You might also like
- Rate Transition: Changing The Rate of The Input Signals From Sample Time Ts To 10 TsDocument5 pagesRate Transition: Changing The Rate of The Input Signals From Sample Time Ts To 10 TsRatik MittalNo ratings yet
- (X, Y, Z) (X',y',z') : Io NL in eDocument4 pages(X, Y, Z) (X',y',z') : Io NL in eRatik MittalNo ratings yet
- Y X Z X: Sensor Wire Transmission LineDocument2 pagesY X Z X: Sensor Wire Transmission LineRatik MittalNo ratings yet
- Harmonic Analysis Model For Voltage Source Converter Under Unbalanced ConditionsDocument11 pagesHarmonic Analysis Model For Voltage Source Converter Under Unbalanced ConditionsRatik MittalNo ratings yet
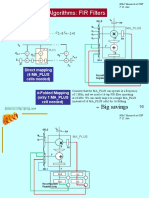
- HSoC Research Mapping Algorithms FIR FiltersDocument2 pagesHSoC Research Mapping Algorithms FIR FiltersRatik MittalNo ratings yet
- Mapping of Algorithms: FIR Filters: Big SavingsDocument2 pagesMapping of Algorithms: FIR Filters: Big SavingsRatik MittalNo ratings yet
- 3D MutInd Txline Xy Senor Xyz Simple 1 27aug2021Document2 pages3D MutInd Txline Xy Senor Xyz Simple 1 27aug2021Ratik MittalNo ratings yet
- Experimental islanding detection scheme based on modal componentsDocument11 pagesExperimental islanding detection scheme based on modal componentsRatik MittalNo ratings yet
- 3D MutInd Sprialsensor 3d Transmission Yz 8sep2021Document2 pages3D MutInd Sprialsensor 3d Transmission Yz 8sep2021Ratik MittalNo ratings yet
- 3D MutInd Txline Xy Senor Yz Simple 1 24aug2021Document1 page3D MutInd Txline Xy Senor Yz Simple 1 24aug2021Ratik MittalNo ratings yet
- LTC2645 PWM To Analog 1aug2019Document20 pagesLTC2645 PWM To Analog 1aug2019Ratik MittalNo ratings yet
- Current Sensing System For Protection of High Power Frequency ConvertersDocument5 pagesCurrent Sensing System For Protection of High Power Frequency ConvertersRatik MittalNo ratings yet
- 48-V, 10-A, High-Frequency PWM, 3-Phase Gan Inverter Reference Design For High-Speed Motor DrivesDocument44 pages48-V, 10-A, High-Frequency PWM, 3-Phase Gan Inverter Reference Design For High-Speed Motor DrivesRatik MittalNo ratings yet
- Verify 3 PPTX Files Marked With Check Are Non-RedundantDocument1 pageVerify 3 PPTX Files Marked With Check Are Non-RedundantRatik MittalNo ratings yet
- Perovskite: Colossal Magnetoresistance (CMR) EffectDocument3 pagesPerovskite: Colossal Magnetoresistance (CMR) EffectRatik MittalNo ratings yet
- PWM Full Bridge DC-DC Converter Homework AnalysisDocument9 pagesPWM Full Bridge DC-DC Converter Homework AnalysisRatik MittalNo ratings yet
- Samples Terminal of The Target DG: 4 KHZ Having A Fundamental Frequency of 50 HZDocument2 pagesSamples Terminal of The Target DG: 4 KHZ Having A Fundamental Frequency of 50 HZRatik MittalNo ratings yet
- Topic: Islanding DetectionDocument11 pagesTopic: Islanding DetectionRatik MittalNo ratings yet
- Mittal TP AnalogCMOS Abstract 4oct2018Document1 pageMittal TP AnalogCMOS Abstract 4oct2018Ratik MittalNo ratings yet
- Support Package Installer Has Detected An Inconsistency. - MATLAB Answers - MATLAB CentralDocument4 pagesSupport Package Installer Has Detected An Inconsistency. - MATLAB Answers - MATLAB CentralRatik MittalNo ratings yet
- Launch User GuideDocument30 pagesLaunch User GuideJeziel Vazquez NavaNo ratings yet
- Launch User GuideDocument30 pagesLaunch User GuideJeziel Vazquez NavaNo ratings yet
- Support Package Installer Has Detected An Inconsistency. - MATLAB Answers - MATLAB CentralDocument4 pagesSupport Package Installer Has Detected An Inconsistency. - MATLAB Answers - MATLAB CentralRatik MittalNo ratings yet
- Mittal TP AnalogCMOS Abstract 4oct2018Document1 pageMittal TP AnalogCMOS Abstract 4oct2018Ratik MittalNo ratings yet
- Inverter-Based Resource Performance Guideline NERCDocument97 pagesInverter-Based Resource Performance Guideline NERCSubhadeep PaladhiNo ratings yet
- M 0.8 M 39 F 47 HZ R 100 Ohms N 63 (Number of Harmonics)Document8 pagesM 0.8 M 39 F 47 HZ R 100 Ohms N 63 (Number of Harmonics)Ratik MittalNo ratings yet
- Mittal Wang RefSheets ICpartFE AnalogCMOS Fall2018Document4 pagesMittal Wang RefSheets ICpartFE AnalogCMOS Fall2018Ratik MittalNo ratings yet
- EEL6936 Homework - 1: Submitted By-Ratik Mittal U37601955Document1 pageEEL6936 Homework - 1: Submitted By-Ratik Mittal U37601955Ratik MittalNo ratings yet
- M 0.8 M 39 F 47 HZ R 100 Ohms N 63 (Number of Harmonics)Document8 pagesM 0.8 M 39 F 47 HZ R 100 Ohms N 63 (Number of Harmonics)Ratik MittalNo ratings yet
- HW 3 Final ReportDocument19 pagesHW 3 Final ReportRatik MittalNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ijoaem 202109Document20 pagesIjoaem 202109Sahadev RoyNo ratings yet
- Nearpeer MDCAT Physics by Prof Zia PDFDocument309 pagesNearpeer MDCAT Physics by Prof Zia PDFShoaib Yaseen80% (10)
- Principles of Reinforced and Prestressed Concrete: Module inDocument46 pagesPrinciples of Reinforced and Prestressed Concrete: Module inHatsuieeNo ratings yet
- Anif Jamaluddin: Prodi P.Fisika, PMIPA, FKIP, Universitas Sebelas Maret, SurakartaDocument21 pagesAnif Jamaluddin: Prodi P.Fisika, PMIPA, FKIP, Universitas Sebelas Maret, SurakartaApriyan P ArdhityaNo ratings yet
- Design of DomesDocument7 pagesDesign of DomesGandhi HammoudNo ratings yet
- Classification and Characteristics of Rolling Bearings Classification and Characteristics of Rolling BearingsDocument5 pagesClassification and Characteristics of Rolling Bearings Classification and Characteristics of Rolling Bearingsshahnawaz G 27No ratings yet
- Circles and conic sections review problemsDocument9 pagesCircles and conic sections review problemsMaze GomezNo ratings yet
- Fenner Keyless DrivesDocument56 pagesFenner Keyless DrivesroytamaltanuNo ratings yet
- M07 - Separation EquipmentDocument48 pagesM07 - Separation Equipmenthoghost123100% (2)
- Ijest NG Vol2 No2 Complete IssueDocument204 pagesIjest NG Vol2 No2 Complete IssueUkemebookieNo ratings yet
- AP Final Exam IIDocument21 pagesAP Final Exam IIRobert JonesNo ratings yet
- Chapter 9Document23 pagesChapter 9Ayush ChopraNo ratings yet
- 00hydr Fundamentals PDFDocument298 pages00hydr Fundamentals PDFpcalver2000No ratings yet
- An Atlas of Glass-Ionomer Cements - A Clinician's Guide, 3rd EditionDocument214 pagesAn Atlas of Glass-Ionomer Cements - A Clinician's Guide, 3rd EditionCasandra Costin100% (4)
- Project Report Mech-VibDocument19 pagesProject Report Mech-VibbabugaruNo ratings yet
- Welding ProcedureDocument8 pagesWelding ProcedurerohsingNo ratings yet
- For The Classes of Crystal: For Searching Project ReportsDocument15 pagesFor The Classes of Crystal: For Searching Project ReportsDhanapal PalNo ratings yet
- Lpile Input ParametersDocument1 pageLpile Input ParametersKresno N SoetomoNo ratings yet
- Envision - 8.3 Multiply Fractions and Whole NumbersDocument3 pagesEnvision - 8.3 Multiply Fractions and Whole NumbersMohamed A MoneimNo ratings yet
- Identifying and Preventing Dna Contamination in A Dna Typing LaboratoryDocument3 pagesIdentifying and Preventing Dna Contamination in A Dna Typing LaboratoryDette de LaraNo ratings yet
- Statistical Consequences of Fat Tails Te PDFDocument390 pagesStatistical Consequences of Fat Tails Te PDFtonitt100% (2)
- Product Sheet SYMAP General Information - Rev .0Document8 pagesProduct Sheet SYMAP General Information - Rev .0Keli KeyNo ratings yet
- Computer Applications Sample Paper ICSE 2020 PDFDocument11 pagesComputer Applications Sample Paper ICSE 2020 PDFritika prakashNo ratings yet
- General Physics 2 Electric FieldDocument28 pagesGeneral Physics 2 Electric FieldAriah KaliNo ratings yet
- Density ExperimentDocument4 pagesDensity ExperimentSamuel TumewaNo ratings yet
- How logic gates help design digital circuitsDocument19 pagesHow logic gates help design digital circuitsPraveen KumarNo ratings yet
- Compendium Book For IIT - MainsDocument28 pagesCompendium Book For IIT - MainsApex InstituteNo ratings yet
- Maxima and Minima ProblemsDocument44 pagesMaxima and Minima ProblemsMeggy Villanueva100% (2)
- BCD4-000-47-SPC-4-006-00 - rev0-REC General InstrumentationDocument23 pagesBCD4-000-47-SPC-4-006-00 - rev0-REC General InstrumentationRicardo NapitupuluNo ratings yet