You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Time Series Forecasting - Project ReportDocument68 pagesTime Series Forecasting - Project ReportKhursheedKhan50% (2)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Introduction to the simulation of power plants for EBSILON®Professional Version 15From EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15No ratings yet
- Teknik Kendali Digital PDFDocument230 pagesTeknik Kendali Digital PDFWahyu Juliarto100% (3)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Chapter 3 Semiconductor Basics and Wafer ManufacturingDocument44 pagesChapter 3 Semiconductor Basics and Wafer Manufacturing李承家No ratings yet
- Marcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerDocument8 pagesMarcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerYosaphat Kiko Paramore DiggoryNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityDocument39 pagesAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaNo ratings yet
- Paper 19 Revised PDFDocument520 pagesPaper 19 Revised PDFAmey Mehta100% (1)
- 9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsDocument9 pages9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsChandrasekar ElankannanNo ratings yet
- Week 12 - Control SystemDocument30 pagesWeek 12 - Control SystemAzizan Anuar100% (1)
- Pid Control ch8 PDFDocument22 pagesPid Control ch8 PDFGholamreza IlkhaniNo ratings yet
- Unit 8 Risk in The WorkplaceDocument11 pagesUnit 8 Risk in The WorkplaceAnonymous WalvB8No ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- PfizerWorks structure improves efficiencyDocument2 pagesPfizerWorks structure improves efficiencyDigitizedReaper73% (11)
- EIA GuidelineDocument224 pagesEIA GuidelineAjlaa RahimNo ratings yet
- 0: at J P Z 'Abcdededededededefghij: Your Account at A GlanceDocument4 pages0: at J P Z 'Abcdededededededefghij: Your Account at A Glancethihakoko100% (2)
- OilField Review 2016 Cement EvaluationDocument10 pagesOilField Review 2016 Cement EvaluationLuisNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Week 2Document13 pagesWeek 2Abdinasir AliNo ratings yet
- ControllersDocument32 pagesControllersEric KamauNo ratings yet
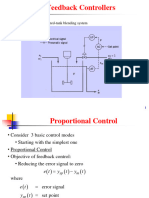
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument42 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemJoy RoyNo ratings yet
- ERT 321 Process Control & Dynamics: Feedback ControllersDocument34 pagesERT 321 Process Control & Dynamics: Feedback Controllershakita86No ratings yet
- Week 9Document21 pagesWeek 9candan.erkenNo ratings yet
- Process Dynamics and Control: Chapter 8 LecturesDocument33 pagesProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamNo ratings yet
- Chapter 8Document31 pagesChapter 8fosterNo ratings yet
- Feedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemDocument24 pagesFeedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemRama ChilpuriNo ratings yet
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument18 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniNo ratings yet
- PDC Chapter 8Document49 pagesPDC Chapter 8satya sagarNo ratings yet
- Chapter 8 - Feedback ControllerDocument35 pagesChapter 8 - Feedback ControllerFakhrulShahrilEzanieNo ratings yet
- Controller PrincipleDocument24 pagesController PrinciplePortia ShilengeNo ratings yet
- Feedback Controller: Proportional, Integral, Derivative (PID)Document34 pagesFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- Week 10-Feedback ControlDocument34 pagesWeek 10-Feedback ControlMohd Aizad100% (1)
- Control SystemDocument48 pagesControl SystemOlawale John AdeotiNo ratings yet
- Proportional Integral Derivative PID ControlsDocument13 pagesProportional Integral Derivative PID Controlsapi-376515075% (4)
- Digital Pid Controller 175Document6 pagesDigital Pid Controller 175andr14272No ratings yet
- KMM411E - Lesson7a - Feedback Controllers - 14nov2022Document56 pagesKMM411E - Lesson7a - Feedback Controllers - 14nov2022hairen jegerNo ratings yet
- Process Chapter 3Document35 pagesProcess Chapter 3Estifanos FitsumNo ratings yet
- Servo FundamentalsDocument11 pagesServo Fundamentalsapi-3797895No ratings yet
- IAM Proportional Integral Derivative PID ControlsDocument13 pagesIAM Proportional Integral Derivative PID ControlsIndustrial Automation and MechatronicsNo ratings yet
- Pic FBDocument65 pagesPic FBSamaid AbdullahNo ratings yet
- Filehost 6544062 Daniel Goleman Inteligenta EmotinalaDocument11 pagesFilehost 6544062 Daniel Goleman Inteligenta EmotinalaAdrian-Daniel NechitaNo ratings yet
- PID ControllerDocument22 pagesPID ControllerannonymousNo ratings yet
- Process Control Trainer Document SummaryDocument8 pagesProcess Control Trainer Document Summaryanuj kumarNo ratings yet
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocument34 pagesProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshNo ratings yet
- Task2 1 Specific Training-EnDocument35 pagesTask2 1 Specific Training-EnSantiago LarrazNo ratings yet
- 2 Automatic ControllersDocument26 pages2 Automatic ControllersCupa no DensetsuNo ratings yet
- InTech-Pid Control TheoryDocument17 pagesInTech-Pid Control TheoryAbner BezerraNo ratings yet
- 8.1. Lab ObjectiveDocument6 pages8.1. Lab ObjectiveJang-Suh Justin LeeNo ratings yet
- Pid CernDocument98 pagesPid CernsybaritzNo ratings yet
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsDocument32 pagesControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- Real-Time Digital Control Systems ExplainedDocument409 pagesReal-Time Digital Control Systems Explainedsltan_1200100% (2)
- 4 Transfer FunctionDocument22 pages4 Transfer FunctionSalihin FhooziNo ratings yet
- L-14 (SS) (Iac) ( (Ee) Nptel)Document10 pagesL-14 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Synthesis, Characterization and Microwave Absorption Properties of Dendrite-Like Fe O Embedded Within Amorphous Sugar Carbon MatrixDocument10 pagesSynthesis, Characterization and Microwave Absorption Properties of Dendrite-Like Fe O Embedded Within Amorphous Sugar Carbon Matrix李承家No ratings yet
- Raman Microspectroscopy of Soot and Related Carbonaceous Materials. Spectral Analysis and Structural Information PDFDocument12 pagesRaman Microspectroscopy of Soot and Related Carbonaceous Materials. Spectral Analysis and Structural Information PDFDavidNo ratings yet
- Carbon Monoxide As A Selective Reducing Agent in Organic ChemistryDocument10 pagesCarbon Monoxide As A Selective Reducing Agent in Organic Chemistry李承家No ratings yet
- Catalysts 04 00226Document30 pagesCatalysts 04 00226李承家100% (1)
- Oxygen Pathways in Oxidative Coupling of Methane and Related ProcessesDocument11 pagesOxygen Pathways in Oxidative Coupling of Methane and Related Processes李承家No ratings yet
- 1 s2.0 S0021951713003734 MainDocument9 pages1 s2.0 S0021951713003734 Main李承家No ratings yet
- Applied Catalysis A: General: Wei Di, Jihong Cheng, Shuxun Tian, Jing Li, Jingyun Chen, Qi SunDocument16 pagesApplied Catalysis A: General: Wei Di, Jihong Cheng, Shuxun Tian, Jing Li, Jingyun Chen, Qi Sun李承家No ratings yet
- Advances and Innovations of Heterogeneous Catalysis - v2 (YCL)Document15 pagesAdvances and Innovations of Heterogeneous Catalysis - v2 (YCL)李承家No ratings yet
- Chapter 14Document6 pagesChapter 14李承家No ratings yet
- Introduction to IC Fabrication ProcessesDocument19 pagesIntroduction to IC Fabrication Processes李承家No ratings yet
- Studies On Oxidative Coupling of Methane UsingDocument14 pagesStudies On Oxidative Coupling of Methane Using李承家No ratings yet
- Problem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocument15 pagesProblem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家No ratings yet
- Problem Set 4.5: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocument8 pagesProblem Set 4.5: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家No ratings yet
- Problem Set 4.4: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocument18 pagesProblem Set 4.4: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家No ratings yet
- Control System Instrumentation: Transducers and TransmittersDocument7 pagesControl System Instrumentation: Transducers and Transmitters李承家No ratings yet
- Problem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocument15 pagesProblem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家No ratings yet
- Chapter 13Document16 pagesChapter 13李承家No ratings yet
- Transfer Function Models: Development of Transfer FunctionsDocument16 pagesTransfer Function Models: Development of Transfer Functions李承家No ratings yet
- Chapter 13Document16 pagesChapter 13李承家No ratings yet
- Chapter 10Document13 pagesChapter 10李承家No ratings yet
- Theoretical Models of CH Ilp Chemical ProcessesDocument14 pagesTheoretical Models of CH Ilp Chemical Processes李承家No ratings yet
- More General Transfer Function Models: Bs Gs AsDocument21 pagesMore General Transfer Function Models: Bs Gs As李承家No ratings yet
- Control System Instrumentation: Transducers and TransmittersDocument7 pagesControl System Instrumentation: Transducers and Transmitters李承家No ratings yet
- Introduction To Process ControlDocument16 pagesIntroduction To Process Control李承家No ratings yet
- Development of Empirical Models From Process Data: - An Attractive AlternativeDocument10 pagesDevelopment of Empirical Models From Process Data: - An Attractive Alternative李承家No ratings yet
- Chapter 5Document20 pagesChapter 5Ana PereiraNo ratings yet
- Introduction To Process ControlDocument16 pagesIntroduction To Process Control李承家No ratings yet
- Laplace Transforms: LinearDocument11 pagesLaplace Transforms: Linear李承家No ratings yet
- Keyence Laser MicrometerDocument20 pagesKeyence Laser MicrometerimrancenakkNo ratings yet
- E. Market Size PotentialDocument4 pagesE. Market Size Potentialmesadaeterjohn.studentNo ratings yet
- Marantz CD4000 PDFDocument28 pagesMarantz CD4000 PDFboroda2410No ratings yet
- Edgevpldt Legazpi - Ee As-Built 121922Document10 pagesEdgevpldt Legazpi - Ee As-Built 121922Debussy PanganibanNo ratings yet
- Reconciling Informal and Formal TradeDocument194 pagesReconciling Informal and Formal TradeBaterias BateriasNo ratings yet
- Block P2P Traffic with pfSense using Suricata IPSDocument6 pagesBlock P2P Traffic with pfSense using Suricata IPSEder Luiz Alves PintoNo ratings yet
- PC-II Taftan Master PlanDocument15 pagesPC-II Taftan Master PlanMunir HussainNo ratings yet
- Creating A Simple PHP Forum TutorialDocument14 pagesCreating A Simple PHP Forum TutorialLaz CaliphsNo ratings yet
- Foreign Direct Investment in Mongolia An Interactive Case Study (USAID, 2007)Document266 pagesForeign Direct Investment in Mongolia An Interactive Case Study (USAID, 2007)Oyuna Bat-OchirNo ratings yet
- Section - I: Cover Page Section - II:: IndexDocument21 pagesSection - I: Cover Page Section - II:: Indexamit rajputNo ratings yet
- Folic AcidDocument5 pagesFolic Acidjyoti singhNo ratings yet
- 6 Hagonoy V NLRCDocument2 pages6 Hagonoy V NLRCChristiane Marie Bajada0% (1)
- Computers in Human Behavior: Full Length ArticleDocument9 pagesComputers in Human Behavior: Full Length Articlenabilla rusdiNo ratings yet
- 19286711Document8 pages19286711suruth242100% (1)
- In Gov cbse-SSCER-191298202020 PDFDocument1 pageIn Gov cbse-SSCER-191298202020 PDFrishichauhan25No ratings yet
- Deploy A REST API Using Serverless, Express and Node - JsDocument13 pagesDeploy A REST API Using Serverless, Express and Node - JszaninnNo ratings yet
- Frequently Asked Questions (And Answers) About eFPSDocument10 pagesFrequently Asked Questions (And Answers) About eFPSghingker_blopNo ratings yet
- Oyo Summer Internship ReportDocument31 pagesOyo Summer Internship ReportJayasree S RNo ratings yet
- Introduction Electrical MotorDocument36 pagesIntroduction Electrical MotorYajidNo ratings yet
- Holmes 1993Document8 pagesHolmes 1993Rumaisa KrubaNo ratings yet
- Project Proposal: Retail Environment Design To Create Brand ExperienceDocument3 pagesProject Proposal: Retail Environment Design To Create Brand ExperienceMithin R KumarNo ratings yet
- Impact of COVIDDocument29 pagesImpact of COVIDMalkOo AnjumNo ratings yet