You might also like
- Service Manual Pat Ds350g-GwDocument3 pagesService Manual Pat Ds350g-Gwdeathh6584100% (1)
- Audi A3 8p Tableau Des MoteursDocument7 pagesAudi A3 8p Tableau Des Moteurssamir badriNo ratings yet
- Cas GestagDocument4 pagesCas Gestagsamir badriNo ratings yet
- Anglais 3Document18 pagesAnglais 3samir badriNo ratings yet
- Capteur LacetDocument4 pagesCapteur Lacettotoboss26No ratings yet
- vcds02112019 PDFDocument11 pagesvcds02112019 PDFsamir badriNo ratings yet
- Allumage Statique PDFDocument8 pagesAllumage Statique PDFnassimNo ratings yet
- Guide Technologie Automobile PDFDocument9 pagesGuide Technologie Automobile PDFFranck Adelin AppiaNo ratings yet
- Ross TechDocument53 pagesRoss TechYASSIXX27100% (1)
- Guide Technologie Automobile PDFDocument9 pagesGuide Technologie Automobile PDFFranck Adelin AppiaNo ratings yet
- Faisceau 2Document5 pagesFaisceau 2samir badriNo ratings yet
- 55NR 3Document5 pages55NR 3boutainaNo ratings yet
- Corrige Bac Pro Maintenance de Vehi2013 06-18-14!31!49Document6 pagesCorrige Bac Pro Maintenance de Vehi2013 06-18-14!31!49samir badriNo ratings yet
- Gamme de Guidance Regler Les OptiquesDocument3 pagesGamme de Guidance Regler Les Optiquessamir badriNo ratings yet
- Examen de Passage 2014 Ts Deea TheoriqueDocument5 pagesExamen de Passage 2014 Ts Deea Theoriquesamir badriNo ratings yet
- 8903 Ds VP 0617mrmDocument7 pages8903 Ds VP 0617mrmsamir badriNo ratings yet
- Le Moteur DieselDocument7 pagesLe Moteur DieselLibass Diop100% (1)
- Mux 1Document5 pagesMux 1samm_05No ratings yet
- Efm 06 de Diagnostic Et Electronique Embarquee TsdeeDocument3 pagesEfm 06 de Diagnostic Et Electronique Embarquee Tsdeesamir badriNo ratings yet
- Reg L PharesDocument4 pagesReg L Pharessamir badriNo ratings yet
- Pneu1 PDFDocument8 pagesPneu1 PDFsamir badriNo ratings yet
- Lacet en Virage PDFDocument12 pagesLacet en Virage PDFSalah MohammedNo ratings yet
- Cap Teur ClimDocument3 pagesCap Teur Climsamir badriNo ratings yet
- U52 2008 SujetDocument26 pagesU52 2008 Sujetsamir badriNo ratings yet
- Cap Teur ViloDocument2 pagesCap Teur Vilosamir badriNo ratings yet
- Guidage ArDocument8 pagesGuidage Arsamir badriNo ratings yet
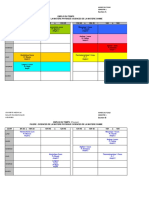
- Emplois Du Temps SA SMPC 2017 - 2018 - 0Document2 pagesEmplois Du Temps SA SMPC 2017 - 2018 - 0samir badriNo ratings yet
- CorrigeDocument19 pagesCorrigesamir badriNo ratings yet
- Antiroulis PDFDocument8 pagesAntiroulis PDFberjarryNo ratings yet
- Xsara 2 AbsDocument3 pagesXsara 2 Abssamir badriNo ratings yet
- Tpsimulink PDFDocument9 pagesTpsimulink PDFAmiraNo ratings yet
- Cours 20 - Alimentation Et Commande Des Machines À Courant Alternatif PDFDocument3 pagesCours 20 - Alimentation Et Commande Des Machines À Courant Alternatif PDFAwa Semou FayeNo ratings yet
- Filtre ActifDocument28 pagesFiltre ActifRawdhaNo ratings yet
- Deutz Dw275e FRDocument6 pagesDeutz Dw275e FRNedNo ratings yet
- Poste MT Compact Bas de PoteauDocument20 pagesPoste MT Compact Bas de PoteaupopaminoNo ratings yet
- TD 4Document4 pagesTD 4Mohammed BabaNo ratings yet
- Bus I2CDocument20 pagesBus I2CMERYEM ZOUBIRNo ratings yet
- Liste Ue MastereeaDocument2 pagesListe Ue Mastereeahit masterNo ratings yet
- Circuit Electrique & Magnétique (CEM) : CoursDocument361 pagesCircuit Electrique & Magnétique (CEM) : CoursBîlâl ChabiraNo ratings yet
- PloyDocument63 pagesPloyHAMID OUCHAGHOUINo ratings yet
- Table D Echange OCP Site 2Document17 pagesTable D Echange OCP Site 2soufiyane amrijNo ratings yet
- Cours Api Part 5 2022Document19 pagesCours Api Part 5 2022Nour ouzeriNo ratings yet
- Transfolegrand-La Protection Des Transformateurs Et de Leurs LignesDocument2 pagesTransfolegrand-La Protection Des Transformateurs Et de Leurs LignesbmmostefaNo ratings yet
- Document Formation Poste HT - MTDocument48 pagesDocument Formation Poste HT - MTSmirnov Artaéév100% (2)
- TD HacheurDocument2 pagesTD HacheurDjamel BenoudjitNo ratings yet
- ÉlectrotechniqueDocument11 pagesÉlectrotechniqueMazama-Esso Moddoh OclooNo ratings yet
- Traits Du Controle 2 PDFDocument5 pagesTraits Du Controle 2 PDFAlia TagraretNo ratings yet
- Serie1 1Document5 pagesSerie1 1Ilyas khadrouniNo ratings yet
- KLOUZAZNA Part025Document14 pagesKLOUZAZNA Part025klouzaznaNo ratings yet
- Cours Sur Les Codeurs Wa333ar PDFDocument9 pagesCours Sur Les Codeurs Wa333ar PDFtarikmlilasNo ratings yet
- Chap7 Circuits FET 2ppDocument9 pagesChap7 Circuits FET 2ppdjelbouNo ratings yet
- ArrosageDocument11 pagesArrosageRiad AnthonyNo ratings yet
- FeuDocument42 pagesFeublonkslagenNo ratings yet
- DP - Demarreur StatoriqueDocument5 pagesDP - Demarreur StatoriqueMohemed ElyefrahiNo ratings yet
- Tube LED 18W G13-BlancheDocument1 pageTube LED 18W G13-BlancheFame TechnologyNo ratings yet
- Snel RDCDocument23 pagesSnel RDCnkiewaNo ratings yet
- Projet de Centrale Photovoltaïque Au Sol: Résumé Non Technique de L'étude D'impact Sur L'environnementDocument53 pagesProjet de Centrale Photovoltaïque Au Sol: Résumé Non Technique de L'étude D'impact Sur L'environnementahmed aliNo ratings yet
- ZES-21-NC014B Variante 630mmDocument14 pagesZES-21-NC014B Variante 630mmEric AGBANGBATINNo ratings yet
- TP3-Etude Du Protocole EthernetDocument5 pagesTP3-Etude Du Protocole EthernetHaddouNo ratings yet