flow Over Immersed Bodies: Basic ConsiderationsDocument37 pagesChapter 9 Flow Over Immersed Bodies: Basic ConsiderationsChandan kumarNo ratings yet
- Lecture 3 DiffusionDocument68 pagesLecture 3 DiffusionAvinash GuptaNo ratings yet
- Dynamics With Infinitely Many Time Derivatives and Rolling TachyonsDocument40 pagesDynamics With Infinitely Many Time Derivatives and Rolling Tachyonsapi-28482101No ratings yet
- 29المحاضرة الحادية عشرDocument47 pages29المحاضرة الحادية عشرشركة الطليعةNo ratings yet
- Lecture 8 Synchronous Machine ModelingDocument40 pagesLecture 8 Synchronous Machine ModelingManuelNo ratings yet
- Chapter Ten Introduction To Computational Fluid DynamicsDocument28 pagesChapter Ten Introduction To Computational Fluid DynamicsMisge ChekoleNo ratings yet
- Dislocation & Grain Boundary Strengthening MechanismsDocument52 pagesDislocation & Grain Boundary Strengthening MechanismsRayanNo ratings yet
- Application of Nems and MemsDocument63 pagesApplication of Nems and MemsAk InventerNo ratings yet
- Spectra and Pseudospectra: The Behavior of Nonnormal Matrices and OperatorsFrom EverandSpectra and Pseudospectra: The Behavior of Nonnormal Matrices and OperatorsNo ratings yet
- Non-Linear Differential Equations: International Series of Monographs in Pure and Applied MathematicsFrom EverandNon-Linear Differential Equations: International Series of Monographs in Pure and Applied MathematicsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lecture # 04 Grid GenerationDocument49 pagesLecture # 04 Grid Generationmaheshj90No ratings yet
- Lecture # 01 Introduction To CFDDocument23 pagesLecture # 01 Introduction To CFDmaheshj90No ratings yet
- Lecture # 03 CFD Techniques and Properties of Numerial SolutDocument18 pagesLecture # 03 CFD Techniques and Properties of Numerial Solutmaheshj90No ratings yet
- Lecture # 02 Goverening Equations and Its DiscritizationDocument55 pagesLecture # 02 Goverening Equations and Its Discritizationmaheshj90No ratings yet
- Aircraft Structures Repair LabDocument16 pagesAircraft Structures Repair Labmaheshj90No ratings yet
- Intro To CFD Course DetailsDocument1 pageIntro To CFD Course Detailsmaheshj90No ratings yet
- Building Materials and Structures - 2/2020Document89 pagesBuilding Materials and Structures - 2/2020MPBGDNo ratings yet
- A 2D Resonant MEMS Scanner With An Ultra-Compact Wedge-Like Multiplied Angle Amplification For Miniature LIDAR ApplicationDocument3 pagesA 2D Resonant MEMS Scanner With An Ultra-Compact Wedge-Like Multiplied Angle Amplification For Miniature LIDAR ApplicationUğur ÇelikNo ratings yet
- Formula Sheet CE340Document5 pagesFormula Sheet CE340bilumumNo ratings yet
- A Predictive Approach To Fitness-For-Service Assessment of Pitting CorrosionDocument9 pagesA Predictive Approach To Fitness-For-Service Assessment of Pitting CorrosionMaría Vaquero TxapartegiNo ratings yet
- Simplify BOG Recondenser Design and Operation-Part 2: S. P. B. Lemmers, Vopak LNG Holding BV, Rotterdam, The NetherlandsDocument18 pagesSimplify BOG Recondenser Design and Operation-Part 2: S. P. B. Lemmers, Vopak LNG Holding BV, Rotterdam, The NetherlandsmkapkrNo ratings yet
- NEET Test 1 Physics QuestionsDocument48 pagesNEET Test 1 Physics QuestionsBhabesh Mishra100% (1)
- Laser Telemetric SystemDocument2 pagesLaser Telemetric Systemdellibabu509No ratings yet
- NMR Spectroscopy Daily AssignmentDocument1 pageNMR Spectroscopy Daily AssignmentSandipan SahaNo ratings yet
- Simple distillation model analysisDocument9 pagesSimple distillation model analysisSheryll de GuzmanNo ratings yet
- Module 17 Cat A (Jan 18)Document2 pagesModule 17 Cat A (Jan 18)Shaheed ChirayinkeezhuNo ratings yet
- Anti Reflective Coating PhotoresistDocument7 pagesAnti Reflective Coating PhotoresistsaipramodNo ratings yet
- ShearDocument5 pagesShearChetan B ArkasaliNo ratings yet
- 2Document13 pages2VNSAramakiNo ratings yet
- IAL - Chemistry - SB2 - Mark Scheme - T18Document2 pagesIAL - Chemistry - SB2 - Mark Scheme - T18salmaNo ratings yet
- 1.solid StateDocument4 pages1.solid StateChemGuru 4 U0% (1)
- Calculated installed flux and lighting layoutDocument4 pagesCalculated installed flux and lighting layoutdarshaniNo ratings yet
- Food PolymersDocument8 pagesFood PolymersfitsnjNo ratings yet
- Masterflow: Cementitious High Strength Non-Shrink Precision GroutDocument3 pagesMasterflow: Cementitious High Strength Non-Shrink Precision GroutAydın VarolNo ratings yet
- Li Et Al 2006Document8 pagesLi Et Al 2006Ishu NuwaNo ratings yet
- June 2018 MS - Paper 1 OCR (A) Chemistry AS-LevelDocument18 pagesJune 2018 MS - Paper 1 OCR (A) Chemistry AS-LevelRunNo ratings yet
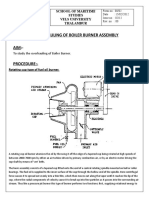
- Overhauling of Boiler Burner AssemblyDocument4 pagesOverhauling of Boiler Burner AssemblyAayush AgrawalNo ratings yet
- Hydraulics energy loss formulaDocument4 pagesHydraulics energy loss formulaAatifNo ratings yet
- Chapter 24: Torsional Vibrations: (A) Shaft of Varying Diameters. (B) Torsionally Equivalent ShaftDocument8 pagesChapter 24: Torsional Vibrations: (A) Shaft of Varying Diameters. (B) Torsionally Equivalent ShaftNazmus Sakib100% (1)
- UNI TEMP Product Info - v1 enDocument7 pagesUNI TEMP Product Info - v1 enSloba H TD-VR-BG-MOSNo ratings yet