You might also like
- Fundamentals of Transformer ProtectionDocument37 pagesFundamentals of Transformer ProtectionVikas Oza100% (1)
- Broken Conductor Protection PDFDocument4 pagesBroken Conductor Protection PDFRandhir KumarNo ratings yet
- VTU NOTES Load Flow AnalysisDocument33 pagesVTU NOTES Load Flow AnalysisRakshitha VNo ratings yet
- Fault CalculationsDocument24 pagesFault CalculationsRomel Cabrera II100% (1)
- 400kv Transmission Lines ProtectionDocument17 pages400kv Transmission Lines ProtectionbillymcrealNo ratings yet
- Vector Group of Transformer - Electrical Notes & ArticlesDocument28 pagesVector Group of Transformer - Electrical Notes & ArticlesRamanjaneyulu KNo ratings yet
- GE Multilin Relay Selection GuideDocument40 pagesGE Multilin Relay Selection GuideSaravanan Natarajan100% (1)
- LINEREV ProtectionDocument92 pagesLINEREV Protectionhafiz_hazreen100% (2)
- Case Studies On Paralleling of TransformersDocument7 pagesCase Studies On Paralleling of Transformersmuaz_aminu1422No ratings yet
- Advantages of Tertiary Windings in TransformersDocument3 pagesAdvantages of Tertiary Windings in Transformersమాచర్ల రవీంద్ర నాథ్No ratings yet
- Exercise - Setting An SEL-751A To Replace An Existing Electromechanical RelayDocument8 pagesExercise - Setting An SEL-751A To Replace An Existing Electromechanical RelayDavidNo ratings yet
- Study of Short Circuit Faults-Case Study Sudanese National GridDocument75 pagesStudy of Short Circuit Faults-Case Study Sudanese National GridYousra Daya0% (1)
- Understanding Transformer Impedance (ZDocument2 pagesUnderstanding Transformer Impedance (ZAnonymous vcadX45TD7No ratings yet
- Ladder DiagramDocument17 pagesLadder DiagramItsMeRyanCNo ratings yet
- Parallel Operation of Transformers Guide|Conditions for SuccessDocument6 pagesParallel Operation of Transformers Guide|Conditions for SuccessaaaaNo ratings yet
- Fundamentals of Power System ProtectionDocument22 pagesFundamentals of Power System ProtectionKGNo ratings yet
- Back Up Impedance ProtectionDocument3 pagesBack Up Impedance ProtectionNeelakandan MasilamaniNo ratings yet
- Zero Sequence ImpedanceDocument11 pagesZero Sequence ImpedanceBharat100% (1)
- Generator and distribution transformer connections: Star and delta configurationsDocument34 pagesGenerator and distribution transformer connections: Star and delta configurationsAnonymous ufMAGXcskMNo ratings yet
- Secondary Injection Testing For Transformer Differential PDocument25 pagesSecondary Injection Testing For Transformer Differential PAdetunji TaiwoNo ratings yet
- Testing Directional Overcurrent ProtectionDocument2 pagesTesting Directional Overcurrent ProtectionZokiNo ratings yet
- Paper On Automatic Reclosing Transmission Lines Applications and Its ConsiderationsDocument8 pagesPaper On Automatic Reclosing Transmission Lines Applications and Its ConsiderationsGagan GillNo ratings yet
- MHOA04 MHOB04 MHOC04 SalesenDocument16 pagesMHOA04 MHOB04 MHOC04 Salesendreamsky702243No ratings yet
- Radio and TV Antenna Protection SystemDocument42 pagesRadio and TV Antenna Protection SystemBhanu Prakash100% (1)
- Contingency Analysis of Power Systems PDFDocument4 pagesContingency Analysis of Power Systems PDFbenitogaldos19gmail.comNo ratings yet
- Lab 1 Introduction To Power System ProtectionDocument11 pagesLab 1 Introduction To Power System Protectionsaud aliNo ratings yet
- Relay CodingDocument7 pagesRelay CodingEr Anoop GuptaNo ratings yet
- Busbar ProtectionDocument10 pagesBusbar ProtectionMohd Taufiq IshakNo ratings yet
- Voltage Disturbance Detection Using Broken Delta ConnectionDocument8 pagesVoltage Disturbance Detection Using Broken Delta ConnectionsrimantaNo ratings yet
- High Set 1 (Is-HS1) & High Set 2 (Is-HS2) and Its Calculation - Electrical ConceptsDocument5 pagesHigh Set 1 (Is-HS1) & High Set 2 (Is-HS2) and Its Calculation - Electrical ConceptsAdam AbrahamNo ratings yet
- Travelling Wave Fault Location in HV LinesDocument8 pagesTravelling Wave Fault Location in HV LinesSuginoMarwotoNo ratings yet
- Comparing Power Transformer Turn-to-Turn FaultsDocument9 pagesComparing Power Transformer Turn-to-Turn Faultsskylimit.skylimitNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Advanced Transformer ParallelingDocument6 pagesAdvanced Transformer ParallelingnicholasleeNo ratings yet
- Restricted Earth Fault Protection of Transformer - REF ProtectionDocument4 pagesRestricted Earth Fault Protection of Transformer - REF Protectionpoornak47No ratings yet
- OLTC - Circulating CurrentDocument16 pagesOLTC - Circulating CurrentAsif MominNo ratings yet
- Switchyard Basics and ComponentsDocument33 pagesSwitchyard Basics and ComponentsAafaque QureshiNo ratings yet
- REF PROTECTION OF Autotransformer PDFDocument14 pagesREF PROTECTION OF Autotransformer PDFNeelakandan MasilamaniNo ratings yet
- Effect of Fault Resistance On Behavior of Distance ProtectionDocument6 pagesEffect of Fault Resistance On Behavior of Distance ProtectionShafqat HussnainNo ratings yet
- Types and Applications of Overcurrent RelayDocument10 pagesTypes and Applications of Overcurrent Relayhasbi fadliNo ratings yet
- Protection Systems and Devices (Protective Relays) : Dr. Ahmed SaberDocument31 pagesProtection Systems and Devices (Protective Relays) : Dr. Ahmed SaberMichael AshrafNo ratings yet
- Future Substation TechnologiesDocument22 pagesFuture Substation TechnologiesDevidas KulkarniNo ratings yet
- CMC-Testing of Restricted Earth Fault Protection With OMICRON Advanced DifferentialDocument12 pagesCMC-Testing of Restricted Earth Fault Protection With OMICRON Advanced Differentialskylimit.skylimit100% (4)
- Pages From 241-1990 Gray Book Power Systems Commercial BuildingsDocument1 pagePages From 241-1990 Gray Book Power Systems Commercial BuildingsArnel Pascual LaquindanumNo ratings yet
- Air Load Break SwitchDocument30 pagesAir Load Break SwitchraffyjaneNo ratings yet
- P10Document16 pagesP10Lynskey1973100% (1)
- Busbar Differential ProtectionDocument19 pagesBusbar Differential ProtectionVijay KumarNo ratings yet
- Zero Sequence CompensationDocument8 pagesZero Sequence Compensationlapet busukNo ratings yet
- Capacitance Voltage Transforme1Document4 pagesCapacitance Voltage Transforme1ayushNo ratings yet
- Course PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsDocument41 pagesCourse PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsMahmoud Al-QudahNo ratings yet
- Transmission Line ProtectionDocument31 pagesTransmission Line ProtectionJai Gupta100% (1)
- Transformer Protection MethodsDocument63 pagesTransformer Protection MethodsAscerZayan100% (1)
- Plan to Study Electrical Power Systems in China (39Document2 pagesPlan to Study Electrical Power Systems in China (39valasai60374% (42)
- LVS ResumeDocument4 pagesLVS ResumeAsan IbrahimNo ratings yet
- ABB REM Relay Unit Software Manual CAP 505Document102 pagesABB REM Relay Unit Software Manual CAP 505mitch1973100% (1)
- Line Current Differential Testing-A Practical ApproachDocument10 pagesLine Current Differential Testing-A Practical ApproachmentongNo ratings yet
- R.C.dorf - The Electric Power Engineering Handbook - IndexDocument16 pagesR.C.dorf - The Electric Power Engineering Handbook - IndexHowk Rios0% (1)
- Parallel Operation of TransformersDocument10 pagesParallel Operation of TransformersMMK29100% (1)
- Parallel Con - For TransformersDocument6 pagesParallel Con - For Transformersmahmoud shalabiNo ratings yet
- Calculation - Method - ULF Unbalanced Load Flow ETAP PDFDocument8 pagesCalculation - Method - ULF Unbalanced Load Flow ETAP PDFZulqibalNo ratings yet
- Problems of Circuit InterruptionDocument20 pagesProblems of Circuit Interruptioneeng812450% (2)
- Differential Protection Explained - Principles, Design & ConsiderationsDocument3 pagesDifferential Protection Explained - Principles, Design & Considerationsjagadeesh_kumar_20No ratings yet
- Ferro Resonance in Power SystemDocument3 pagesFerro Resonance in Power SystemYash BhattiproluNo ratings yet
- External and Internal Faults in Power TransformerDocument3 pagesExternal and Internal Faults in Power TransformerkyahuaNo ratings yet
- Lowering The Limits For Earth-Fault Detection: Abstract-Current Flowing To Earth Has Only TwoDocument5 pagesLowering The Limits For Earth-Fault Detection: Abstract-Current Flowing To Earth Has Only TwoDeepak GehlotNo ratings yet
- EE35T - Transformer Differential ProtectionDocument4 pagesEE35T - Transformer Differential ProtectionTanveer Ul HaqNo ratings yet
- Auto RecloserDocument16 pagesAuto RecloserMohammedHaythamNo ratings yet
- 12 - Transformer ProtectionDocument40 pages12 - Transformer ProtectionSarthak Vats100% (2)
- Analysis of Nigerian Grid Using MATLABDocument8 pagesAnalysis of Nigerian Grid Using MATLABOgunranti RasaqNo ratings yet
- Setting The Resistive Reach of Quadrilateral Characteristics o F Distance RelaysDocument5 pagesSetting The Resistive Reach of Quadrilateral Characteristics o F Distance RelaysSalvador ArcosNo ratings yet
- Easun Reyrolle: Figure 11. Star Connected Bank, Two Limbs Per PhaseDocument20 pagesEasun Reyrolle: Figure 11. Star Connected Bank, Two Limbs Per PhaseE.AvinashNo ratings yet
- 6615 LowSecondHarmonic BK 20140210 WebDocument20 pages6615 LowSecondHarmonic BK 20140210 Webskylimit.skylimitNo ratings yet
- 6574 ChargingCurrent DF 20120914 Web2 PDFDocument18 pages6574 ChargingCurrent DF 20120914 Web2 PDFbrianNo ratings yet
- Requirements: For OMICRON Test Universe 3.20Document5 pagesRequirements: For OMICRON Test Universe 3.20Khalfan AlhashmiNo ratings yet
- Datasheet of 5VT1 CableDocument2 pagesDatasheet of 5VT1 Cableskylimit.skylimitNo ratings yet
- Fiber Optic Cables HelucomDocument158 pagesFiber Optic Cables Helucomskylimit.skylimitNo ratings yet
- Settings Considerations For Distance Elements in Line Protection ApplicationsDocument25 pagesSettings Considerations For Distance Elements in Line Protection Applicationsskylimit.skylimitNo ratings yet
- Mutual Coupling Compensation Techniques Used For Distance Protection of Parallel LinesDocument15 pagesMutual Coupling Compensation Techniques Used For Distance Protection of Parallel Linesskylimit.skylimitNo ratings yet
- Cable Sheath Bonding Application Guide Companion PDFDocument45 pagesCable Sheath Bonding Application Guide Companion PDFskylimit.skylimitNo ratings yet
- Mi454an MISDocument3 pagesMi454an MISskylimit.skylimitNo ratings yet
- Energies 09 01022Document30 pagesEnergies 09 01022skylimit.skylimitNo ratings yet
- Introduction to Symmetrical Components and Fault AnalysisDocument66 pagesIntroduction to Symmetrical Components and Fault AnalysisbajricaNo ratings yet
- Cable Sheath Bonding Application Guide Companion PDFDocument45 pagesCable Sheath Bonding Application Guide Companion PDFskylimit.skylimitNo ratings yet
- IEDScout Examples ENUDocument22 pagesIEDScout Examples ENUskylimit.skylimitNo ratings yet
- 2015 02 PotM Mutual Coupling Test Analysis Protection Behaviour ENU PDFDocument10 pages2015 02 PotM Mutual Coupling Test Analysis Protection Behaviour ENU PDFskylimit.skylimitNo ratings yet
- Design Principles of High Performance Numerical Busbar Differential ProtectionDocument7 pagesDesign Principles of High Performance Numerical Busbar Differential Protectionskylimit.skylimitNo ratings yet
- Changes WinREG V3.8.18-V3.9.6 20130125Document13 pagesChanges WinREG V3.8.18-V3.9.6 20130125skylimit.skylimitNo ratings yet
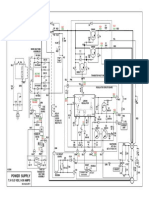
- Voltage and current readings from a power supply circuitDocument1 pageVoltage and current readings from a power supply circuitskylimit.skylimit100% (1)
- Software Winreg 3.9: We Take Care of ItDocument5 pagesSoftware Winreg 3.9: We Take Care of ItMarkoNo ratings yet
- BackgroundDocument56 pagesBackgroundskylimit.skylimitNo ratings yet
- Iec61850 Startup A3 enDocument66 pagesIec61850 Startup A3 enGalingasis Juozelis100% (1)
- Power Supply ShemeDocument1 pagePower Supply Shemeskylimit.skylimitNo ratings yet
- Manual - 1U - MICRO - Compact - PSX160xxx1F-x00 v2.4 PDFDocument30 pagesManual - 1U - MICRO - Compact - PSX160xxx1F-x00 v2.4 PDFAlex Enrique Chavez GonzalezNo ratings yet
- Load Frequency Control in Three Area Power System Using Fuzzy Logic ControllerDocument6 pagesLoad Frequency Control in Three Area Power System Using Fuzzy Logic ControllerEditor IJTSRDNo ratings yet
- Psa ModelDocument2 pagesPsa ModelSyed MeerNo ratings yet
- DynamicDemand As On IEEE Site 1Document9 pagesDynamicDemand As On IEEE Site 1AlejandroHerreraGurideChileNo ratings yet
- 06142134Document10 pages06142134ebrahimNo ratings yet
- Real Time Energy Management - ETAPDocument2 pagesReal Time Energy Management - ETAPJoeDabidNo ratings yet
- ETAP-Short Circuit SoftwareDocument2 pagesETAP-Short Circuit SoftwaremshahidshaukatNo ratings yet
- Outdoor Power System: TP48200A-HD15A6Document2 pagesOutdoor Power System: TP48200A-HD15A6Mohammed Awaluddin Al-islamiNo ratings yet
- 15eel76 PSS Lab ManualDocument31 pages15eel76 PSS Lab ManualZoki50% (2)
- Thapar Institute of Engineering & Technology, PatialaDocument1 pageThapar Institute of Engineering & Technology, PatialaArnav MukherjeeNo ratings yet
- NPTEL Q SupportDocument4 pagesNPTEL Q SupportBarathNo ratings yet
- AeroCraft-Systems GB PDFDocument20 pagesAeroCraft-Systems GB PDFFerdiansyah Iqbal RafandiNo ratings yet
- Systems: Unit-V: Computer Control of PowerDocument14 pagesSystems: Unit-V: Computer Control of PowermaheshyadavNo ratings yet
- IEEEStd519 1992HarmonicLimits PDFDocument10 pagesIEEEStd519 1992HarmonicLimits PDFareina7No ratings yet
- SSR With Facts StatcomDocument287 pagesSSR With Facts StatcomArun JosephNo ratings yet
- Technical-Economic Analysis of Series Capacitor CompensationDocument54 pagesTechnical-Economic Analysis of Series Capacitor CompensationNaserian SalvyNo ratings yet
- sjzl20092134-ZXUPS S606&S610 (V1.1) Installation Manual PDFDocument77 pagessjzl20092134-ZXUPS S606&S610 (V1.1) Installation Manual PDFRamiz3zNo ratings yet
- Ieee Colorbooks Powerpack FactsDocument2 pagesIeee Colorbooks Powerpack FactsfolskanNo ratings yet
- Ee6501 Psa 2 Marks Q&ADocument15 pagesEe6501 Psa 2 Marks Q&AMonarch J ParmarNo ratings yet
- Chapter 1. Introduction Understanding Power System HarmonicsDocument2 pagesChapter 1. Introduction Understanding Power System HarmonicsKish KhiradkNo ratings yet
- Concepts For SSR v6Document37 pagesConcepts For SSR v6Awadhesh JaiswalNo ratings yet
- Role of DSTATCOM for Power Quality ImprovementDocument56 pagesRole of DSTATCOM for Power Quality Improvementprachi_shrivas100% (3)