You might also like
- Reglamento de Protección Ambiental para Las Actividades de Exploración MineraDocument2 pagesReglamento de Protección Ambiental para Las Actividades de Exploración MineraCristiam TrinidadNo ratings yet
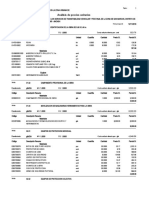
- Análisis de Precios Unitarios: Página: S10Document15 pagesAnálisis de Precios Unitarios: Página: S10Cristiam TrinidadNo ratings yet
- Problema IiDocument3 pagesProblema IiCristiam TrinidadNo ratings yet
- ANALISI ESTRUCCTURAL AsaeqDocument24 pagesANALISI ESTRUCCTURAL AsaeqCristiam TrinidadNo ratings yet
- Diseño de un adobe con poliestireno para viviendas en zonas ruralesDocument18 pagesDiseño de un adobe con poliestireno para viviendas en zonas ruralesCristiam TrinidadNo ratings yet
- Planeamiento y Control de ObrasDocument32 pagesPlaneamiento y Control de ObrasYoe BarretoNo ratings yet
- Conclusion 1Document1 pageConclusion 1Cristiam TrinidadNo ratings yet
- Fuentes de Agua y Propiedades Fisico Quimicas Del AguaDocument9 pagesFuentes de Agua y Propiedades Fisico Quimicas Del AguaCristiam TrinidadNo ratings yet
- Conclusion 1Document1 pageConclusion 1Cristiam TrinidadNo ratings yet
- CONCLUSIONDocument1 pageCONCLUSIONCristiam TrinidadNo ratings yet
- CONCLUSIONDocument1 pageCONCLUSIONCristiam TrinidadNo ratings yet
- ANALISI ESTRUCCTURAL AsaeqDocument24 pagesANALISI ESTRUCCTURAL AsaeqCristiam TrinidadNo ratings yet
- Construcciones IDocument11 pagesConstrucciones ICristiam TrinidadNo ratings yet
- HIDROLOGIA Clase6 PDFDocument67 pagesHIDROLOGIA Clase6 PDFJherson CashpaNo ratings yet
- Analisi Estrucctural IIDocument25 pagesAnalisi Estrucctural IICristiam TrinidadNo ratings yet
- Peralte en caminosDocument29 pagesPeralte en caminosCristiam TrinidadNo ratings yet
- Currículo de La Carrera Profesional de Ingeniería CivilDocument1 pageCurrículo de La Carrera Profesional de Ingeniería CivilCristiam TrinidadNo ratings yet
- Mate 4Document19 pagesMate 4Cristiam TrinidadNo ratings yet
- PavimentosDocument34 pagesPavimentosCristiam TrinidadNo ratings yet
- Construcciones IDocument2 pagesConstrucciones ICristiam TrinidadNo ratings yet
- Tipos de AeronavesDocument26 pagesTipos de AeronavesCristiam TrinidadNo ratings yet
- Mate 4Document26 pagesMate 4Cristiam TrinidadNo ratings yet
- Planilla de metrado arquitectura con menos deDocument102 pagesPlanilla de metrado arquitectura con menos deCristhian VillafrancoNo ratings yet
- Propiedades de Los FluidosDocument12 pagesPropiedades de Los FluidosCristiam TrinidadNo ratings yet
- Analisis Foda en Ingeneria CivilDocument1 pageAnalisis Foda en Ingeneria CivilCristiam TrinidadNo ratings yet
- Trabajo Expo PavimentosDocument21 pagesTrabajo Expo PavimentosCristiam TrinidadNo ratings yet
- Pavi MentosDocument2 pagesPavi MentosCristiam TrinidadNo ratings yet
- Trabajo Expo PavimentosDocument21 pagesTrabajo Expo PavimentosCristiam TrinidadNo ratings yet
- Construcciones IDocument11 pagesConstrucciones ICristiam TrinidadNo ratings yet
- Exposicion de Pavimentos 111Document32 pagesExposicion de Pavimentos 111Cristiam TrinidadNo ratings yet
- Calor específico y dilatación térmica de sólidosDocument6 pagesCalor específico y dilatación térmica de sólidosjean carlos Rhenls NavaroNo ratings yet
- Campo Magnético Fuerza Carga Protón Niobio SuperconductorDocument8 pagesCampo Magnético Fuerza Carga Protón Niobio SuperconductorpedroNo ratings yet
- Matriz de CalculosDocument26 pagesMatriz de CalculosPaola ArangoNo ratings yet
- Evaluación de Entrada - AnalisisDocument9 pagesEvaluación de Entrada - AnalisisJose50% (2)
- AL-RED ES 60HzDocument8 pagesAL-RED ES 60Hzorlando roncalNo ratings yet
- Análisis Estructural 1 2017-2 PDFDocument7 pagesAnálisis Estructural 1 2017-2 PDFMaison100% (1)
- Respuesta en alta frecuencia de un amplificador de audio de una sola etapaDocument5 pagesRespuesta en alta frecuencia de un amplificador de audio de una sola etapaJuan GtNo ratings yet
- Ciencias II. Fuerzas y movimientoDocument35 pagesCiencias II. Fuerzas y movimientoMìriam Alejandra Lázaro ChanNo ratings yet
- Resnick Fisica Vol1 Cap06Document37 pagesResnick Fisica Vol1 Cap06Alan Elizalde HernándezNo ratings yet
- Capitulo 11Document10 pagesCapitulo 11Wilo MixNo ratings yet
- GUÍA 6 Leyes de KirchhoffDocument6 pagesGUÍA 6 Leyes de KirchhoffLaisha Avendaño0% (1)
- Caída LibreDocument4 pagesCaída LibreCirculo Matematico IngenioNo ratings yet
- Control 4 FMDocument11 pagesControl 4 FMAxel Coronado PopperNo ratings yet
- Características Geométricas de Las SeccionesDocument5 pagesCaracterísticas Geométricas de Las SeccionesIndi CedeÑoNo ratings yet
- Simulación de cargas estructurales en ingenieríaDocument6 pagesSimulación de cargas estructurales en ingenieríaFidel CruzNo ratings yet
- Cap. 1 de Hidraulica de Canales UPIG TEMA IDocument40 pagesCap. 1 de Hidraulica de Canales UPIG TEMA IJozy Bravo DiazNo ratings yet
- Para La Primera PCDocument2 pagesPara La Primera PCIRVIN IRVINNo ratings yet
- Repuesta de MateDocument5 pagesRepuesta de MateGabriela Morel PlazaNo ratings yet
- ColumnasDocument20 pagesColumnasAnaNo ratings yet
- Primer Trabajo Analisis Estructural IDocument37 pagesPrimer Trabajo Analisis Estructural IJemuel Bosset MüellNo ratings yet
- Formulario VibracionesDocument5 pagesFormulario VibracionesBrian Nuñez AntequeraNo ratings yet
- BW 211 D-40 BW 211 PD-40: DimensionesDocument2 pagesBW 211 D-40 BW 211 PD-40: DimensionesCarlosSilvaYruretaNo ratings yet
- Ejemplo Portico PDFDocument10 pagesEjemplo Portico PDFMirogu66No ratings yet
- FisicaDocument4 pagesFisicafrankNo ratings yet
- Problema 1Document15 pagesProblema 1Nano2506No ratings yet
- Trabajo 3 Ejercicios Resueltos Del LibroDocument28 pagesTrabajo 3 Ejercicios Resueltos Del LibroAndres PesillosNo ratings yet
- Guía Del Ensayo de TracciónDocument8 pagesGuía Del Ensayo de TracciónKelvin ToasaNo ratings yet
- 7645guía02 2C23Document4 pages7645guía02 2C23lautaro razzettiNo ratings yet
- Reporte 2 Punto de Ebullicion y FusionDocument23 pagesReporte 2 Punto de Ebullicion y FusionLuis JerezNo ratings yet
- Transferencia de Calor Por Convección (Continuacion 1)Document43 pagesTransferencia de Calor Por Convección (Continuacion 1)Daniel CastilloNo ratings yet