You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Problem Solving For MID 130 Volvo Gear Box Fault CodesDocument9 pagesProblem Solving For MID 130 Volvo Gear Box Fault CodesThan MinZawNo ratings yet
- Mi PowerDocument24 pagesMi PowerLinu Bhargavan67% (3)
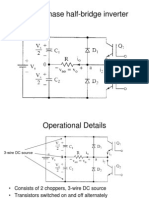
- Single-Phase Half-Bridge InverterDocument29 pagesSingle-Phase Half-Bridge InverterNoureddine BounaslaNo ratings yet
- Grey 1000Document4 pagesGrey 1000Waqas JavedNo ratings yet
- Single-Phase Half-Bridge InverterDocument29 pagesSingle-Phase Half-Bridge InverterNoureddine BounaslaNo ratings yet
- DC As ComputerDocument92 pagesDC As ComputerWaqas JavedNo ratings yet
- Nokia N97mini User ManualDocument147 pagesNokia N97mini User ManualThilina Dhanushka GuluwitaNo ratings yet
- Guide For The Design and Production of LV Power Factor Correction CubiclesDocument76 pagesGuide For The Design and Production of LV Power Factor Correction CubiclesGunadevan Chandrasekaran100% (1)
- Grey 1000Document4 pagesGrey 1000Waqas JavedNo ratings yet
- InrushDocument3 pagesInrushDhita Rurin AdistyaningsihNo ratings yet
- Abb LV CapacitorDocument20 pagesAbb LV Capacitorerkamlakar2234No ratings yet
- PEC Renewal Form 5A - REDocument1 pagePEC Renewal Form 5A - REWaqas JavedNo ratings yet
- Abb LV CapacitorDocument20 pagesAbb LV Capacitorerkamlakar2234No ratings yet
- FetDocument50 pagesFetWaqas JavedNo ratings yet
- Lab 7Document13 pagesLab 7Waqas JavedNo ratings yet
- ElectricalDocument20 pagesElectricalWaqas JavedNo ratings yet
- Notes 01 Introduction To Power ElectronicsDocument138 pagesNotes 01 Introduction To Power ElectronicsPARTHIBAN.BNo ratings yet
- DeskonDocument1 pageDeskonWaqas JavedNo ratings yet
- DeskonDocument1 pageDeskonWaqas JavedNo ratings yet
- Start Up Scholarship 2013Document1 pageStart Up Scholarship 2013Waqas JavedNo ratings yet
- Catalogue Auto Recloser Shinsung HimeloDocument9 pagesCatalogue Auto Recloser Shinsung HimeloRuly Chandra AgungNo ratings yet
- Ingersoll Rand MH37 Ops & Maint ManualDocument44 pagesIngersoll Rand MH37 Ops & Maint ManualjiangshencaoNo ratings yet
- Cable Sizing CalculationDocument72 pagesCable Sizing CalculationHARI my songs100% (1)
- 15eel76 PSS Lab ManualDocument31 pages15eel76 PSS Lab ManualZoki50% (2)
- Control and Protection of Hydro Electric Power PlantDocument181 pagesControl and Protection of Hydro Electric Power PlantMd Abdul Raheman33% (3)
- Electrical Safety Systems in Escalators: ArticleDocument16 pagesElectrical Safety Systems in Escalators: ArticleMohammed SajidNo ratings yet
- SEPED303005EN Dec20Document286 pagesSEPED303005EN Dec20widiNo ratings yet
- Guide to installing and using a Cartek Battery IsolatorDocument11 pagesGuide to installing and using a Cartek Battery IsolatorwillyhuaNo ratings yet
- ZS2 Panel ManualDocument40 pagesZS2 Panel Manualanon_923405247100% (2)
- Materials System SpecificationDocument5 pagesMaterials System SpecificationFlorante NoblezaNo ratings yet
- 11549-3 - PB57Fe - FMZ5000 .Indd PDFDocument2 pages11549-3 - PB57Fe - FMZ5000 .Indd PDFbahmanNo ratings yet
- Application of Polarisation Depolarisation Current (PDC) Technique OnDocument9 pagesApplication of Polarisation Depolarisation Current (PDC) Technique OnandikaubhNo ratings yet
- Kea 091 NSTRDocument7 pagesKea 091 NSTRamin shirkhaniNo ratings yet
- Datasheet - X-DA4125EN With 24 VDC - EN2.5Document2 pagesDatasheet - X-DA4125EN With 24 VDC - EN2.5Walid DerradjiNo ratings yet
- 416D, 420D, 424D, 428D, 430D, 432D, 438D, and 442D ESQUEMA ELECTRICODocument16 pages416D, 420D, 424D, 428D, 430D, 432D, 438D, and 442D ESQUEMA ELECTRICORichard BasurtoNo ratings yet
- Model Questions of SWITCHGEAR & PROTECTIONDocument2 pagesModel Questions of SWITCHGEAR & PROTECTIONSaroj kumar BiswasNo ratings yet
- Ds-En 2502352 Iki-50 1FR2Document9 pagesDs-En 2502352 Iki-50 1FR2saulNo ratings yet
- MCB (Miniature Circuit Breakers) - Types, Working and Trip CurvesDocument23 pagesMCB (Miniature Circuit Breakers) - Types, Working and Trip CurvesNakka Srikanth RajNo ratings yet
- VACON NX Liquid Cooled Drives User Manual DPD00887I UKDocument262 pagesVACON NX Liquid Cooled Drives User Manual DPD00887I UKLv XiaomingNo ratings yet
- Defecte ABS PDFDocument85 pagesDefecte ABS PDFKorisnik1956No ratings yet
- TROUBLESHOOTINGDocument6 pagesTROUBLESHOOTINGDede R KurniawanNo ratings yet
- Eaton Ats Breaker Design Guide Dg140002enDocument27 pagesEaton Ats Breaker Design Guide Dg140002enjeorginagNo ratings yet
- P. K. Pattanaik Ieema Journal March 2021Document7 pagesP. K. Pattanaik Ieema Journal March 2021kjushnNo ratings yet
- GST Fire Alarm System-CatalogDocument72 pagesGST Fire Alarm System-Catalogadityapraztt75% (4)
- Cahier Technique No 172 System EarthingsDocument30 pagesCahier Technique No 172 System EarthingsKhadiga AbdallahNo ratings yet
- Part 1 General Electrical Specification v4Document15 pagesPart 1 General Electrical Specification v4godspower brunoNo ratings yet
- Calculate 3-Phase Short Circuit Current Using Impedance MethodDocument10 pagesCalculate 3-Phase Short Circuit Current Using Impedance MethodOsama ElhadadNo ratings yet
- Oos and TorsionDocument14 pagesOos and TorsionlisusedNo ratings yet