You might also like
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Solutions 4 For Oscillations and WavesDocument5 pagesSolutions 4 For Oscillations and WavesUmarNo ratings yet
- Minor2 SolDocument4 pagesMinor2 SolShane WatsonNo ratings yet
- Adobe Scan 02 Apr 2023Document7 pagesAdobe Scan 02 Apr 2023TEJAS.S.ARADHYA NAMAGONDLUNo ratings yet
- Rings and DiscsDocument14 pagesRings and DiscsEbeda BenardNo ratings yet
- Strauss PDEch 2 S 1 P 8Document3 pagesStrauss PDEch 2 S 1 P 8Pronoy MandalNo ratings yet
- Central Forces Tutorial ExercisesDocument7 pagesCentral Forces Tutorial ExercisesShweta SridharNo ratings yet
- Assignment 2Document6 pagesAssignment 2Kalpit AgarwalNo ratings yet
- Assignment 1, Solution: Dept. of Electrical & Electronic Engineering (EEE)Document3 pagesAssignment 1, Solution: Dept. of Electrical & Electronic Engineering (EEE)mahmudulNo ratings yet
- ElasticityPolars 04 BodyForcesRotatingDiscs PDFDocument5 pagesElasticityPolars 04 BodyForcesRotatingDiscs PDFMax HinojosaNo ratings yet
- Vector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Document5 pagesVector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Comical comicNo ratings yet
- M.M Tripathi Coordinate GeometryDocument85 pagesM.M Tripathi Coordinate GeometryDivya AgrawalNo ratings yet
- Lecture 23: Introduction To Valence Bond TheoryDocument18 pagesLecture 23: Introduction To Valence Bond TheoryElectro_LiteNo ratings yet
- Lessons 22-45Document179 pagesLessons 22-45Shakeel NawazNo ratings yet
- Error Analysis of Direct Methods of Matrix InversionDocument50 pagesError Analysis of Direct Methods of Matrix Inversionagbas20026896No ratings yet
- Resp 8Document1 pageResp 8Andre DuarteNo ratings yet
- Sol 100318Document11 pagesSol 100318Nitin Suyan PanchalNo ratings yet
- Tutorial PDFDocument50 pagesTutorial PDFvasudevan m.vNo ratings yet
- 4.2.1 Equilibrium Equations in Polar CoordinatesDocument6 pages4.2.1 Equilibrium Equations in Polar CoordinatesShgoyal0073_No ratings yet
- Name: Muhammad Usman Rollno.619 Semester:6 Subject: Quantum Mechanics DEPT: PhysicsDocument6 pagesName: Muhammad Usman Rollno.619 Semester:6 Subject: Quantum Mechanics DEPT: PhysicsMujtaba KhanNo ratings yet
- Allen: Final Jee-Main Examination - February, 2021Document4 pagesAllen: Final Jee-Main Examination - February, 2021ik62299No ratings yet
- Avril's Radiation Problem: P Qa ( X + I Y) e Ye YeDocument5 pagesAvril's Radiation Problem: P Qa ( X + I Y) e Ye YeBerenice MuruagaNo ratings yet
- Chapter 8 Series: Try These 8.1Document17 pagesChapter 8 Series: Try These 8.1EggBread12No ratings yet
- Ee324 Hw#6 Spring12Document11 pagesEe324 Hw#6 Spring12Jobayer AhamedNo ratings yet
- Mathematical Association of AmericaDocument9 pagesMathematical Association of AmericathonguyenNo ratings yet
- 02 6polar Coordinates 44-48Document4 pages02 6polar Coordinates 44-48eamcetmaterialsNo ratings yet
- Math 115 Lab 4 SolutionsDocument3 pagesMath 115 Lab 4 SolutionsDPNo ratings yet
- Homework 1Document1 pageHomework 1Ricardo ElizaldeNo ratings yet
- Charged Static Fluid SpheresDocument11 pagesCharged Static Fluid Spheresmasa24No ratings yet
- Eulerzig ZagDocument6 pagesEulerzig ZagLe Chanh Thanh TinNo ratings yet
- The Schrodinger Equation in Spherical CoordinatesDocument5 pagesThe Schrodinger Equation in Spherical CoordinatesRaga Pranathi TanduruNo ratings yet
- 30 580ln Fa08 PDFDocument14 pages30 580ln Fa08 PDFPedroNo ratings yet
- Assignment 4Document2 pagesAssignment 4Deepro SarkarNo ratings yet
- Jee Maths 11thDocument2 pagesJee Maths 11theplus ajmerNo ratings yet
- Allen: Final Jee-Main Examination - August, 2021Document3 pagesAllen: Final Jee-Main Examination - August, 2021K DHANALAKSHMI K DHANALAKSHMINo ratings yet
- MATH1009 Test 2 SolutionsDocument3 pagesMATH1009 Test 2 SolutionsfatdogeNo ratings yet
- MO Lecture Course-2 PDFDocument20 pagesMO Lecture Course-2 PDFaneeshssaNo ratings yet
- Calculus and Linear AlgebraDocument25 pagesCalculus and Linear AlgebraGamer YNo ratings yet
- HW 4 SolDocument5 pagesHW 4 SolAlexey VoroninNo ratings yet
- Gerretsen InequalityDocument6 pagesGerretsen InequalityMoti LevyNo ratings yet
- Assignment 3Document3 pagesAssignment 3SarthakNo ratings yet
- Sol 03Document7 pagesSol 03kirk putmanNo ratings yet
- Analytic Geometry in Calculus: Polar Coordinate ExercisesDocument45 pagesAnalytic Geometry in Calculus: Polar Coordinate ExercisescharlesbrachNo ratings yet
- Mock Test - 1Document3 pagesMock Test - 1kishangopi123No ratings yet
- Foot Atomic Solutions by Zhao, C.Document32 pagesFoot Atomic Solutions by Zhao, C.Jacob Francis94% (16)
- WKB Method for Solving Dirac EquationDocument6 pagesWKB Method for Solving Dirac EquationVdhieieNo ratings yet
- Trig formulas & PDE solutionsDocument2 pagesTrig formulas & PDE solutionsVasil GorgievNo ratings yet
- TS 1 - 105200Document2 pagesTS 1 - 105200KAPEMBWA MAPALONo ratings yet
- Space Flight QuizDocument2 pagesSpace Flight QuizbooksforfunNo ratings yet
- Solutions Fourier TransformsDocument16 pagesSolutions Fourier TransformsEduardo WatanabeNo ratings yet
- Aritmetic Progression Sum of The First N Terms: T T T S - SDocument40 pagesAritmetic Progression Sum of The First N Terms: T T T S - STANG PEI PEI100% (6)
- MA1001.uinit 4 1Document2 pagesMA1001.uinit 4 1Rɩsʜʌv SɩŋʛʜNo ratings yet
- MR - Santa Has To Decode A Number ABCDEF Where Each Alphabet Is Respersented by A Single Digit - Suppose An Orbital Whose RadialDocument1 pageMR - Santa Has To Decode A Number ABCDEF Where Each Alphabet Is Respersented by A Single Digit - Suppose An Orbital Whose RadialSanthosh KNo ratings yet
- SignalsDocument3 pagesSignalsBerentoNo ratings yet
- Polar Coordinate SystemsDocument8 pagesPolar Coordinate SystemsalfiaNo ratings yet
- MT410 EXAM 3 SAMPLE 1 SOLUTIONSDocument8 pagesMT410 EXAM 3 SAMPLE 1 SOLUTIONShendrik setyawanNo ratings yet
- Jee Advanced 2018 Top 10 Ranks Mathematics QuestionsDocument15 pagesJee Advanced 2018 Top 10 Ranks Mathematics QuestionschandraNo ratings yet
- Physics 725: Assignment 1: (To Be Submitted by Tuesday, September 20, 2016)Document3 pagesPhysics 725: Assignment 1: (To Be Submitted by Tuesday, September 20, 2016)Tuba SarwarNo ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Preterm Human Milk Composition A Systematic Literature ReviewDocument13 pagesPreterm Human Milk Composition A Systematic Literature ReviewpuhumightNo ratings yet
- MJIRI v19n4p319 enDocument4 pagesMJIRI v19n4p319 enpuhumightNo ratings yet
- Diagnosis On A Principle PDFDocument69 pagesDiagnosis On A Principle PDFpuhumightNo ratings yet
- Decision Support System For Fault Isolation of JAS 39 Gripen PDFDocument71 pagesDecision Support System For Fault Isolation of JAS 39 Gripen PDFpuhumightNo ratings yet
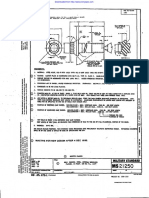
- MILITARY BOLT SPECIFICATIONDocument3 pagesMILITARY BOLT SPECIFICATIONRubén Darío Becerra GalindoNo ratings yet
- 211799Document12 pages211799puhumightNo ratings yet
- Foolishness Without Consequence? From Physical To Virtual Modeling in The History of Military Aircraft Development at SaabDocument19 pagesFoolishness Without Consequence? From Physical To Virtual Modeling in The History of Military Aircraft Development at SaabpuhumightNo ratings yet
- Titanium and Its Alloys: Metallurgy, Heat Treatment and Alloy CharacteristicsDocument13 pagesTitanium and Its Alloys: Metallurgy, Heat Treatment and Alloy CharacteristicsBruna GomesNo ratings yet
- Epilepsia - 2011 - Cendes - Vaccinations and Febrile SeizuresDocument3 pagesEpilepsia - 2011 - Cendes - Vaccinations and Febrile SeizurespuhumightNo ratings yet
- Distribution of Cooling To Avionics PDFDocument76 pagesDistribution of Cooling To Avionics PDFpuhumightNo ratings yet
- Diagnosis of The Air Distribution System of The JAS39 Gripen Environmental Control SystemDocument59 pagesDiagnosis of The Air Distribution System of The JAS39 Gripen Environmental Control SystempuhumightNo ratings yet
- Development of Integrated Functional Monitoring and Warnings System For Saab 39 GripenDocument7 pagesDevelopment of Integrated Functional Monitoring and Warnings System For Saab 39 GripenpuhumightNo ratings yet
- M-346 Flight Test ProgrammeDocument10 pagesM-346 Flight Test ProgrammecoralonsoNo ratings yet
- IAI - LAVI Fighter Evolution: Ovadia Harari Memorial LectureDocument1 pageIAI - LAVI Fighter Evolution: Ovadia Harari Memorial LecturepuhumightNo ratings yet
- Aermacchi M-346FA The Fighter AttackDocument12 pagesAermacchi M-346FA The Fighter AttackpuhumightNo ratings yet
- Moog AG M-346 Brochure Mar15Document4 pagesMoog AG M-346 Brochure Mar15puhumightNo ratings yet
- New Configurations For The Windshield and The Canopy For A Two-Seater Trainer Military AircraftDocument8 pagesNew Configurations For The Windshield and The Canopy For A Two-Seater Trainer Military AircraftpuhumightNo ratings yet
- M-346 Advanced Trainer's Early Test Flights Achieve MilestonesDocument12 pagesM-346 Advanced Trainer's Early Test Flights Achieve MilestonespuhumightNo ratings yet
- Concept Definition: A Historical Perspective: (Based On A-10 Systems Engineering Case Study)Document22 pagesConcept Definition: A Historical Perspective: (Based On A-10 Systems Engineering Case Study)puhumightNo ratings yet
- T-6A Texan II Systems Engineering Case StudyDocument88 pagesT-6A Texan II Systems Engineering Case StudypuhumightNo ratings yet
- Aeroelastic Test and ValidationDocument21 pagesAeroelastic Test and ValidationpuhumightNo ratings yet
- Air Force Institute of Technology: Improving The Upt Student Follow-On Assignment Selection ProcessDocument91 pagesAir Force Institute of Technology: Improving The Upt Student Follow-On Assignment Selection ProcesspuhumightNo ratings yet
- ftft-OIO-ifc?: An Investigation of F/A-l 8 AMAD Gearbox Driveshaft VibrationDocument101 pagesftft-OIO-ifc?: An Investigation of F/A-l 8 AMAD Gearbox Driveshaft VibrationpuhumightNo ratings yet
- Eads (Dasa) At-2000 MakoDocument8 pagesEads (Dasa) At-2000 MakopuhumightNo ratings yet
- Active content manual physics chapter measurementsDocument57 pagesActive content manual physics chapter measurementspuhumightNo ratings yet
- Quiz Sistemas de AeronavesDocument23 pagesQuiz Sistemas de AeronavesAllain CelyNo ratings yet
- F-22A Lightweight Gun System Comparison: NDIA Gun and Missile Systems Conference & ExhibitionDocument17 pagesF-22A Lightweight Gun System Comparison: NDIA Gun and Missile Systems Conference & ExhibitionpuhumightNo ratings yet
- Aircraft Active Flutter Suppression: State of The Art and Technology Maturation NeedsDocument41 pagesAircraft Active Flutter Suppression: State of The Art and Technology Maturation NeedspuhumightNo ratings yet
- Aerodynamic Model Tests of Exhaust Augmentors for F/A-18 EngineDocument29 pagesAerodynamic Model Tests of Exhaust Augmentors for F/A-18 EnginepuhumightNo ratings yet
- Active content manual physics chapter measurementsDocument57 pagesActive content manual physics chapter measurementspuhumightNo ratings yet
- Absorption of SO2 by Aqueous NaOH Solutions in The Presence of A SurfactantDocument7 pagesAbsorption of SO2 by Aqueous NaOH Solutions in The Presence of A Surfactantirumor13No ratings yet
- This Study Resource Was: Problem #1 A Sharp-Edge Orifice, 50 MMDocument6 pagesThis Study Resource Was: Problem #1 A Sharp-Edge Orifice, 50 MMJemuel FloresNo ratings yet
- Fire Protection Hydraulics and Water SupplyDocument594 pagesFire Protection Hydraulics and Water SupplyDikaRahayuWidiana100% (4)
- THD3602 Major Test 1 2023Document3 pagesTHD3602 Major Test 1 2023LeighNo ratings yet
- Performance Curve For 8 - FanDocument8 pagesPerformance Curve For 8 - FanTiago Karina ElisaNo ratings yet
- Blast Resistant Design of RC StructuresDocument5 pagesBlast Resistant Design of RC StructuresBalaji SrinivasanNo ratings yet
- Tensile Test AnalysisDocument10 pagesTensile Test AnalysisAkeju AyodeleNo ratings yet
- Numerical Modeling of Elasto - Viscoplastic Chaboche Constitutive Equations Using MSC - MarcDocument10 pagesNumerical Modeling of Elasto - Viscoplastic Chaboche Constitutive Equations Using MSC - MarcPcelica PcelićNo ratings yet
- Open Channel Prob SolDocument42 pagesOpen Channel Prob SolLee CastroNo ratings yet
- Properties of Air and Other GasesDocument52 pagesProperties of Air and Other GasesNereo SpenglerNo ratings yet
- Design of PurlinsDocument3 pagesDesign of PurlinsVishal VarshneyNo ratings yet
- Cooling Load Computations ExampleDocument14 pagesCooling Load Computations ExampleJustin PeaceNo ratings yet
- AVCO Orifice PlatesDocument3 pagesAVCO Orifice PlatestmharishNo ratings yet
- 13 Seat Belt Anchorage Analysis (ECER14)Document6 pages13 Seat Belt Anchorage Analysis (ECER14)JayDeep KhajureNo ratings yet
- Best Practice Guide Impulse Lines For Differential-Pressure FlowmetersDocument22 pagesBest Practice Guide Impulse Lines For Differential-Pressure FlowmetersamietkolteNo ratings yet
- Gas Processors Suppliers Association GPSA Eng (Bookos - Org) - 701-821!1!60!1!20Document20 pagesGas Processors Suppliers Association GPSA Eng (Bookos - Org) - 701-821!1!60!1!20Karen Vl100% (1)
- SADDLE SUPPORT DESIGNDocument6 pagesSADDLE SUPPORT DESIGNSISIR KR BARMAN0% (1)
- Perpab6-Spesifikasi AlatDocument38 pagesPerpab6-Spesifikasi AlatardiNo ratings yet
- Bit Mesra SyllabusDocument27 pagesBit Mesra SyllabusDrum SholtoNo ratings yet
- Apuntes TurbomaquinasDocument5 pagesApuntes TurbomaquinasTeodoro HernandezNo ratings yet
- Heat ConductionDocument25 pagesHeat ConductionAnonymous z4Fe39jNo ratings yet
- Compact Rooftop Heat Pump Technical SpecificationsDocument10 pagesCompact Rooftop Heat Pump Technical SpecificationsRonald MonzónNo ratings yet
- BitumenDocument8 pagesBitumenwanNo ratings yet
- FLR - Performance of A Tubular CondenserDocument12 pagesFLR - Performance of A Tubular CondenserNazario Emil LintagNo ratings yet
- A10VSO32Document72 pagesA10VSO32王涛No ratings yet
- CFS Report - (6) 550NF189-43Document2 pagesCFS Report - (6) 550NF189-43Muhammad AdnanNo ratings yet
- Beam Design ExcelDocument3 pagesBeam Design Excelprashanth palaniNo ratings yet
- SPE 106855 Phase Envelopes From Black-Oil Models: DefinitionsDocument9 pagesSPE 106855 Phase Envelopes From Black-Oil Models: DefinitionsEstefany Marcela DiazNo ratings yet
- 3 2 KeytermsDocument2 pages3 2 Keytermsapi-291995478No ratings yet
- Numerical Problem:: A Concrete Gravity Dam Has The Following DimensionsDocument13 pagesNumerical Problem:: A Concrete Gravity Dam Has The Following DimensionsMuhammad Umer Arshad100% (1)