You might also like
- An Ldmicro Tutorial: Microcontroller Selection and SchematicDocument11 pagesAn Ldmicro Tutorial: Microcontroller Selection and Schematicpreetamdoorgah100% (1)
- An LDmicro TutorialDocument7 pagesAn LDmicro TutorialErick F. Delpretti Z.No ratings yet
- An LDmicro TutorialDocument16 pagesAn LDmicro TutorialJuan Fco Rocha ParedesNo ratings yet
- Cheap Arduino 2 Wire LCD Display - 3guys1laserDocument5 pagesCheap Arduino 2 Wire LCD Display - 3guys1laserDenaiya Watton LeehNo ratings yet
- Log In: Using 74HC595 To Expand Output Pins of A PIC Microcontroller: Assembly CodeDocument8 pagesLog In: Using 74HC595 To Expand Output Pins of A PIC Microcontroller: Assembly CodeSalim BlognetNo ratings yet
- Control RGB LED displays with simple pushbutton effects controllerDocument2 pagesControl RGB LED displays with simple pushbutton effects controllercristian123No ratings yet
- Arduino XY Plot Draw Oscilloscope Christmas Tree PDFDocument7 pagesArduino XY Plot Draw Oscilloscope Christmas Tree PDFFrank GNo ratings yet
- Build Your Home-Made 500Khz Frequency Meter!Document12 pagesBuild Your Home-Made 500Khz Frequency Meter!nagdeep58No ratings yet
- Ladder Logic For PIC and AVRDocument9 pagesLadder Logic For PIC and AVRCarlos Cesar MaiaNo ratings yet
- 1.3inch LCD Module User Manual enDocument15 pages1.3inch LCD Module User Manual enDeddy ChenNo ratings yet
- Arduino Digital Optical Tachometer RPM SensorDocument18 pagesArduino Digital Optical Tachometer RPM SensorJamMnx_No ratings yet
- Lab 4: Motor Control: 1 OverviewDocument7 pagesLab 4: Motor Control: 1 OverviewPaul Emmanuel MarkNo ratings yet
- 8051 Interfacing With Display SevicesDocument5 pages8051 Interfacing With Display Sevicesramjee26100% (1)
- Look Into The Eye From TI' For Precision Light Readings: Column #21, November 1996 by Scott EdwardsDocument10 pagesLook Into The Eye From TI' For Precision Light Readings: Column #21, November 1996 by Scott Edwardslgrome73100% (1)
- Binary Desk Clock: by TaifurDocument13 pagesBinary Desk Clock: by TaifurEngr Walley Erfan KhanNo ratings yet
- An asm Introduction And The Embedded "Hello WorldDocument120 pagesAn asm Introduction And The Embedded "Hello WorldRodrigo Espinoza CorsNo ratings yet
- Functional block diagram of an accelerometer-based tilt sensorDocument7 pagesFunctional block diagram of an accelerometer-based tilt sensorMuhammad Amir SadiqNo ratings yet
- Ym12864p-Dalian Good Display PDFDocument10 pagesYm12864p-Dalian Good Display PDFEvgeniyNo ratings yet
- AT&T Dsp3210Document12 pagesAT&T Dsp3210nguynNo ratings yet
- Read Sensor and Toggle LED with Button InterruptDocument10 pagesRead Sensor and Toggle LED with Button InterruptDerek WangNo ratings yet
- Ladder Logic For PIC and AVRDocument6 pagesLadder Logic For PIC and AVRTomás Totaro100% (1)
- Ir Remote Control - How To Build Your OwnDocument19 pagesIr Remote Control - How To Build Your Owndeltabravo70No ratings yet
- Lab-AR-2-Jueves 24Document11 pagesLab-AR-2-Jueves 24Syd BarrettNo ratings yet
- Home Security System Using Microcontroller 8051: Project Synopsis OnDocument19 pagesHome Security System Using Microcontroller 8051: Project Synopsis OndeepeshNo ratings yet
- Relay Bypass Theory: A Reliable and Long-Lasting True Bypass SystemDocument39 pagesRelay Bypass Theory: A Reliable and Long-Lasting True Bypass Systemnanodocl5099No ratings yet
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- Home Archive Contact Subscribe: Miłosz OrzełDocument9 pagesHome Archive Contact Subscribe: Miłosz Orzełcarlyblack2006No ratings yet
- Scroll Single LCD Line with ArduinoDocument8 pagesScroll Single LCD Line with ArduinofaisalNo ratings yet
- Tim's Blog Light - WS2812 Library V2.0 - Part I: Understanding The WS2812Document15 pagesTim's Blog Light - WS2812 Library V2.0 - Part I: Understanding The WS2812jijoNo ratings yet
- Arduino Tachometer - RPM DisplayDocument10 pagesArduino Tachometer - RPM DisplayDiego Mendoza AncallaNo ratings yet
- Write A Program For Interfacing The 16x2 LCD MODULES AimDocument7 pagesWrite A Program For Interfacing The 16x2 LCD MODULES AimLeelasrikanth TubatiNo ratings yet
- Instructions on modifying the Turnigy/Eurgle/Imax/FlySky 9ch Tx to flash new SoftwareDocument7 pagesInstructions on modifying the Turnigy/Eurgle/Imax/FlySky 9ch Tx to flash new Softwareتيه تاريق مادوNo ratings yet
- CANopen Communication Module Application ManualDocument32 pagesCANopen Communication Module Application ManualOleg MNo ratings yet
- MICROCONTROLLER-BASED CODE LOCKDocument3 pagesMICROCONTROLLER-BASED CODE LOCKKhushi Khanna67% (3)
- Practica - 32 - Using A Real-Time Clock ModuleDocument4 pagesPractica - 32 - Using A Real-Time Clock ModuleDiego Ruben Varela ArriagaNo ratings yet
- KicadDocument87 pagesKicadKiss IstvánNo ratings yet
- LDmicro - Manual InglesDocument17 pagesLDmicro - Manual InglesMoacyr_Jr0% (1)
- How To Extend Arduino PWM OutputsDocument18 pagesHow To Extend Arduino PWM OutputsBobbyNo ratings yet
- Manual Geral ArduinoDocument187 pagesManual Geral ArduinoFabio Brandespim100% (1)
- Automatic Room Light Controller With Bidirectional Visitor - Hackster - IoDocument13 pagesAutomatic Room Light Controller With Bidirectional Visitor - Hackster - Ioinfluemento agborNo ratings yet
- PIC TutorialDocument203 pagesPIC TutorialUnwana James0% (1)
- Real Time Digital Clock ReportDocument14 pagesReal Time Digital Clock ReportNoor AhmedNo ratings yet
- Bascom and AVR, Using An LCD.: Peter Ouwehand'sDocument10 pagesBascom and AVR, Using An LCD.: Peter Ouwehand'sAulia RahmayantiNo ratings yet
- SC4. 8x8 LED Dot Matrix Addon Card For Southern Cross I & IIDocument4 pagesSC4. 8x8 LED Dot Matrix Addon Card For Southern Cross I & IIVDT2420 EmbeddedNo ratings yet
- SC4 8x8 LED DisplayDocument4 pagesSC4 8x8 LED DisplayVDT2420 EmbeddedNo ratings yet
- In Depth LED Blink With NXP LPC17xx - ZembeddedDocument4 pagesIn Depth LED Blink With NXP LPC17xx - Zembeddedandresteve07No ratings yet
- AVR Project - Remote Controlled Fan Regulator.Document23 pagesAVR Project - Remote Controlled Fan Regulator.nadaratNo ratings yet
- Back-to-Back Frame Relay: Get It To Work. Refer ToDocument6 pagesBack-to-Back Frame Relay: Get It To Work. Refer ToSameer Bather SamNo ratings yet
- Sensor Luz Ada FruitDocument13 pagesSensor Luz Ada FruitmaxonetNo ratings yet
- ADC-DAC Tutorial on Spartan 3E BoardDocument6 pagesADC-DAC Tutorial on Spartan 3E BoardNguyễn Hữu DuyNo ratings yet
- SCP 1000Document10 pagesSCP 1000buzzo182No ratings yet
- Led RainbowDocument2 pagesLed Rainbowcristian123No ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Virtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17From EverandVirtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17No ratings yet
- Digital LED Thermometer with Microcontroller AVR ATtiny13From EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Rating: 5 out of 5 stars5/5 (1)
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- Fault Code Bible v1.2Document136 pagesFault Code Bible v1.2sasa6867% (3)
- BREHMER Polygraph 381 1ea3 Web PDFDocument3 pagesBREHMER Polygraph 381 1ea3 Web PDFvanjalujicNo ratings yet
- Galaxy Note 4 - How To Unroot, Unbrick, Flash Stock FirmwareDocument4 pagesGalaxy Note 4 - How To Unroot, Unbrick, Flash Stock FirmwarevanjalujicNo ratings yet
- HOW TO - The And, Or, XOR Logic Operations On CONTACTs Inputs LDmicro - LDmicro Wiki GitHubDocument1 pageHOW TO - The And, Or, XOR Logic Operations On CONTACTs Inputs LDmicro - LDmicro Wiki GitHubvanjalujicNo ratings yet
- Mercedes Benz Fault Code ManualDocument107 pagesMercedes Benz Fault Code ManualAnthony75% (53)
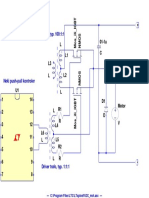
- Strujni Trafo, Typ. 100:1:1: - C:/Program Files/Ltc/Ltspiceiv/Dc - Mot - AscDocument1 pageStrujni Trafo, Typ. 100:1:1: - C:/Program Files/Ltc/Ltspiceiv/Dc - Mot - AscvanjalujicNo ratings yet
- 01 ArdDocument3 pages01 ArdvanjalujicNo ratings yet
- Phaser 8860Document316 pagesPhaser 8860br0nz860No ratings yet
- User Manual1 PDFDocument56 pagesUser Manual1 PDFAngsNo ratings yet
- DS200 - Katalog Motora Roland PDFDocument20 pagesDS200 - Katalog Motora Roland PDFvanjalujicNo ratings yet
- Upustvo Za FLASh 1212 VcdsDocument8 pagesUpustvo Za FLASh 1212 VcdsvanjalujicNo ratings yet
- HemikalijeDocument18 pagesHemikalijevanjalujicNo ratings yet
- Bizhub C450 Theory OperationDocument292 pagesBizhub C450 Theory OperationBurz OctavianNo ratings yet
- Klima Golf 4 SemaDocument8 pagesKlima Golf 4 SemavanjalujicNo ratings yet
- How to Change a KnifeDocument21 pagesHow to Change a KnifevanjalujicNo ratings yet
- Service Instructions: PERFECTA 76 / 92 / 115 / 132 / 168 Uc / TVDocument32 pagesService Instructions: PERFECTA 76 / 92 / 115 / 132 / 168 Uc / TVvanjalujicNo ratings yet
- C:/Program Files/Ltc/Ltspiceiv/Motordc - Asc - : Grec 600V/25A Na Hladnjak Igbt Min 600V 20A Na HladnjakDocument1 pageC:/Program Files/Ltc/Ltspiceiv/Motordc - Asc - : Grec 600V/25A Na Hladnjak Igbt Min 600V 20A Na HladnjakvanjalujicNo ratings yet
- FC3 Counter DemoDocument3 pagesFC3 Counter DemovanjalujicNo ratings yet
- Duploflex FolDocument2 pagesDuploflex FolvanjalujicNo ratings yet
- DSO150 HowToUpgradeFirmwareDocument4 pagesDSO150 HowToUpgradeFirmwarevanjalujicNo ratings yet
- Generate Arduino C Code from Ladder LogicDocument2 pagesGenerate Arduino C Code from Ladder LogicvanjalujicNo ratings yet
- 4110-4590cp Ug PDFDocument520 pages4110-4590cp Ug PDFjanam_sweetNo ratings yet
- Ce Nov Nik VanjaDocument4 pagesCe Nov Nik VanjavanjalujicNo ratings yet
- LG 42LM3450 42LM345S 42LM345T Za LD21B PDFDocument55 pagesLG 42LM3450 42LM345S 42LM345T Za LD21B PDFvanjalujic100% (1)
- PI of Toner Cartridge-Vanja Lujic-Bosnia and Herzegovina-20170820Document1 pagePI of Toner Cartridge-Vanja Lujic-Bosnia and Herzegovina-20170820vanjalujicNo ratings yet
- fxtrn0573023 BDocument143 pagesfxtrn0573023 BvanjalujicNo ratings yet
- Active and Passive Voice of Future Continuous Tense - Passive Voice Tips-1Document5 pagesActive and Passive Voice of Future Continuous Tense - Passive Voice Tips-1Kamal deep singh SinghNo ratings yet
- Desert Power India 2050Document231 pagesDesert Power India 2050suraj jhaNo ratings yet
- Problems of Teaching English As A Foreign Language in YemenDocument13 pagesProblems of Teaching English As A Foreign Language in YemenSabriThabetNo ratings yet
- Cianura Pentru Un Suras de Rodica OjogDocument1 pageCianura Pentru Un Suras de Rodica OjogMaier MariaNo ratings yet
- Condy LatorDocument11 pagesCondy LatorrekabiNo ratings yet
- ASTM D256-10 - Standard Test Methods For Determining The Izod Pendulum Impact Resistance of PlasticsDocument20 pagesASTM D256-10 - Standard Test Methods For Determining The Izod Pendulum Impact Resistance of PlasticsEng. Emílio DechenNo ratings yet
- Single-Phase Induction Generators PDFDocument11 pagesSingle-Phase Induction Generators PDFalokinxx100% (1)
- Urodynamics Griffiths ICS 2014Document198 pagesUrodynamics Griffiths ICS 2014nadalNo ratings yet
- The Sound Collector - The Prepared Piano of John CageDocument12 pagesThe Sound Collector - The Prepared Piano of John CageLuigie VazquezNo ratings yet
- Lesson 2 Mathematics Curriculum in The Intermediate GradesDocument15 pagesLesson 2 Mathematics Curriculum in The Intermediate GradesRose Angel Manaog100% (1)
- Artificial IseminationDocument6 pagesArtificial IseminationHafiz Muhammad Zain-Ul AbedinNo ratings yet
- Translation EquivalenceDocument6 pagesTranslation EquivalenceJamal Anwar TahaNo ratings yet
- Unit 1 Writing. Exercise 1Document316 pagesUnit 1 Writing. Exercise 1Hoài Thương NguyễnNo ratings yet
- Major Bank Performance IndicatorsDocument35 pagesMajor Bank Performance IndicatorsAshish MehraNo ratings yet
- Imaging Approach in Acute Abdomen: DR - Parvathy S NairDocument44 pagesImaging Approach in Acute Abdomen: DR - Parvathy S Nairabidin9No ratings yet
- The Teacher and The Community School Culture and Organizational LeadershipDocument10 pagesThe Teacher and The Community School Culture and Organizational LeadershipChefandrew FranciaNo ratings yet
- PA Inspection Guidelines For Single Site Acceptance: 1 © Nokia Siemens NetworksDocument18 pagesPA Inspection Guidelines For Single Site Acceptance: 1 © Nokia Siemens NetworksDenny WijayaNo ratings yet
- Chicago Electric Inverter Plasma Cutter - 35A Model 45949Document12 pagesChicago Electric Inverter Plasma Cutter - 35A Model 45949trollforgeNo ratings yet
- Post Marketing SurveillanceDocument19 pagesPost Marketing SurveillanceRamanjeet SinghNo ratings yet
- Irctc Tour May 2023Document6 pagesIrctc Tour May 2023Mysa ChakrapaniNo ratings yet
- SEMICONDUCTORS AssignmentDocument8 pagesSEMICONDUCTORS AssignmentMaryam MuneebNo ratings yet
- Investigatory Project Pesticide From RadishDocument4 pagesInvestigatory Project Pesticide From Radishmax314100% (1)
- ROPE TENSIONER Product-Catalog-2019Document178 pagesROPE TENSIONER Product-Catalog-2019jeedanNo ratings yet
- 5505 SW 138th CT, Miami, FL 33175 ZillowDocument1 page5505 SW 138th CT, Miami, FL 33175 Zillowlisalinda29398378No ratings yet
- Budget ControlDocument7 pagesBudget ControlArnel CopinaNo ratings yet
- Capacity PlanningDocument19 pagesCapacity PlanningfarjadarshadNo ratings yet
- TLE8 Q4 Week 8 As Food ProcessingDocument4 pagesTLE8 Q4 Week 8 As Food ProcessingROSELLE CASELANo ratings yet
- Rheology of Polymer BlendsDocument10 pagesRheology of Polymer Blendsalireza198No ratings yet
- Binomial ExpansionDocument13 pagesBinomial Expansion3616609404eNo ratings yet
- Sekolah Menengah Kebangsaan Ss17 JALAN SS17/1, Subang Jaya English Scheme of Work Form 3Document11 pagesSekolah Menengah Kebangsaan Ss17 JALAN SS17/1, Subang Jaya English Scheme of Work Form 3Rohana YahyaNo ratings yet