You might also like
- Les 49 Livres Pour Obtenir La Richesse1Document51 pagesLes 49 Livres Pour Obtenir La Richesse1Zineb El88% (8)
- Cotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsDocument81 pagesCotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsomatrNo ratings yet
- 02 Convoyeur CorrigeDocument6 pages02 Convoyeur CorrigeYnsip Smix100% (10)
- TD4 Corrigé DIMENSIONNEMENT ET DUREE DE VIE DES ROULEMENTSDocument7 pagesTD4 Corrigé DIMENSIONNEMENT ET DUREE DE VIE DES ROULEMENTSأشرف عبودNo ratings yet
- Embrayage Frein Exercice Corrigé N°1Document4 pagesEmbrayage Frein Exercice Corrigé N°1Ramzi Tarchouni100% (12)
- Calcul Durée de Vie Des Roulements V2Document6 pagesCalcul Durée de Vie Des Roulements V2PLAKOST & CIENo ratings yet
- Corrigé Afs2016Document6 pagesCorrigé Afs2016Ibrahim Êl BæzNo ratings yet
- INS-MV 1E - Mon Beau Navire, Ô Ma MémoireDocument7 pagesINS-MV 1E - Mon Beau Navire, Ô Ma MémoireMister PiwiNo ratings yet
- Injection MotoDocument48 pagesInjection Motolulu3232100% (2)
- Perceuse Sensitive Oyaka Nyemb Nyobe EbolembabgDocument14 pagesPerceuse Sensitive Oyaka Nyemb Nyobe Ebolembabgngouo75% (4)
- Guidage en Translation PDFDocument141 pagesGuidage en Translation PDFkharrat samir100% (1)
- 8fa57-Perforateur A Papier Avec CorrectionDocument3 pages8fa57-Perforateur A Papier Avec CorrectionMajda El-aouni100% (3)
- Devoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesDevoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimMed Aymen Bensalem67% (3)
- Maintenance D'une Tour ParallèleDocument47 pagesMaintenance D'une Tour ParallèleLupi100% (7)
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouNo ratings yet
- Schéma Cinématique - 2020Document4 pagesSchéma Cinématique - 2020Mohsen LaabidiNo ratings yet
- 03 PerceuseDocument8 pages03 Perceusekhocine33% (3)
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 pagesDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- TD2 - Accouplement - Correction Inverseur de MarcheDocument6 pagesTD2 - Accouplement - Correction Inverseur de MarcheAbdelkhalek SaidiNo ratings yet
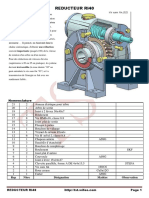
- Reducteur RI40Document6 pagesReducteur RI40watsop75% (4)
- Mecanismes A CamesDocument4 pagesMecanismes A CamesPatrick MinkoNo ratings yet
- Bride Hydraulique CorrigeDocument4 pagesBride Hydraulique CorrigeSalah Dark80% (5)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Document6 pagesDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Document6 pagesDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- Fonction AssemblageDocument32 pagesFonction AssemblageyahyaouiNo ratings yet
- Exercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - CorrigDocument2 pagesExercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - Corrigspectrum6675% (4)
- TD6 Schéma Ciné Touret À MeulerDocument2 pagesTD6 Schéma Ciné Touret À MeulerHamza Elallam100% (7)
- TD Palan Électrique À Chaine1Document2 pagesTD Palan Électrique À Chaine1Ncib_Mohsen_468383% (6)
- TD EmbrayageDocument3 pagesTD Embrayagematozo83% (12)
- 01-Lecon1 Analyse Fonctionnelle 2012-13Document8 pages01-Lecon1 Analyse Fonctionnelle 2012-13Med Aymen Bensalem100% (1)
- Analyse Fonctionnelle FraiseuseDocument5 pagesAnalyse Fonctionnelle FraiseuseTECH NEWS100% (4)
- Fraiseuse AutomatiqueDocument6 pagesFraiseuse AutomatiqueJawher Salem100% (1)
- Les Belges Dans L'afrique Centrale Tome IIIDocument534 pagesLes Belges Dans L'afrique Centrale Tome IIIVictor RosezNo ratings yet
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemNo ratings yet
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemNo ratings yet
- TD - Théorie Des Mécanismes Pompe À Piston Radial: CorrigéDocument8 pagesTD - Théorie Des Mécanismes Pompe À Piston Radial: Corrigéسكينة مريم100% (2)
- TD 16 Corrigé - Liaisons - Schéma CinématiqueDocument5 pagesTD 16 Corrigé - Liaisons - Schéma Cinématiquelfadli67% (3)
- TD Cna-CanDocument5 pagesTD Cna-CanEmmanuelNo ratings yet
- 02-Poupee Mobile CorrigeDocument5 pages02-Poupee Mobile CorrigeElmouden Mustapha75% (8)
- Joint de Cardant Et AccouplementDocument4 pagesJoint de Cardant Et AccouplementMIMFS100% (1)
- Ve Reglable Devoir de Synthese N 3 CorrigerDocument15 pagesVe Reglable Devoir de Synthese N 3 CorrigerJawher Salem74% (19)
- 3 Exercice EngrenageDocument9 pages3 Exercice EngrenageDhibMohamed0% (2)
- I. Les Cames:: 1. DefinitionDocument6 pagesI. Les Cames:: 1. DefinitionYassine Hnada0% (1)
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Gestion de Projet RapportDocument29 pagesGestion de Projet RapportMarizol Flores100% (1)
- Unité de Remplissage de BouteillesDocument4 pagesUnité de Remplissage de BouteillesMed Aymen Bensalem0% (1)
- Corrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MDocument5 pagesCorrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MArfaoui Aymen100% (1)
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- T.P 02 (V2) CorrigésDocument4 pagesT.P 02 (V2) CorrigésMrnadhir Mecanique100% (1)
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Analyse Fonctionnelle Interne D'un ProduitDocument5 pagesAnalyse Fonctionnelle Interne D'un ProduitMohsen Laabidi100% (1)
- TD Sur Les Embrayage - FreinDocument5 pagesTD Sur Les Embrayage - Freingerard correa86% (7)
- Exercice Limiteur de CoupleDocument4 pagesExercice Limiteur de CoupleMortadha Rabah100% (1)
- Devoir de Contrôle N°1 Avec Correction - Génie Mécanique - Trottinette Electrique - 3ème Technique (2018-2019) MR JEMAI LotfiDocument9 pagesDevoir de Contrôle N°1 Avec Correction - Génie Mécanique - Trottinette Electrique - 3ème Technique (2018-2019) MR JEMAI LotfiMrnadhir Mecanique100% (4)
- DS1 Scie Sauteuse 2010Document4 pagesDS1 Scie Sauteuse 2010mecaniquesti100% (1)
- TD Poulie CourroieDocument2 pagesTD Poulie CourroieAbdellah Faqdani100% (2)
- TD Limiteur de CoupleDocument2 pagesTD Limiteur de CoupleHamami Aymen100% (2)
- C Engrenage Vis Ecrou PDFDocument2 pagesC Engrenage Vis Ecrou PDFIbra Moulay100% (1)
- Capteur PneumatiqueDocument6 pagesCapteur Pneumatiquemom bakkouch100% (1)
- Les Montage Des Roulements Type BCDocument2 pagesLes Montage Des Roulements Type BCkhocine100% (4)
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiNo ratings yet
- 07 Butee Trainard CorrigeDocument5 pages07 Butee Trainard CorrigeHkiri MohamedNo ratings yet
- Semestre 2 DS 1 2008-2009 Leve Personne OriorDocument8 pagesSemestre 2 DS 1 2008-2009 Leve Personne OriorKhawla BkNo ratings yet
- Boite de VitesseDocument8 pagesBoite de VitesseHamami AymenNo ratings yet
- CameDocument7 pagesCamemasteratsiiNo ratings yet
- Technique CDocument8 pagesTechnique CKarim FathiNo ratings yet
- Le Montage D'usinage Corrigé PDFDocument4 pagesLe Montage D'usinage Corrigé PDFD. n50% (2)
- TD CI - 001b (Scie Sauteuse) Analyse Liaisons - V 2022.0Document8 pagesTD CI - 001b (Scie Sauteuse) Analyse Liaisons - V 2022.0louna yunaNo ratings yet
- Cours Tournage PDFDocument10 pagesCours Tournage PDFOumeima ChaoualiNo ratings yet
- 06 Trancheur MecaDocument10 pages06 Trancheur MecaYahya AIDARANo ratings yet
- Soudage Par ResistanceDocument22 pagesSoudage Par ResistanceBah0% (1)
- DS3 LAISONS FL-1AS-Bride+a+machoires - 2015Document5 pagesDS3 LAISONS FL-1AS-Bride+a+machoires - 2015Med Aymen BensalemNo ratings yet
- Correction Devoirdecontrolen2 1as 2019Document2 pagesCorrection Devoirdecontrolen2 1as 2019Med Aymen BensalemNo ratings yet
- Exercice LiaisonDocument2 pagesExercice LiaisonMed Aymen BensalemNo ratings yet
- 2-Devoir de Controle N1-1AS-2021-FLBDocument2 pages2-Devoir de Controle N1-1AS-2021-FLBMed Aymen BensalemNo ratings yet
- d2 Éme C1Document4 pagesd2 Éme C1Med Aymen BensalemNo ratings yet
- Test2 1°A SollcitationDocument1 pageTest2 1°A SollcitationMed Aymen BensalemNo ratings yet
- Devoir SollicitationDocument1 pageDevoir SollicitationMed Aymen BensalemNo ratings yet
- 2A Devoir S1 (TM)Document8 pages2A Devoir S1 (TM)Med Aymen BensalemNo ratings yet
- Devoir de Synthèse N°1 - Technologie - 1ère AS (2002-2003) MR GassoumiDocument4 pagesDevoir de Synthèse N°1 - Technologie - 1ère AS (2002-2003) MR GassoumiMed Aymen BensalemNo ratings yet
- Devoir de Contrôle N°1 (2A) TMDocument4 pagesDevoir de Contrôle N°1 (2A) TMMed Aymen BensalemNo ratings yet
- DC 1 Devoir DC G2 CorrectionDocument4 pagesDC 1 Devoir DC G2 CorrectionMed Aymen BensalemNo ratings yet
- Soll I CitationDocument1 pageSoll I CitationMed Aymen BensalemNo ratings yet
- 02 TerminologieDocument16 pages02 TerminologiekhocineNo ratings yet
- Dimensionnement ClavetteDocument4 pagesDimensionnement ClavetteSimoMonkadNo ratings yet
- Application 1 Er AnnéeDocument1 pageApplication 1 Er AnnéeMed Aymen BensalemNo ratings yet
- Représentation Fonctionnelle D'un Système 2012Document5 pagesReprésentation Fonctionnelle D'un Système 2012Med Aymen BensalemNo ratings yet
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- N3 2013 MecanismeDeReglageDeCapteurDocument5 pagesN3 2013 MecanismeDeReglageDeCapteurMed Aymen Bensalem100% (1)
- Chariot MonorailDocument1 pageChariot MonorailMed Aymen BensalemNo ratings yet
- Logique CombinatoireDocument5 pagesLogique CombinatoireMed Aymen BensalemNo ratings yet
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- Liaisons PDFDocument8 pagesLiaisons PDFTriki BilelNo ratings yet
- Analyse Fonct InterneDocument9 pagesAnalyse Fonct InterneMed Aymen BensalemNo ratings yet
- Arrêté 11 047 Du 4-12-95 (Mandat Sanitaire)Document2 pagesArrêté 11 047 Du 4-12-95 (Mandat Sanitaire)la020576No ratings yet
- Devoir Blanc VDocument6 pagesDevoir Blanc Vzack slNo ratings yet
- Sontrach Théme FormationDocument261 pagesSontrach Théme Formationsamir chelliNo ratings yet
- Cours RNDocument13 pagesCours RNCédric KueteNo ratings yet
- Catalogue Multimetrix - 2017Document16 pagesCatalogue Multimetrix - 2017ZorbanfrNo ratings yet
- ds2 sp2022Document2 pagesds2 sp2022lolocheeNo ratings yet
- Arrete Demat Bo 7106 07 07 2022 FRDocument7 pagesArrete Demat Bo 7106 07 07 2022 FRh.numelecNo ratings yet
- Qe65Q6Fnatxxc: L'image, Et Rien D'autreDocument3 pagesQe65Q6Fnatxxc: L'image, Et Rien D'autreahmed oujNo ratings yet
- Maths Bac D18Document2 pagesMaths Bac D18Haibellah LehbibNo ratings yet
- Memoire Final2020Document113 pagesMemoire Final2020Miss VlogsNo ratings yet
- 5ASP FRDocument2 pages5ASP FREurobrake Kevin Durand MericeNo ratings yet
- Fiche Analyser Saposition ConcurentielleDocument3 pagesFiche Analyser Saposition ConcurentielleAdamNo ratings yet
- Planification de La Production de L'écrit.Document1 pagePlanification de La Production de L'écrit.samoyNo ratings yet
- 15 - Étude Des Potentialités en Minéralisation Aurifères - KRAOMADocument147 pages15 - Étude Des Potentialités en Minéralisation Aurifères - KRAOMAMamonjy AndryNo ratings yet
- Kone Farida MemoireDocument77 pagesKone Farida MemoireDavidNo ratings yet
- Examen 1 Physique Nucléaire 2023-2024Document1 pageExamen 1 Physique Nucléaire 2023-2024ezzahidysaid91No ratings yet
- ChicoDocument60 pagesChicoMihaela CaracușNo ratings yet
- Benaissa 1993Document12 pagesBenaissa 1993Ramzi ChemaliNo ratings yet
- CDS7Document4 pagesCDS7Omar SavNo ratings yet
- Matlab2009 tp6Document3 pagesMatlab2009 tp6Abdel DaaNo ratings yet
- BTS 2Document6 pagesBTS 2Demorex KeuhouaNo ratings yet
- TD 1Document4 pagesTD 1lea lamNo ratings yet
- Facturation Hospitalière DHSADocument23 pagesFacturation Hospitalière DHSAYouness AznagNo ratings yet
- Rémy Chauvin - Les Secrets Des PortulansDocument171 pagesRémy Chauvin - Les Secrets Des PortulansEric ChabertNo ratings yet