You might also like
- Assessing The Challenges of Hospitality and Tourism IndustryDocument52 pagesAssessing The Challenges of Hospitality and Tourism IndustryHemant Maheshwari100% (4)
- Engineering - Metalworking - Lathe - Turning II - EITB Instruction ManualDocument100 pagesEngineering - Metalworking - Lathe - Turning II - EITB Instruction ManualtherobroyNo ratings yet
- Horizontal "Flatbed" Router Table: MLCS Manual For #9767Document11 pagesHorizontal "Flatbed" Router Table: MLCS Manual For #9767teromandosNo ratings yet
- Atlas Mill AccessoriesDocument1 pageAtlas Mill AccessoriesGary RepeshNo ratings yet
- Slotting MachineDocument32 pagesSlotting Machinesanaashraf91% (11)
- Operating: Maintenance ManualDocument18 pagesOperating: Maintenance ManualAnonymous reYe6iCCNo ratings yet
- The Principles of Pulp Washing - PdfaDocument9 pagesThe Principles of Pulp Washing - Pdfashabi049No ratings yet
- Komatsu PC200LC-6Document12 pagesKomatsu PC200LC-6Collin Corp100% (2)
- Databook Continental Agri 2006 PDFDocument0 pagesDatabook Continental Agri 2006 PDFdanilo3073No ratings yet
- Guidance On Mooring System Management Plans (MSMP)Document39 pagesGuidance On Mooring System Management Plans (MSMP)PJ Apostol Alpacas100% (4)
- Viscoelastic Modeling of Flexible Pavement With Abaqus PDFDocument143 pagesViscoelastic Modeling of Flexible Pavement With Abaqus PDFcabrel TokamNo ratings yet
- Thermo FormingDocument13 pagesThermo FormingCatherine ChongNo ratings yet
- King Heiple Sharp JigDocument1 pageKing Heiple Sharp JigEricsNo ratings yet
- Tent Pitching NotesDocument21 pagesTent Pitching NotessnguidemynahNo ratings yet
- Late Summer 2014Document24 pagesLate Summer 2014flanker_13No ratings yet
- Bicycle FreewheelDocument13 pagesBicycle Freewheeltransinov100% (1)
- Shaper Used As Surface GrinderDocument1 pageShaper Used As Surface Grinderradio-chaserNo ratings yet
- Build A Scale To Weigh Bee HivesDocument8 pagesBuild A Scale To Weigh Bee HivesPopescuAlexandruIonNo ratings yet
- 47158Document16 pages47158Rosania SanchesNo ratings yet
- Grinding 1g-1 Farrel Sellers Instruction Manual-1-7Document7 pagesGrinding 1g-1 Farrel Sellers Instruction Manual-1-7millimetNo ratings yet
- AVHC Quick StartDocument58 pagesAVHC Quick StartAndres Jose Amato TorresNo ratings yet
- Grindingmachiner00guesrich PDFDocument472 pagesGrindingmachiner00guesrich PDFtm100% (1)
- Lathebeddesign00hornrich PDFDocument56 pagesLathebeddesign00hornrich PDFLatika KashyapNo ratings yet
- Don't Be A Cart-Aleck: Materials: ToolsDocument5 pagesDon't Be A Cart-Aleck: Materials: ToolsKeith WesleyNo ratings yet
- Christopher Jobson Clock RestorerDocument2 pagesChristopher Jobson Clock RestorerTommy JobsonNo ratings yet
- Drilling Boring Reaming and TappingDocument24 pagesDrilling Boring Reaming and TappingPuneeth KumarNo ratings yet
- Engineering Vol 69 1900-03-16Document30 pagesEngineering Vol 69 1900-03-16ian_newNo ratings yet
- Low Cost Hobby Servo XY TableDocument16 pagesLow Cost Hobby Servo XY TableJBarreto2No ratings yet
- Engineering Vol 56 1893-12-15Document33 pagesEngineering Vol 56 1893-12-15ian_newNo ratings yet
- SherlineDocument48 pagesSherlinejairomarcanoNo ratings yet
- Louis Belet Cutting Tools Watchmaking Jura Suisse Vendlincourt Switzerland Brochure Hob Cutters enDocument16 pagesLouis Belet Cutting Tools Watchmaking Jura Suisse Vendlincourt Switzerland Brochure Hob Cutters enLogan RaoNo ratings yet
- Machinists Tools by Williams 1944Document32 pagesMachinists Tools by Williams 1944OSEAS GOMEZNo ratings yet
- WErbsen CourseworkDocument562 pagesWErbsen CourseworkRoberto Alexis Rodríguez TorresNo ratings yet
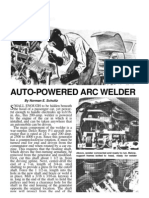
- Auto-Powered Arc Welder: by Norman E. SchuttzDocument60 pagesAuto-Powered Arc Welder: by Norman E. SchuttzPierre799es100% (1)
- Sherline Lathe Manual PDFDocument48 pagesSherline Lathe Manual PDFglenn toberNo ratings yet
- Catalogo HerramientasDocument285 pagesCatalogo HerramientasJuan Miguel RobledoNo ratings yet
- Cowells Manuals PDFDocument16 pagesCowells Manuals PDFpedjaNo ratings yet
- US CAT Niagara Cutter Catalog GT17-136Document342 pagesUS CAT Niagara Cutter Catalog GT17-136MANUEL VICTORNo ratings yet
- Metal SpinningDocument4 pagesMetal SpinningfranklynNo ratings yet
- A Few Project Images: Tool Posts Lathe Cutting ToolsDocument4 pagesA Few Project Images: Tool Posts Lathe Cutting ToolsAnonymous mKdAfWifNo ratings yet
- 1904-Instruments For Forest Work-NeDocument33 pages1904-Instruments For Forest Work-NespaytNo ratings yet
- Eureka Electric ClockDocument21 pagesEureka Electric ClockFrancescoBuccaNo ratings yet
- Boring Bars PDFDocument44 pagesBoring Bars PDFmnamkyNo ratings yet
- Let's Build A Can Stirling Engine Step 1 - Material Preparation and StructureDocument6 pagesLet's Build A Can Stirling Engine Step 1 - Material Preparation and Structureulises sosaNo ratings yet
- A D2wwwgaescription of A Clepsydra or Water-Clock (1753)Document14 pagesA D2wwwgaescription of A Clepsydra or Water-Clock (1753)Fernando PereyraNo ratings yet
- 149-Workshop Hints & TipsDocument1 page149-Workshop Hints & TipssyllavethyjimNo ratings yet
- AssemblyInstructions Fabscan PDFDocument22 pagesAssemblyInstructions Fabscan PDFjoumor100% (1)
- Ironworker E600C Dec2019Document40 pagesIronworker E600C Dec2019italotma100% (1)
- Barco: Tools CatalogDocument30 pagesBarco: Tools Catalogeternal_harpyNo ratings yet
- SICS ... : Basic Gear DesignDocument9 pagesSICS ... : Basic Gear DesignadamtuongNo ratings yet
- The Mästermyr Chest FindDocument8 pagesThe Mästermyr Chest FindJames Robertson100% (1)
- X Axis Plate Front: DIY Modular CNC v2 Plates BDocument5 pagesX Axis Plate Front: DIY Modular CNC v2 Plates BDani HpNo ratings yet
- Sunlu s2 ManualDocument9 pagesSunlu s2 ManualDan HendersonNo ratings yet
- PDFDocument44 pagesPDFBaSzarNo ratings yet
- Center Punch Grinding JigDocument2 pagesCenter Punch Grinding JigmododanNo ratings yet
- Dapra Biax Article Art of ScrapingDocument2 pagesDapra Biax Article Art of ScrapingPedro Ernesto SilvaNo ratings yet
- QcadCAM Tutorial enDocument12 pagesQcadCAM Tutorial enartisanicviewNo ratings yet
- Keep Your Lathe CleanDocument16 pagesKeep Your Lathe Cleangato7777777No ratings yet
- Fish Mouth Jig For The LatheDocument5 pagesFish Mouth Jig For The Latheradio-chaserNo ratings yet
- Home Made Wooden TripodsDocument7 pagesHome Made Wooden Tripodskorki777No ratings yet
- Knurling Grooving and Form TurningDocument33 pagesKnurling Grooving and Form TurningTareef Hash100% (1)
- Injection Mould Ies College of TechnologyDocument2 pagesInjection Mould Ies College of TechnologyHemant MaheshwariNo ratings yet
- Thesis FinalDocument1 pageThesis FinalHemant MaheshwariNo ratings yet
- Fault Detection Analysis of MPPT Using FLC Controllers in Solar PV SystemDocument1 pageFault Detection Analysis of MPPT Using FLC Controllers in Solar PV SystemHemant MaheshwariNo ratings yet
- SALE Trainee Ci HyundiDocument42 pagesSALE Trainee Ci HyundiHemant MaheshwariNo ratings yet
- Rainwater Harvesting Final Major ProjectDocument50 pagesRainwater Harvesting Final Major ProjectHemant Maheshwari100% (1)
- Acknowledgement: Low Cost HousingDocument23 pagesAcknowledgement: Low Cost HousingHemant MaheshwariNo ratings yet
- Water Treatment Plant Data EeeDocument52 pagesWater Treatment Plant Data EeeHemant MaheshwariNo ratings yet
- Report of Digtial AwarenessDocument2 pagesReport of Digtial AwarenessHemant MaheshwariNo ratings yet
- Server ReportsDocument1 pageServer ReportsHemant MaheshwariNo ratings yet
- Concrete BridgeDocument35 pagesConcrete BridgeHemant Maheshwari0% (1)
- Earthquake Resistant Building Construction by "Base Isolation Method"Document5 pagesEarthquake Resistant Building Construction by "Base Isolation Method"Hemant MaheshwariNo ratings yet
- Green Building UpdateDocument64 pagesGreen Building UpdateHemant MaheshwariNo ratings yet
- Major ProjectDocument5 pagesMajor ProjectHemant Maheshwari100% (1)
- Ii.7.2 Alat Kedokteran 2 PDFDocument153 pagesIi.7.2 Alat Kedokteran 2 PDFAguesBudi S TalawangNo ratings yet
- StoichiotryDocument57 pagesStoichiotryJezriel Theana SisonNo ratings yet
- Technical Delivery Condition of S500MCDocument4 pagesTechnical Delivery Condition of S500MCdcevipin100% (1)
- Material Turbina A GásDocument47 pagesMaterial Turbina A GásGetúlio RibeiroNo ratings yet
- LGP4247L-12LPB-3P Eay62608902 PLDF-L103B Psu SM PDFDocument74 pagesLGP4247L-12LPB-3P Eay62608902 PLDF-L103B Psu SM PDF00dark100% (1)
- Modelsim TutorialDocument26 pagesModelsim Tutorialsachinshetty001No ratings yet
- Sony FDR AX1 - E ProDocument68 pagesSony FDR AX1 - E ProTodorNo ratings yet
- Ammendement No.1 - List of Approved VendorsDocument3 pagesAmmendement No.1 - List of Approved VendorsLakhwant Singh KhalsaNo ratings yet
- Finals DSP WithMinimalErrors PDFDocument64 pagesFinals DSP WithMinimalErrors PDFanembam putobungbongNo ratings yet
- Design and Development of Vibratory Cockles Grading MachineDocument23 pagesDesign and Development of Vibratory Cockles Grading MachinehalizaNo ratings yet
- Reference Frame Theory PDFDocument42 pagesReference Frame Theory PDFSubaragavanNo ratings yet
- Trouble Shooting Dewatering PumpDocument136 pagesTrouble Shooting Dewatering PumpMuhammad NoorNo ratings yet
- Appendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1Document3 pagesAppendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1gonzalesNo ratings yet
- Vibration Diagnosis and CorrectionDocument54 pagesVibration Diagnosis and Correctionbhanuka2009No ratings yet
- Work, Kinetic Energy and Potential EnergyDocument28 pagesWork, Kinetic Energy and Potential EnergyMaey AkimNo ratings yet
- Rental Power 70 KW: Specification SheetDocument4 pagesRental Power 70 KW: Specification SheetDulguunkherlen BudkhandNo ratings yet
- UNIT - 1 (Data Structure Using C/C++) .: Definition of AlgorithmDocument2 pagesUNIT - 1 (Data Structure Using C/C++) .: Definition of AlgorithmArjun BhargavaNo ratings yet
- Hoshin Policy Deployment TemplatesDocument8 pagesHoshin Policy Deployment Templatesjcruz909No ratings yet
- Table 1. Data Set and CalculationDocument5 pagesTable 1. Data Set and CalculationliliNo ratings yet
- SEC StdsDocument65 pagesSEC Stdserson1981No ratings yet
- 90205-1031DEB F Series MaintenanceInspectionDocument31 pages90205-1031DEB F Series MaintenanceInspectionIsaac CarmonaNo ratings yet
- TXL 025 12s Datasheet 1 en PDFDocument11 pagesTXL 025 12s Datasheet 1 en PDFJulianCitoNo ratings yet
- PRO-II Thermodynamic Model SelectionDocument79 pagesPRO-II Thermodynamic Model Selectionchemsac2100% (1)
- Crow Proximity Reader ManualDocument8 pagesCrow Proximity Reader ManualMichael GiannakNo ratings yet
- Building A Model Steam Engine From Scratch Chapter 1, 150 121Document19 pagesBuilding A Model Steam Engine From Scratch Chapter 1, 150 121Liam Clink100% (2)