You might also like
- Dynamics of Flight Stability and ControlDocument395 pagesDynamics of Flight Stability and Controllakicar2100% (32)
- 11+ Entrance Examination: Specimen PaperDocument8 pages11+ Entrance Examination: Specimen PaperNayem Hossain HemuNo ratings yet
- 12 Animation Q1 AnswerDocument38 pages12 Animation Q1 AnswerBilly Joe TanNo ratings yet
- Sip TrainingDocument96 pagesSip Trainingronics123No ratings yet
- Appliance ShipmentsDocument10 pagesAppliance ShipmentsnNo ratings yet
- Methods For Assessing The Stability of Slopes During Earthquakes-A Retrospective 1Document3 pagesMethods For Assessing The Stability of Slopes During Earthquakes-A Retrospective 1ilijarskNo ratings yet
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNo ratings yet
- Homa 2 CalculatorDocument6 pagesHoma 2 CalculatorAnonymous 4dE7mUCIH0% (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Solomons Organic Chemistry Solution Manual - Chapter 3Document12 pagesSolomons Organic Chemistry Solution Manual - Chapter 3Imanghh25% (4)
- Time Delay ControlDocument7 pagesTime Delay ControlGeet DeokateNo ratings yet
- Proceedings of the 2003 IAVSD conference analysis of active suspension systemsDocument10 pagesProceedings of the 2003 IAVSD conference analysis of active suspension systemsSohan RaoNo ratings yet
- Optimization Based Full Body Control For The Atlas RobotDocument8 pagesOptimization Based Full Body Control For The Atlas Robot曾龙No ratings yet
- Application of LQR Control Theory To The Design of Modified Skyhook Control Gains For MecanialDocument6 pagesApplication of LQR Control Theory To The Design of Modified Skyhook Control Gains For MecanialAlan SobalNo ratings yet
- A Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorDocument6 pagesA Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorwaweeNo ratings yet
- Adaptive Robust Control Methodology For Active Roll ControlDocument13 pagesAdaptive Robust Control Methodology For Active Roll ControlSantiago Puma Puma AraujoNo ratings yet
- Sliding Mode Controller For Different Road Profiles of Active Suspension System For Quarter-Car ModelDocument7 pagesSliding Mode Controller For Different Road Profiles of Active Suspension System For Quarter-Car Modeldream 11No ratings yet
- Nonlinear Robust Attitude Controller For A Satellite Launch Vehicle With Fuel Slosh DynamicsDocument7 pagesNonlinear Robust Attitude Controller For A Satellite Launch Vehicle With Fuel Slosh DynamicsGayathri GnanaiyaNo ratings yet
- Friction Compensation and Disturbance Observer Design for Precision Motion ControlDocument5 pagesFriction Compensation and Disturbance Observer Design for Precision Motion ControlaliNo ratings yet
- Design of Robust Power System Stabilizer Using Mixed Sensitivity Based H Output-Feedback Control in LMI FrameworkDocument6 pagesDesign of Robust Power System Stabilizer Using Mixed Sensitivity Based H Output-Feedback Control in LMI FrameworkFernando RamosNo ratings yet
- Non-Linear Adaptive Control System For An Underactuated Autonomous Underwater Vehicle Using Dynamic State FeedbackDocument5 pagesNon-Linear Adaptive Control System For An Underactuated Autonomous Underwater Vehicle Using Dynamic State FeedbackSidahmed LarbaouiNo ratings yet
- Presentation Paper On DGDocument5 pagesPresentation Paper On DGAlok Bikash SadangiNo ratings yet
- A Robust Output-Feedback Control For The Cart-Pole System: A Super-Twisting Sliding-Mode ApproachDocument6 pagesA Robust Output-Feedback Control For The Cart-Pole System: A Super-Twisting Sliding-Mode ApproachSamy Kharuf GutierrezNo ratings yet
- Interim ReportDocument10 pagesInterim ReportGhulam AbbasNo ratings yet
- 2015 Pitch-Controlled (1) IEEE PDFDocument6 pages2015 Pitch-Controlled (1) IEEE PDFShah MimNo ratings yet
- Disturbance Observer Control of Active SuspensionDocument4 pagesDisturbance Observer Control of Active SuspensionOussama SadkiNo ratings yet
- Convex Optimization For Spring Design in Series Elastic Actuators From Theory To PracticeDocument6 pagesConvex Optimization For Spring Design in Series Elastic Actuators From Theory To PracticeYuan HUANGNo ratings yet
- InTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersDocument22 pagesInTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersWalid AbidNo ratings yet
- Dynamic Analysis of Gear and Rack Transmission SysDocument6 pagesDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNo ratings yet
- Control de RetrocesoDocument6 pagesControl de RetrocesoFrank Dusk K DuskNo ratings yet
- Active Suspension System Based On Lyapunov Method and Ground-Hook Reference Model, Penulis A WimatraDocument5 pagesActive Suspension System Based On Lyapunov Method and Ground-Hook Reference Model, Penulis A WimatraayubNo ratings yet
- Performance Benefits in Passive Vehicle Suspensions Employing InertersDocument6 pagesPerformance Benefits in Passive Vehicle Suspensions Employing Inertersนิติพล ไชยวงศ์No ratings yet
- 2014 Innovative Approach To Design Truncated Mooring System Based On Static and Damping EquivalentDocument13 pages2014 Innovative Approach To Design Truncated Mooring System Based On Static and Damping EquivalentXinkuan YanNo ratings yet
- Sciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotDocument8 pagesSciendo: Nonlinear PD Plus Sliding Mode Control With Application To A Parallel Delta RobotĐức QuangNo ratings yet
- Discrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyDocument4 pagesDiscrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyElzan AgungNo ratings yet
- Multi-Stage PWM DC Servo Motor Control: SugiyamaDocument5 pagesMulti-Stage PWM DC Servo Motor Control: SugiyamaLandung AntoroNo ratings yet
- Solution To Industry Benchmark Problems With The Lattice-Boltzmann Code XFlowDocument22 pagesSolution To Industry Benchmark Problems With The Lattice-Boltzmann Code XFlowCFDiran.irNo ratings yet
- tmp90C2 TMPDocument8 pagestmp90C2 TMPFrontiersNo ratings yet
- Ying 2011 A PDFDocument6 pagesYing 2011 A PDFAngel CerriteñoNo ratings yet
- Dhuaa PDFDocument8 pagesDhuaa PDFAhmadMoaazNo ratings yet
- Active Suspension System For Heavy VehiclesDocument5 pagesActive Suspension System For Heavy VehiclesandersonNo ratings yet
- 10 23919@acc 2018 8430834Document6 pages10 23919@acc 2018 8430834mda mpsNo ratings yet
- An Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemDocument8 pagesAn Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemG. ANo ratings yet
- Sinus Oi Dal ProfileDocument4 pagesSinus Oi Dal ProfiletygusNo ratings yet
- Optimized Design of Stationary Frame Three Phase AC Current Regulators-2009Document10 pagesOptimized Design of Stationary Frame Three Phase AC Current Regulators-2009Jadyson SilvaNo ratings yet
- Averaging Level Control of Multiple Tanks: A Passivity Based ApproachDocument6 pagesAveraging Level Control of Multiple Tanks: A Passivity Based ApproachFelipe VasconcelosNo ratings yet
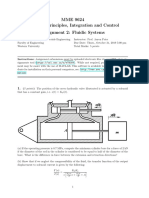
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 pagesMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelNo ratings yet
- Powers Ys 400Document6 pagesPowers Ys 400makroumNo ratings yet
- 192 New Reactive Power Optimization AlgorithmDocument6 pages192 New Reactive Power Optimization Algorithmlcm3766lNo ratings yet
- Carrillo AA547 FinalProjectDocument6 pagesCarrillo AA547 FinalProjectJames CarrilloNo ratings yet
- A Simple and Robust Speed Control Scheme of Permanent Magnet Synchronous MotorDocument4 pagesA Simple and Robust Speed Control Scheme of Permanent Magnet Synchronous Motoresh223No ratings yet
- Cost-Effective Skyhook ControlDocument9 pagesCost-Effective Skyhook Controlgloohuis463No ratings yet
- Vibration Control Using Semi-Active Force Generators: D. KarnoppDocument8 pagesVibration Control Using Semi-Active Force Generators: D. KarnoppDiabloNo ratings yet
- Slack Bus Selection To Minimize The System Power Imbalance in Load-Flow StudiesDocument9 pagesSlack Bus Selection To Minimize The System Power Imbalance in Load-Flow Studiesjaach78No ratings yet
- AIAA SDM 2015 Paper KierDocument13 pagesAIAA SDM 2015 Paper KierAnmar Hamid AliNo ratings yet
- I Jfs 2281328905800Document12 pagesI Jfs 2281328905800Tawhid Bin TarekNo ratings yet
- IET Power Electronics Research Article Presents Adaptive Sliding Mode Control MethodDocument10 pagesIET Power Electronics Research Article Presents Adaptive Sliding Mode Control MethodTran Cuong HungNo ratings yet
- Optimal Pole Shift Control in Application To A Hydro Power PlantDocument8 pagesOptimal Pole Shift Control in Application To A Hydro Power PlantPuttaraje GowdaNo ratings yet
- Small Stability SMIB ExampleDocument8 pagesSmall Stability SMIB ExampleJaol1976No ratings yet
- An Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangDocument5 pagesAn Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangPadmo PadmundonoNo ratings yet
- Generalpaper On Power Shift of Hydraulic ExcavatorDocument7 pagesGeneralpaper On Power Shift of Hydraulic ExcavatorShankar yadavNo ratings yet
- yang1991Document2 pagesyang1991dora guzmanNo ratings yet
- Friction Compensation for a Double Inverted Pendulum Using a Modified First-Order Dahl ModelDocument6 pagesFriction Compensation for a Double Inverted Pendulum Using a Modified First-Order Dahl Modelمحمد المهندسNo ratings yet
- Ijtpp 04 00008 PDFDocument18 pagesIjtpp 04 00008 PDFdanea haitham abd alrahmanNo ratings yet
- Nonlinear Structure-Preserving Network Reduction Using Holomorphic EmbeddingDocument10 pagesNonlinear Structure-Preserving Network Reduction Using Holomorphic EmbeddingmoraejNo ratings yet
- A State-Space Modeling of Non - IdealDocument8 pagesA State-Space Modeling of Non - IdealSathiya NathanNo ratings yet
- Optimization of Mass and Stiffness Distribution For Efficient Bipedal WalkingDocument6 pagesOptimization of Mass and Stiffness Distribution For Efficient Bipedal WalkingDaniel Sanz MerodioNo ratings yet
- Bifurcation Control of Nonlinear - SinhaDocument8 pagesBifurcation Control of Nonlinear - SinhaThiago CésarNo ratings yet
- Control of Chaos Via Extended Delay Feedback - PyragasDocument8 pagesControl of Chaos Via Extended Delay Feedback - PyragasThiago CésarNo ratings yet
- Dynamic and Closed Loop Control-PrincetonDocument40 pagesDynamic and Closed Loop Control-PrincetonThiago CésarNo ratings yet
- SPACECRAFTDocument11 pagesSPACECRAFTThiago CésarNo ratings yet
- Introducao As Telecomunicacoes MoveisDocument22 pagesIntroducao As Telecomunicacoes MoveisPedro Victor GomesNo ratings yet
- Modal Verbs ExplanationDocument1 pageModal Verbs ExplanationThiago CésarNo ratings yet
- Introduction to Aircraft Stability and Control Course NotesDocument153 pagesIntroduction to Aircraft Stability and Control Course NotesKhairul Nizam100% (1)
- VR Simple NewDocument8 pagesVR Simple NewThiago CésarNo ratings yet
- SSW-05 - Manual Do UsuárioDocument98 pagesSSW-05 - Manual Do Usuárioaleeecarvalho3795No ratings yet
- A04 Introduction To FEMDocument75 pagesA04 Introduction To FEMThiago CésarNo ratings yet
- Improving Students Understanding of QM - PhysToday - Vol59no8p43 - 49Document7 pagesImproving Students Understanding of QM - PhysToday - Vol59no8p43 - 49Thiago CésarNo ratings yet
- Universal Host Controller Interface (UHCI) Design GuideDocument47 pagesUniversal Host Controller Interface (UHCI) Design GuideXiang LiuNo ratings yet
- Salami Science-Are We Still Allowing ItDocument1 pageSalami Science-Are We Still Allowing ItrafafellNo ratings yet
- Constraints On The Universe As A Numerical SimulationDocument14 pagesConstraints On The Universe As A Numerical SimulationJonathan Robert Kraus (OutofMudProductions)No ratings yet
- Evans - The Root Locus PaperDocument7 pagesEvans - The Root Locus Paperpss196203No ratings yet
- Answer Key Grade 6 - 2023Document7 pagesAnswer Key Grade 6 - 2023ALKHANSAA ELOBEIDYNo ratings yet
- VCTDS 00543 enDocument62 pagesVCTDS 00543 enguido algaranazNo ratings yet
- Home Automation Iot Bca Up (2ND SEMINAR PPT) RTDocument30 pagesHome Automation Iot Bca Up (2ND SEMINAR PPT) RTTejaswiniNo ratings yet
- Huawei Mediapad m5 10.8inch Ръководство За Потребителя (Cmr-Al09, 01, Neu)Document6 pagesHuawei Mediapad m5 10.8inch Ръководство За Потребителя (Cmr-Al09, 01, Neu)Галина ЦеноваNo ratings yet
- Midterm Exam Result Ce199-1l 2Q1920Document3 pagesMidterm Exam Result Ce199-1l 2Q1920RA CarpioNo ratings yet
- Microstation V8I Accudraw Basics: Bentley Institute Course GuideDocument80 pagesMicrostation V8I Accudraw Basics: Bentley Institute Course Guideh_eijy2743No ratings yet
- Bill of Material: The Hanover CompanyDocument17 pagesBill of Material: The Hanover CompanyLIVIANo ratings yet
- Velocity profiles and incompressible flow field equationsDocument2 pagesVelocity profiles and incompressible flow field equationsAbdul ArifNo ratings yet
- MleplustutorialDocument13 pagesMleplustutorialvorge daoNo ratings yet
- VRV A 12 PDFDocument1 pageVRV A 12 PDFMoe Thiri ZunNo ratings yet
- ISO 8243 2013 Cigarettes - SamplingDocument18 pagesISO 8243 2013 Cigarettes - SamplingEko YuliantoNo ratings yet
- Power Cable Installation ManualDocument50 pagesPower Cable Installation ManualAnn DodsonNo ratings yet
- AMD OverDrive Utility 4.3.1.0698 Release NotesDocument1 pageAMD OverDrive Utility 4.3.1.0698 Release Notesbayu_gendeng666No ratings yet
- Ey-H3l Yh1576Document44 pagesEy-H3l Yh1576jorgeNo ratings yet
- MSYS-1 0 11-ChangesDocument3 pagesMSYS-1 0 11-ChangesCyril BerthelotNo ratings yet
- LC IN SCIENCE and MathDocument14 pagesLC IN SCIENCE and MathCharity Anne Camille PenalozaNo ratings yet
- MITRES 6 002S08 Chapter2Document87 pagesMITRES 6 002S08 Chapter2shalvinNo ratings yet
- Front Panel & Display Technical Data: User ManualDocument2 pagesFront Panel & Display Technical Data: User ManualJulio PorleyNo ratings yet
- Product Presentation Nova Blood Gas AnalyzerDocument38 pagesProduct Presentation Nova Blood Gas Analyzerlaboratorium rsdmadani100% (1)
- Canalis KDP-KBA-KBB-KNA-KSA-20-1000A-2014Document324 pagesCanalis KDP-KBA-KBB-KNA-KSA-20-1000A-2014Rubén González CabreraNo ratings yet
- MongoDB Replication Guide PDFDocument106 pagesMongoDB Replication Guide PDFDante LlimpeNo ratings yet
- TIM Fungsi 1Document40 pagesTIM Fungsi 1lilikNo ratings yet
- Simultaneous EquationsDocument11 pagesSimultaneous EquationsSaleena AurangzaibNo ratings yet