You might also like
- Electrical Systems in Power Plants - An OverviewDocument20 pagesElectrical Systems in Power Plants - An OverviewSomnath DasNo ratings yet
- IEEE Insulation Resistance GetPDFDocument8 pagesIEEE Insulation Resistance GetPDFMohamed SalahNo ratings yet
- CT Burden Chart - Flex-Core®Document3 pagesCT Burden Chart - Flex-Core®markigldmm918No ratings yet
- GCB STRDocument7 pagesGCB STRksmuralidharanNo ratings yet
- Dokumen - Tips - Numerical Rho 3 Motor Protection Relay Easun R Current TransformerDocument4 pagesDokumen - Tips - Numerical Rho 3 Motor Protection Relay Easun R Current TransformerPAWAN RAJPUTNo ratings yet
- Document 0Document73 pagesDocument 0prafulNo ratings yet
- Fcma FaqDocument2 pagesFcma FaqSusovan ParuiNo ratings yet
- Cigre Paper On CT FailureDocument6 pagesCigre Paper On CT Failureahmadshoeb19No ratings yet
- Introduction to Machine Protection FunctionsDocument14 pagesIntroduction to Machine Protection FunctionsAbdelsalam ElhaffarNo ratings yet
- Electrical Engineering Interview Guide BookDocument8 pagesElectrical Engineering Interview Guide BookshubhampattiNo ratings yet
- Vertical vs Horizontal Transmission Tower DesignDocument7 pagesVertical vs Horizontal Transmission Tower DesignSantoshNo ratings yet
- Operation, Erection & Maintenance For Power TrafoDocument50 pagesOperation, Erection & Maintenance For Power TrafoJagdeep KumarNo ratings yet
- 62 Low Voltage TransformersDocument36 pages62 Low Voltage TransformersBob Mitzel NavarreteNo ratings yet
- Loading Capability Diagram of Synchronous GeneratorDocument18 pagesLoading Capability Diagram of Synchronous GeneratorMUHAMMAD EHSANNo ratings yet
- CM OLTC Operating Instruction-HM0.460.301Document45 pagesCM OLTC Operating Instruction-HM0.460.301zakirul islamNo ratings yet
- Deep Bar Vis-À-Vis Double Cage Rotor Design For Large MV MotorsDocument2 pagesDeep Bar Vis-À-Vis Double Cage Rotor Design For Large MV MotorsSUBRATA BISWASNo ratings yet
- Induction Generator Starting MethodsDocument5 pagesInduction Generator Starting MethodsChathuranga NagasingheNo ratings yet
- Transformer BhelDocument17 pagesTransformer BhelAayushiNo ratings yet
- Condition Monitoring of Transformers SAILDocument17 pagesCondition Monitoring of Transformers SAILavadiraja100% (1)
- IEEE Recommended Practice For Exc. Sys Models 5Document3 pagesIEEE Recommended Practice For Exc. Sys Models 5Emmanuel ZamoranoNo ratings yet
- Alternator TestingDocument40 pagesAlternator TestingAmit BiswasNo ratings yet
- E02C3112E (Power Socket Terminal Direction and Fixing Methode)Document6 pagesE02C3112E (Power Socket Terminal Direction and Fixing Methode)Heru AwanzNo ratings yet
- Electrical Safety and Protection of Ehv Substation Including The Effects of Power System TransientsDocument62 pagesElectrical Safety and Protection of Ehv Substation Including The Effects of Power System TransientsMuhammad Asif IqbalNo ratings yet
- O&m - Manual - 220V - 187 Ah Plante Battery PDFDocument16 pagesO&m - Manual - 220V - 187 Ah Plante Battery PDFrukmagoud100% (1)
- Why Does My Open Delta Connected Phasor Diagram Look WeirdDocument7 pagesWhy Does My Open Delta Connected Phasor Diagram Look WeirdMarcus SunNo ratings yet
- Why We Need Power Supplies and Batteries for Telecom EquipmentDocument18 pagesWhy We Need Power Supplies and Batteries for Telecom Equipmentsamad_omidvar629250% (2)
- 7SJ61 As High Impedance RelayDocument36 pages7SJ61 As High Impedance Relayzarun1No ratings yet
- Development of Grid Code For Wind Power Generation in India PowerpointDocument37 pagesDevelopment of Grid Code For Wind Power Generation in India PowerpointgopiNo ratings yet
- Neutral Displacement Relay PDFDocument4 pagesNeutral Displacement Relay PDFjoydeep_d3232No ratings yet
- DC Sytem 1Document39 pagesDC Sytem 1RAFEEQUENo ratings yet
- Breaker FailureDocument18 pagesBreaker FailureThangarajan NagarajanNo ratings yet
- Notice For 2nd PSCT TrainingDocument5 pagesNotice For 2nd PSCT Trainings_banerjeeNo ratings yet
- Gen ProtDocument41 pagesGen Protmithun46No ratings yet
- Motor Starting CasestudyDocument2 pagesMotor Starting Casestudykajale_shrikant2325No ratings yet
- Bus Bar Protection Gyanendra Sharma NPTI DelhiDocument39 pagesBus Bar Protection Gyanendra Sharma NPTI DelhiNPTINo ratings yet
- Varun Singh - (2006-2010) .EE... BHEL HaridwarDocument77 pagesVarun Singh - (2006-2010) .EE... BHEL Haridwarvaruns1nghNo ratings yet
- Lightening Arrester 500kVTest Report EnglishDocument20 pagesLightening Arrester 500kVTest Report Englishashwani2101No ratings yet
- 245 KV Sf6 Circuit BreakerDocument7 pages245 KV Sf6 Circuit BreakerAbdul Rahman AmarkhailNo ratings yet
- Expt 3 - EEM - Dielectric Strength of Liquid Insulating MaterialDocument6 pagesExpt 3 - EEM - Dielectric Strength of Liquid Insulating MaterialAvaniPujaraNo ratings yet
- Reduce Power Losses and Improve Power FactorDocument14 pagesReduce Power Losses and Improve Power FactorAdeel ZafarNo ratings yet
- 20 - Current Transformer (Mag Electric) PDFDocument5 pages20 - Current Transformer (Mag Electric) PDFsaina124796010No ratings yet
- Stator Winding Induction Motor in The EMTPDocument8 pagesStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNo ratings yet
- GTP Ykp PDFDocument45 pagesGTP Ykp PDFSwarup NayakNo ratings yet
- Case Study of Load Balancing and Relay Coordination of 132KV Transmission GridDocument6 pagesCase Study of Load Balancing and Relay Coordination of 132KV Transmission GridsivaNo ratings yet
- FM Spae01 en BDocument12 pagesFM Spae01 en BSudhakar YsNo ratings yet
- Cost-Efficient Solution for Power DistributionDocument8 pagesCost-Efficient Solution for Power DistributionaayushNo ratings yet
- Single Line To Ground FaultDocument12 pagesSingle Line To Ground Faultluhusapa-1No ratings yet
- 1986-0040-EL-SPE01-0001 RA Specification For Induction MotorsDocument14 pages1986-0040-EL-SPE01-0001 RA Specification For Induction MotorsjmohammadrezaNo ratings yet
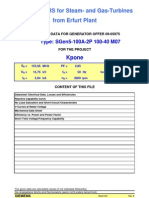
- Electrical and mechanical data for steam turbine generatorDocument8 pagesElectrical and mechanical data for steam turbine generatorBaidyanath BanerjeeNo ratings yet
- Dga 900 A4Document2 pagesDga 900 A4LaurentiuNo ratings yet
- Circuit Breaker Duty CycleDocument2 pagesCircuit Breaker Duty CycleRavishankar.AzadNo ratings yet
- VSC Course Lecture2Document27 pagesVSC Course Lecture2eng7senNo ratings yet
- DCM-Physical Station ServiceDocument22 pagesDCM-Physical Station ServicekcirrenwodNo ratings yet
- Types and Applications of Overcurrent Relay (Part 1) - EEPDocument12 pagesTypes and Applications of Overcurrent Relay (Part 1) - EEPNeelakandan MasilamaniNo ratings yet
- Fast Bus Transfer Systems: A System Solution Approach: Aartech Solonics LTD., Bhopal, IndiaDocument38 pagesFast Bus Transfer Systems: A System Solution Approach: Aartech Solonics LTD., Bhopal, IndiaDurga PrasadNo ratings yet
- CBIP Limit For TandeltaDocument1 pageCBIP Limit For TandeltaMEPL VadodaraNo ratings yet
- Thermal Power Plant Lighting Design GuideDocument56 pagesThermal Power Plant Lighting Design GuideSwagat PradhanNo ratings yet
- Protection of GeneratorDocument60 pagesProtection of GeneratorIsradani MjNo ratings yet
- Commissioning of DAVRDocument70 pagesCommissioning of DAVRPMG Bhuswal Project100% (1)
- G-17 Silver Plaza, Tagor Road, Nr. Bhaktinagar Railway Station Rajkot Gujarat 360006Document4 pagesG-17 Silver Plaza, Tagor Road, Nr. Bhaktinagar Railway Station Rajkot Gujarat 360006Bhavik PrajapatiNo ratings yet
- Annual Rate Contract For The Supply of Electrical Items at IIM IndoreDocument22 pagesAnnual Rate Contract For The Supply of Electrical Items at IIM IndoreBhavik PrajapatiNo ratings yet
- REC DrawingsDocument178 pagesREC DrawingsNagesh Rao98% (45)
- Profily Finskych FiremDocument16 pagesProfily Finskych FiremJoenet DarmawanNo ratings yet
- Lesson Planning FormatDocument3 pagesLesson Planning FormatBhavik PrajapatiNo ratings yet
- LeDocument1 pageLeBhavik PrajapatiNo ratings yet
- Sustainability 08 00013Document13 pagesSustainability 08 00013FredNo ratings yet
- THALETEC 2016 wall calendar and leadership changesDocument9 pagesTHALETEC 2016 wall calendar and leadership changesBhavik PrajapatiNo ratings yet
- Chemical Earthing PDFDocument2 pagesChemical Earthing PDFBhavik PrajapatiNo ratings yet
- Step by Step in DIALux With OSRAM LEDsDocument26 pagesStep by Step in DIALux With OSRAM LEDsTommyc1024No ratings yet
- Iecex TCD 02 Scheme Ed 7.0Document103 pagesIecex TCD 02 Scheme Ed 7.0Bhavik PrajapatiNo ratings yet
- Iecex TCD 02 Scheme Ed 7.0Document103 pagesIecex TCD 02 Scheme Ed 7.0Bhavik PrajapatiNo ratings yet
- Arrester Book Ed 3 enDocument128 pagesArrester Book Ed 3 enNilan Suranga Karavita VidanelageNo ratings yet
- Energies 06 05357 PDFDocument25 pagesEnergies 06 05357 PDFBhavik PrajapatiNo ratings yet
- Motor StartingDocument23 pagesMotor StartingBhavik PrajapatiNo ratings yet
- ShortDocument7 pagesShortBhavik PrajapatiNo ratings yet
- Ieee 14 Bus Technical NoteDocument6 pagesIeee 14 Bus Technical NoteStefania OliveiraNo ratings yet
- Aluminium Busbar Sizing Software OutputDocument3 pagesAluminium Busbar Sizing Software Outputkapil100% (4)
- Symmetrical ComponentsDocument2 pagesSymmetrical ComponentsHamayoun Murtaza100% (1)
- Earthing CalculationDocument14 pagesEarthing CalculationNatarajan Ramakrishnan100% (18)
- Arrester Book Ed 3 enDocument128 pagesArrester Book Ed 3 enNilan Suranga Karavita VidanelageNo ratings yet
- Starting Time Calculation For Induction Motor 2332 0796 1000136Document4 pagesStarting Time Calculation For Induction Motor 2332 0796 1000136Bhavik PrajapatiNo ratings yet
- WSU GENTheory 1PageperSlide 160114 PDFDocument247 pagesWSU GENTheory 1PageperSlide 160114 PDFhermawanNo ratings yet
- IEEE 14 bus system momentary and interrupting duty analysisDocument2 pagesIEEE 14 bus system momentary and interrupting duty analysisBhavik PrajapatiNo ratings yet
- Vikram Solar PanelsDocument4 pagesVikram Solar PanelsBhavik PrajapatiNo ratings yet
- ETAP Transient Stability Analysis of IEEE 14-Bus SystemDocument19 pagesETAP Transient Stability Analysis of IEEE 14-Bus SystemBhavik PrajapatiNo ratings yet
- Bim Services BrochureDocument8 pagesBim Services BrochureBhavik PrajapatiNo ratings yet
- Transient Stability 479Document6 pagesTransient Stability 479Armando MaloneNo ratings yet
- OLV1 Load Flow Analysis One-Line DiagramDocument2 pagesOLV1 Load Flow Analysis One-Line DiagramBhavik PrajapatiNo ratings yet
- 04401510Document9 pages04401510Anonymous HyOfbJ6No ratings yet
- Stepper Motor Control Using ArduinoDocument22 pagesStepper Motor Control Using ArduinoNâwãl KîšhôřNo ratings yet
- Speed control of three phase induction motorsDocument26 pagesSpeed control of three phase induction motorsrajasekaranNo ratings yet
- DC Motor Construction and Working PrinciplesDocument13 pagesDC Motor Construction and Working PrinciplesSayali HadapNo ratings yet
- 8085 - Lecture - Stepper Motor Interfacing - Prof. RAMDocument6 pages8085 - Lecture - Stepper Motor Interfacing - Prof. RAMKumar AnjeetNo ratings yet
- Lista de PartesDocument7 pagesLista de PartesMarcelo CobeñaNo ratings yet
- 2332x BibDocument4 pages2332x BibCèsar GarzónNo ratings yet
- uPD79F7027, N0601N: Application NoteDocument29 pagesuPD79F7027, N0601N: Application NoteSajjad HussainNo ratings yet
- Unit IDocument69 pagesUnit IThangam MaheshNo ratings yet
- How To Make Solenoid at Home?: InstructablesDocument4 pagesHow To Make Solenoid at Home?: InstructablesClóvis MorNo ratings yet
- HTB1KrKMHVXXXXaEXXXX PRXFXXXyDocument3 pagesHTB1KrKMHVXXXXaEXXXX PRXFXXXyMashtu94No ratings yet
- Current Transformer Test Report: Cty TNHH MTV CN Chung TínDocument1 pageCurrent Transformer Test Report: Cty TNHH MTV CN Chung TínThức VõNo ratings yet
- 3 Synchronous PDFDocument16 pages3 Synchronous PDFASHOK P R kceNo ratings yet
- Taller de Máquina Asíncrona - Motor de InducciónDocument2 pagesTaller de Máquina Asíncrona - Motor de InduccióndileconNo ratings yet
- Real AutoDocument623 pagesReal AutoMed AliNo ratings yet
- Analysis of Power and Torque For The IPM Motors With High Flux Density in StatorDocument8 pagesAnalysis of Power and Torque For The IPM Motors With High Flux Density in Statorphan hoai nam PhanNo ratings yet
- EE6703-Special Electrical MachinesDocument13 pagesEE6703-Special Electrical MachinesPhantaree JayavelNo ratings yet
- Chapter 3 QuestionsDocument2 pagesChapter 3 QuestionsTinozivasheNo ratings yet
- TRANSFORMERDocument52 pagesTRANSFORMERNaty SeyoumNo ratings yet
- Unit 9 - Week 6: Assignment 6Document15 pagesUnit 9 - Week 6: Assignment 6venkatNo ratings yet
- DC Machine Interpoles ExplainedDocument20 pagesDC Machine Interpoles ExplainedSankha PattanayakNo ratings yet
- K. S. R. College of Engineering, Tiruchengode - 637 215: Internal Assesement Test IiDocument2 pagesK. S. R. College of Engineering, Tiruchengode - 637 215: Internal Assesement Test IiVeeramaniNo ratings yet
- The HyperloopDocument23 pagesThe Hyperloopreenrabi3342No ratings yet
- DC MotorDocument9 pagesDC MotorSayan DeyNo ratings yet
- Unit 3Document16 pagesUnit 3ALFRED AKPONo ratings yet
- DC Armature WindingDocument11 pagesDC Armature Windingmounga moungaNo ratings yet
- EMD Important Questions Unit-III Starting MethodsDocument9 pagesEMD Important Questions Unit-III Starting MethodsJoseph HarindranathNo ratings yet
- 62-005 Ed04-1Document646 pages62-005 Ed04-1Joao Lopes SilvaNo ratings yet
- (4-2) Synchronous GeneratorDocument35 pages(4-2) Synchronous Generatorfarah haniNo ratings yet
- Ki Chankim2009Document4 pagesKi Chankim2009reddy venkata krishnaNo ratings yet
- MA-415 Industrial Drives Lab IndexDocument19 pagesMA-415 Industrial Drives Lab IndexMayankJainNo ratings yet