You might also like
- Correction TD SynchroneDocument4 pagesCorrection TD SynchroneAloui Jihen0% (1)
- Rapport Alternateur TriphaseDocument9 pagesRapport Alternateur TriphaseSami ZakhnoufNo ratings yet
- Cours Machine Synchrone TgettDocument22 pagesCours Machine Synchrone TgettJosef PrinceNo ratings yet
- Chapitre Iii Machines A Courant ContinuDocument16 pagesChapitre Iii Machines A Courant ContinuBousmaha YoucefNo ratings yet
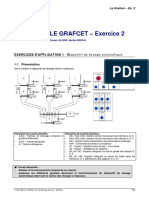
- Grafcet ExerciceDocument2 pagesGrafcet ExerciceKhaled Ouni33% (3)
- 37-Le Demarrage Etoile-TriangleDocument5 pages37-Le Demarrage Etoile-TrianglerobertNo ratings yet
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedNo ratings yet
- L'Électricité - Découvreurs et Inventeurs: Tome IVFrom EverandL'Électricité - Découvreurs et Inventeurs: Tome IVRating: 3 out of 5 stars3/5 (2)
- Exercices d'optique et d'électromagnétismeFrom EverandExercices d'optique et d'électromagnétismeRating: 5 out of 5 stars5/5 (1)
- Commande MCCDocument20 pagesCommande MCCMoez YoussefNo ratings yet
- Cours Commande Des MachinesDocument40 pagesCours Commande Des MachinesyaoNo ratings yet
- Redressement TriphaseDocument6 pagesRedressement TriphaseAymen Hssaini100% (1)
- Travaux Diriges Sur Le HacheurDocument4 pagesTravaux Diriges Sur Le HacheurJulesNo ratings yet
- Chap3 Machine AsynchroneDocument41 pagesChap3 Machine AsynchroneIlyas NahiNo ratings yet
- Exercice d'EPDocument2 pagesExercice d'EPwilfried soleil0% (1)
- TP 1 MCC A Excitation en SerieDocument6 pagesTP 1 MCC A Excitation en SerieBessem Bhiri67% (3)
- Machines SynchronesDocument16 pagesMachines SynchronesAyoub AkoucharNo ratings yet
- Chap1 Association Mcc-Convertisseurs Drid2020Document16 pagesChap1 Association Mcc-Convertisseurs Drid2020Mohamed BouNo ratings yet
- TP 02 1meltiDocument4 pagesTP 02 1meltikdjgkldfjlNo ratings yet
- TP M1 - Alternateur - Synchrone - Autonome PDFDocument3 pagesTP M1 - Alternateur - Synchrone - Autonome PDFKhī RãNo ratings yet
- TP Machine AsynchroneDocument5 pagesTP Machine AsynchroneMohammed Reda GailaNo ratings yet
- Tp1 MachineDocument11 pagesTp1 MachineDOUADI ChaymaNo ratings yet
- Machine À Courant ContinuDocument6 pagesMachine À Courant ContinuAli_Ghom_9843100% (1)
- Machine Synchrone Cours TGMDocument6 pagesMachine Synchrone Cours TGMSaid Mamou100% (3)
- Machine À Courant ÉléctriqueDocument21 pagesMachine À Courant ÉléctriqueYounesHamoudi100% (1)
- Simulation Des Machines À Courant Continu Dans L PDFDocument10 pagesSimulation Des Machines À Courant Continu Dans L PDFKa AissaNo ratings yet
- TP Commande D'une Machine À Courant Continu1Document9 pagesTP Commande D'une Machine À Courant Continu1OkbaNo ratings yet
- Chapitre 4 Moteur Courant Continu PDFDocument7 pagesChapitre 4 Moteur Courant Continu PDFKouki Nizar50% (2)
- TD Avec Solution MASDocument79 pagesTD Avec Solution MASOűłď Ællēm MöĥãmëdNo ratings yet
- Generatrices A Courant ContinuDocument12 pagesGeneratrices A Courant ContinuHajri Mohamed100% (2)
- 2F.C22 - Machine À Courant ContinuDocument5 pages2F.C22 - Machine À Courant ContinuUmar MuhammetNo ratings yet
- Polycopié Commande Des Systèmes Electro-ÉnergétiquesDocument31 pagesPolycopié Commande Des Systèmes Electro-Énergétiquesاحمد AHMED بوحوتةBOUHOUTANo ratings yet
- Exercices Corrigés Moteur Synchrone - Cours TechProDocument4 pagesExercices Corrigés Moteur Synchrone - Cours TechProImane ZahiriNo ratings yet
- Redresseurs Triphasés CommandésDocument8 pagesRedresseurs Triphasés Commandéskima lachgarNo ratings yet
- Alternateur TriphaseDocument29 pagesAlternateur TriphaseDerrouch Abderrahmane0% (1)
- TD Commande Des Machines ElectriqueDocument5 pagesTD Commande Des Machines Electriquesaid houairiNo ratings yet
- TDN°1 Commande Des Machines ElectriquesDocument8 pagesTDN°1 Commande Des Machines ElectriquesHamid OUTZGUINRIMT100% (1)
- Travaux Pratiques Commande MAS Commande PDFDocument31 pagesTravaux Pratiques Commande MAS Commande PDFLEBONGONo ratings yet
- Exercices MCCDocument4 pagesExercices MCCEl Idrissi Hajar0% (1)
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantNo ratings yet
- Moteur À Courant ContinuDocument3 pagesMoteur À Courant ContinuFaouzi TlemcenNo ratings yet
- TP2-Association moteur-courant-continu-redressement-PD3Document7 pagesTP2-Association moteur-courant-continu-redressement-PD3You Cef100% (1)
- Chapitre 2 - Répartition Économique de Puissance PDFDocument18 pagesChapitre 2 - Répartition Économique de Puissance PDFMagramane AbdennourNo ratings yet
- TP: Machine A Courant ContinueDocument9 pagesTP: Machine A Courant Continuerachid aekNo ratings yet
- MCC ExercicesDocument4 pagesMCC ExercicesGeDzenvi100% (1)
- Chapitre IIDocument25 pagesChapitre IIyoucefNo ratings yet
- Les MachinesDocument3 pagesLes Machineshamza100% (1)
- TD3 Machine Asynchrone BISDocument2 pagesTD3 Machine Asynchrone BISnawzat100% (1)
- Serie CC EvvDocument4 pagesSerie CC EvvNourBouzid100% (1)
- Techniques de La Commande ÉlectriqueDocument44 pagesTechniques de La Commande ÉlectriqueAli MEDJGHOU100% (1)
- FSTM - FI - GET3 - S5 - TP3 - Commande Scalaire - MASDocument8 pagesFSTM - FI - GET3 - S5 - TP3 - Commande Scalaire - MASabdessamad taoualNo ratings yet
- Bac Get MasDocument28 pagesBac Get MasKIDS APP100% (1)
- Commande - Des.machines - Chap1.introduction 2020Document79 pagesCommande - Des.machines - Chap1.introduction 2020Abdø AboulQasimNo ratings yet
- Support de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun SystèmeDocument16 pagesSupport de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun SystèmeTahrat ToufikNo ratings yet
- MAS Cours CompletDocument39 pagesMAS Cours Completطنين نسنسNo ratings yet
- Redresseur MLI Triphasé de TensionDocument28 pagesRedresseur MLI Triphasé de TensionStar Souf100% (8)
- TP2:Diagramme de Potier D'un Alternateur: Réaliser Par: Hassine Abir / Attig Houda Classe & Filiére & GroupeDocument2 pagesTP2:Diagramme de Potier D'un Alternateur: Réaliser Par: Hassine Abir / Attig Houda Classe & Filiére & GroupeSarra SdiriNo ratings yet
- 09 Principe de Fonctionnement Machine AsynchroneDocument16 pages09 Principe de Fonctionnement Machine AsynchroneTaoufiqBaouchNo ratings yet
- Chapitre 5 - Machine SynchroneDocument63 pagesChapitre 5 - Machine SynchroneOmom chamarohNo ratings yet
- Fiche TD2Document6 pagesFiche TD2Ромаисса Самед0% (1)
- Exercices Moteur AsynchroneDocument17 pagesExercices Moteur AsynchroneismailNo ratings yet
- TD Génératrice CC1 PDFDocument1 pageTD Génératrice CC1 PDFAdil EL AttarNo ratings yet
- CH 5Document84 pagesCH 5Mouhsin RNo ratings yet
- Variation de Vitesse Des Moteurs Asynchrones: Identifier, Choisir Un Modulateur Pour Moteur Asynchrone TriphaséDocument69 pagesVariation de Vitesse Des Moteurs Asynchrones: Identifier, Choisir Un Modulateur Pour Moteur Asynchrone TriphaséHîChàmBàQàsNo ratings yet
- 8-3 - Modelisation Des MCCDocument13 pages8-3 - Modelisation Des MCCfia9aNo ratings yet
- TP Commande D'une Machine MCCDocument8 pagesTP Commande D'une Machine MCCMajected92No ratings yet
- 8-3 - Modelisation Des MCCDocument13 pages8-3 - Modelisation Des MCCfia9aNo ratings yet
- Moteur UniverselDocument1 pageMoteur UniverselMajected92No ratings yet
- Trans ZDocument8 pagesTrans ZMajected92No ratings yet
- Les Alimentations ElectriquesDocument74 pagesLes Alimentations Electriquesabdoulkader tapsobaNo ratings yet
- CyberPower K01-C000043-02 UM OLS6000-10000E (XL) FRDocument40 pagesCyberPower K01-C000043-02 UM OLS6000-10000E (XL) FRMido AzNo ratings yet
- Le Transistor Bipolaire en Haute Frequence PDFDocument4 pagesLe Transistor Bipolaire en Haute Frequence PDFAmalNo ratings yet
- Correction de L'examen2021Document3 pagesCorrection de L'examen2021blbmalekNo ratings yet
- Chap3 BJT 2ppDocument14 pagesChap3 BJT 2ppIppo HajumeNo ratings yet
- CH 3Document17 pagesCH 3SALIHA EL ABKARINo ratings yet
- MK Ins in Do FR 81 v2Document8 pagesMK Ins in Do FR 81 v2Superviseur KGNo ratings yet
- Convertisseurs Statiques Pour La Variation de Vitesse Des MCCDocument15 pagesConvertisseurs Statiques Pour La Variation de Vitesse Des MCCdouahfadelaNo ratings yet
- Capture D'écran . 2022-12-03 À 08.06.43Document12 pagesCapture D'écran . 2022-12-03 À 08.06.43Rey UlreyNo ratings yet
- 5 Cours TTL CompletDocument47 pages5 Cours TTL CompletHAMZA WADIHNo ratings yet
- Catalogue Condense PDFDocument99 pagesCatalogue Condense PDFIvan IntroNo ratings yet
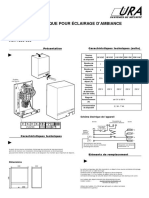
- Coffret Anti Panique URADocument2 pagesCoffret Anti Panique URAguyNo ratings yet
- Université Abdelmalek Essaadi Faculté Polydisciplinaire de Larache Travaux Pratiques Electronique de BaseDocument10 pagesUniversité Abdelmalek Essaadi Faculté Polydisciplinaire de Larache Travaux Pratiques Electronique de BaseKhaoula ChetouanNo ratings yet
- Modélisation Numérique Par La Méthode Des Éléments Finis Des Systèmes Électrotechniques: Recherche Du Régime PermanentDocument190 pagesModélisation Numérique Par La Méthode Des Éléments Finis Des Systèmes Électrotechniques: Recherche Du Régime PermanentOthman Ben CheikhNo ratings yet
- Notions Fondamentales Sur Le Démarrage Des MoteursDocument43 pagesNotions Fondamentales Sur Le Démarrage Des Moteursdegdoug100% (1)
- MaintenanceDocument11 pagesMaintenanceEL MONADY Mohammed100% (1)
- CATALOGUE DUCHENE 2012Document159 pagesCATALOGUE DUCHENE 2012Nice OrioleNo ratings yet
- Montage Commune - Recherche GoogleDocument1 pageMontage Commune - Recherche GoogleJúniõr Swanky Jr.No ratings yet
- Travaux Dirigés Électroniques Analogiques PDFDocument2 pagesTravaux Dirigés Électroniques Analogiques PDFAbdoulaye DiopNo ratings yet
- Sujet Corrige-Moteur Asynchrone PDFDocument3 pagesSujet Corrige-Moteur Asynchrone PDFAmine LôrênzoNo ratings yet
- Régime de Neutre ITDocument17 pagesRégime de Neutre ITKawtar BoukbirNo ratings yet
- Sentron Cataloque 2106 2017 FR InternetDocument104 pagesSentron Cataloque 2106 2017 FR InternetbakhoucheNo ratings yet
- TD 01Document11 pagesTD 01Nizar ToujeniNo ratings yet
- 01892gr001ed LockedDocument8 pages01892gr001ed LockedEricNo ratings yet
- Eclairage de La Grand Place de BruxellesDocument2 pagesEclairage de La Grand Place de BruxellesWalckiersNo ratings yet
- Mini Projet Moteur AsynchroneDocument3 pagesMini Projet Moteur AsynchronehamidaNo ratings yet
- Eco DialDocument42 pagesEco DialRaphael ReignierNo ratings yet
- MERLIN GERIN VM6 Circuit Breaker Cublicle DM12 Type CompressedDocument35 pagesMERLIN GERIN VM6 Circuit Breaker Cublicle DM12 Type CompressedLawrence AlexNo ratings yet