You might also like
- Feynman Lectures Simplified 2B: Magnetism & ElectrodynamicsFrom EverandFeynman Lectures Simplified 2B: Magnetism & ElectrodynamicsNo ratings yet
- Moving Charges & Magnetism CH4 Part 1Document26 pagesMoving Charges & Magnetism CH4 Part 1Rishab SharmaNo ratings yet
- Motion of A Charged Particle in Electric and Magnetic FieldsDocument9 pagesMotion of A Charged Particle in Electric and Magnetic FieldsAnonymous nwAob4No ratings yet
- E Content Class Xii Physics Chapter 4 Moving Charges & Magnetism M-1Document13 pagesE Content Class Xii Physics Chapter 4 Moving Charges & Magnetism M-1hpratap819No ratings yet
- Modern PhysicsDocument73 pagesModern PhysicsRodney Takundanashe MandizvidzaNo ratings yet
- Emi and Mag EffectDocument32 pagesEmi and Mag EffectKarthi KumarNo ratings yet
- Magnetic FieldsDocument48 pagesMagnetic Fieldsdayana hanis hassanNo ratings yet
- SJPO 2017 General Round - Answer GuideDocument16 pagesSJPO 2017 General Round - Answer GuideDivyaNo ratings yet
- Special Theory of Relativity: Electrodynamics and Michelson-Morley ExperimentDocument6 pagesSpecial Theory of Relativity: Electrodynamics and Michelson-Morley ExperimentAyorinde T TundeNo ratings yet
- Magnetic Force and Cyclotron Particle AcceleratorDocument11 pagesMagnetic Force and Cyclotron Particle AcceleratorRajnish KumarNo ratings yet
- Ruth v. Buckley (Auth.) - Electromagnetic Fields - Theory, Worked Examples and Problems-Macmillan Education UK (1981)Document169 pagesRuth v. Buckley (Auth.) - Electromagnetic Fields - Theory, Worked Examples and Problems-Macmillan Education UK (1981)Fabiana SinghNo ratings yet
- Moving Charge MagnetismDocument23 pagesMoving Charge Magnetismtamana99bNo ratings yet
- Moving Charges & Magnetism Boards Corner NotesDocument25 pagesMoving Charges & Magnetism Boards Corner NotesDevarsh VachhaniNo ratings yet
- Magnetic Force L2Document26 pagesMagnetic Force L2jovial golaNo ratings yet
- Grade Xii Book IIDocument137 pagesGrade Xii Book IIEdwinNo ratings yet
- NotesDocument30 pagesNotesYash PatelNo ratings yet
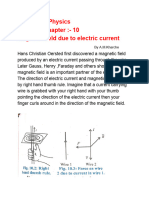
- Due To Electric Current Important Points by A.M.KharcheDocument43 pagesDue To Electric Current Important Points by A.M.KharcheZainNo ratings yet
- Kinetic of Particle: Impulse & Momentum: MR Abdul Azim Abdullah KNS1633 Engineering Mechanics Civil Engineering, UNIMASDocument54 pagesKinetic of Particle: Impulse & Momentum: MR Abdul Azim Abdullah KNS1633 Engineering Mechanics Civil Engineering, UNIMASSek Chin JiNo ratings yet
- Cyclotron Particle AcceleratorDocument9 pagesCyclotron Particle AcceleratorM ABDULLAHNo ratings yet
- Chap04 PDFDocument32 pagesChap04 PDFSehrelilNo ratings yet
- Lecture 10 Simple Harmonic MotionDocument60 pagesLecture 10 Simple Harmonic MotionHashir AwanNo ratings yet
- Engineering Physics - ICEEMDocument130 pagesEngineering Physics - ICEEMPrasanta GhoshNo ratings yet
- Particle Physics (Physics Factsheet)Document27 pagesParticle Physics (Physics Factsheet)Utsav Dhakal83% (6)
- 12.E - Electromagnetism (Exercises) - Physics LibreTextsDocument9 pages12.E - Electromagnetism (Exercises) - Physics LibreTextsJeff GanterNo ratings yet
- Theoretical Problems Problem 1Document16 pagesTheoretical Problems Problem 1chatuusumitavaNo ratings yet
- Semiconductors Chapter 4Document25 pagesSemiconductors Chapter 4SmoguherNo ratings yet
- CPH O2022 EnglishDocument16 pagesCPH O2022 EnglishHieu Phung Cong100% (2)
- Chapter 4 - Single Particle Motions in Magnetic FieldsDocument32 pagesChapter 4 - Single Particle Motions in Magnetic FieldsDebopam DattaNo ratings yet
- Magnetic Forces and Fields: (Chapter 12)Document48 pagesMagnetic Forces and Fields: (Chapter 12)Allan Gabriel LariosaNo ratings yet
- PHYS4 SpecialRelativityDocument19 pagesPHYS4 SpecialRelativitySeaton HarnsNo ratings yet
- Electron PhysicsDocument8 pagesElectron PhysicsMaryam KiyaniNo ratings yet
- Relativistic cyclotron motion in polarized electric fieldsDocument5 pagesRelativistic cyclotron motion in polarized electric fieldsceceNo ratings yet
- Midterm 02 Review QuestionsDocument9 pagesMidterm 02 Review QuestionsJudith EllisNo ratings yet
- Lecture 7 - Rapidity and PseudorapidityDocument8 pagesLecture 7 - Rapidity and PseudorapidityDEEPARNA BHATTACHARYYANo ratings yet
- Electromagnetism - I - Electric FieldDocument6 pagesElectromagnetism - I - Electric FieldJeffrey ChanNo ratings yet
- Motion of Charged Particles in Electric and Magnetic FieldsxDocument33 pagesMotion of Charged Particles in Electric and Magnetic FieldsxRam Krishna100% (1)
- Aberration of Electric Field and AccelerDocument7 pagesAberration of Electric Field and AccelerLuis PalaciosNo ratings yet
- Analogue Electronics 1.2Document22 pagesAnalogue Electronics 1.2trueNo ratings yet
- Waves ExplainedDocument4 pagesWaves ExplainedMuhammad SobanNo ratings yet
- Lec 7 - MomentumDocument17 pagesLec 7 - MomentumRichster LofrancoNo ratings yet
- PHS 211 - Central Force and Relativity ConceptsDocument24 pagesPHS 211 - Central Force and Relativity ConceptsRidwan BadmusNo ratings yet
- Ch-04 Moving Charges and Magnetism: Daily Practice Problem 04Document3 pagesCh-04 Moving Charges and Magnetism: Daily Practice Problem 04Gurnaj Singh MannNo ratings yet
- Magnetism Apni Kaksha NS SirDocument78 pagesMagnetism Apni Kaksha NS SirTiger DograNo ratings yet
- Relativistic Electrodynamics TheoryDocument10 pagesRelativistic Electrodynamics Theorymatei cristianNo ratings yet
- Relativistic Electrodynamics PDFDocument10 pagesRelativistic Electrodynamics PDFMizanur RahmanNo ratings yet
- Carrier Drift: Our EdiaDocument17 pagesCarrier Drift: Our EdiaDhivakar RadhakrishnanNo ratings yet
- Magnetic FieldDocument7 pagesMagnetic FieldNishantYadavNo ratings yet
- Phy CHP 4 NotesDocument30 pagesPhy CHP 4 Notesayaan ahmedNo ratings yet
- Chapter 5Document9 pagesChapter 5Keith Alfred GargarNo ratings yet
- Single Particle Motion in E and B Fields: 1 ReviewDocument6 pagesSingle Particle Motion in E and B Fields: 1 ReviewLucas Mosimanegape GaileleNo ratings yet
- Unit 6Document10 pagesUnit 6Zelalem LemmaNo ratings yet
- 226bset2 2023Document2 pages226bset2 2023Aditya ShankarNo ratings yet
- Chapter Four NOTES1 2021syllabusDocument33 pagesChapter Four NOTES1 2021syllabusGopika GNo ratings yet
- An Alternative Electrodynamics To The TH PDFDocument8 pagesAn Alternative Electrodynamics To The TH PDFEstimoNo ratings yet
- MIT6 013S09 Chap05Document25 pagesMIT6 013S09 Chap05Jasmien HassanienNo ratings yet
- Effective MassDocument4 pagesEffective Massagnirailways100% (3)
- Hall Effect PDFDocument11 pagesHall Effect PDFArum WulandariNo ratings yet
- Wopho Problems PDFDocument17 pagesWopho Problems PDFIonel ChiosaNo ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- (NAAC - 'A' Accredited University) (Examination Form) : Permanent Address Details: Correspondence Address DetailsDocument2 pages(NAAC - 'A' Accredited University) (Examination Form) : Permanent Address Details: Correspondence Address DetailsDinesh KatochNo ratings yet
- HPSSSBDocument2 pagesHPSSSBDinesh KatochNo ratings yet
- Topic Wise Test-1 Crystal-Structure (Question)Document4 pagesTopic Wise Test-1 Crystal-Structure (Question)Dinesh KatochNo ratings yet
- Press Note Regarding Screening Test For The Post of SrScale StenographerDocument1 pagePress Note Regarding Screening Test For The Post of SrScale StenographerDinesh KatochNo ratings yet
- HPSSC declares result for 13 Police Sub-Inspector postsDocument2 pagesHPSSC declares result for 13 Police Sub-Inspector postsRahul JanjuhaNo ratings yet
- Application Absentia PDFDocument1 pageApplication Absentia PDFDinesh KatochNo ratings yet
- TheHindu-04 Sep 2021Document16 pagesTheHindu-04 Sep 2021Dinesh KatochNo ratings yet
- Syym AsymmDocument3 pagesSyym AsymmjestamilNo ratings yet
- Press Note - Regarding Result of Main Written Examination of HP Subordinate Allied Services-2019 - 2021-09-05T070852.903Document3 pagesPress Note - Regarding Result of Main Written Examination of HP Subordinate Allied Services-2019 - 2021-09-05T070852.903Dinesh KatochNo ratings yet
- Application Absentia PDFDocument1 pageApplication Absentia PDFDinesh KatochNo ratings yet
- Physics III-November, 2018 ResultDocument8 pagesPhysics III-November, 2018 ResultDinesh KatochNo ratings yet
- HPSSC declares result for 13 Police Sub-Inspector postsDocument2 pagesHPSSC declares result for 13 Police Sub-Inspector postsRahul JanjuhaNo ratings yet
- 10 Design of CasingDocument1 page10 Design of CasingDinesh KatochNo ratings yet
- R&P TGTDocument23 pagesR&P TGTManish KaliaNo ratings yet
- Application Consolidated PDFDocument1 pageApplication Consolidated PDFDinesh KatochNo ratings yet
- Application Consolidated PDFDocument1 pageApplication Consolidated PDFDinesh KatochNo ratings yet
- Flowers - PDF - Google SearchDocument3 pagesFlowers - PDF - Google SearchDinesh KatochNo ratings yet
- Proposal Report For CentrifugeDocument3 pagesProposal Report For CentrifugeDinesh KatochNo ratings yet
- Spatial & Temporal Coherence: Optical EngineeringDocument15 pagesSpatial & Temporal Coherence: Optical EngineeringDinesh Katoch100% (1)
- 401 05flowersDocument26 pages401 05flowersDicky Chandra SuryaNo ratings yet
- Form PDFDocument1 pageForm PDFDinesh KatochNo ratings yet
- HPSCC Typing Skill Test for Clerk LDR PostsDocument1 pageHPSCC Typing Skill Test for Clerk LDR PostsDinesh KatochNo ratings yet
- 401 05flowersDocument26 pages401 05flowersDicky Chandra SuryaNo ratings yet
- Payment Recipt PDFDocument3 pagesPayment Recipt PDFDinesh KatochNo ratings yet
- Hall TicketDocument1 pageHall TicketDinesh KatochNo ratings yet
- Physics M.SC PDFDocument81 pagesPhysics M.SC PDFDinesh KatochNo ratings yet
- 2014-9-Answer Key For The Post of Lecturer Applied Sciences and Humanities (Polytechnic) - Physics Held On 12 09 2014Document1 page2014-9-Answer Key For The Post of Lecturer Applied Sciences and Humanities (Polytechnic) - Physics Held On 12 09 2014Dinesh KatochNo ratings yet
- Freecharge PDFDocument1 pageFreecharge PDFDinesh KatochNo ratings yet
- Freecharge PDFDocument1 pageFreecharge PDFDinesh KatochNo ratings yet
- UAPPDocument91 pagesUAPPMassimiliano de StellaNo ratings yet
- Quantification of Dell S Competitive AdvantageDocument3 pagesQuantification of Dell S Competitive AdvantageSandeep Yadav50% (2)
- 17BCE0552 Java DA1 PDFDocument10 pages17BCE0552 Java DA1 PDFABHIMAYU JENANo ratings yet
- Prof Ram Charan Awards Brochure2020 PDFDocument5 pagesProf Ram Charan Awards Brochure2020 PDFSubindu HalderNo ratings yet
- 10 1 1 124 9636 PDFDocument11 pages10 1 1 124 9636 PDFBrian FreemanNo ratings yet
- Biology Mapping GuideDocument28 pagesBiology Mapping GuideGazar100% (1)
- 2014 mlc703 AssignmentDocument6 pages2014 mlc703 AssignmentToral ShahNo ratings yet
- Impact of IT On LIS & Changing Role of LibrarianDocument15 pagesImpact of IT On LIS & Changing Role of LibrarianshantashriNo ratings yet
- Important Instructions To Examiners:: Calculate The Number of Address Lines Required To Access 16 KB ROMDocument17 pagesImportant Instructions To Examiners:: Calculate The Number of Address Lines Required To Access 16 KB ROMC052 Diksha PawarNo ratings yet
- Sarvali On DigbalaDocument14 pagesSarvali On DigbalapiyushNo ratings yet
- DMDW Mod3@AzDOCUMENTS - inDocument56 pagesDMDW Mod3@AzDOCUMENTS - inRakesh JainNo ratings yet
- Wasserman Chest 1997Document13 pagesWasserman Chest 1997Filip BreskvarNo ratings yet
- New Education Policy 2019Document55 pagesNew Education Policy 2019Aakarshanam VenturesNo ratings yet
- Modified Syllabus of Control SystemDocument2 pagesModified Syllabus of Control SystemDigambar PatilNo ratings yet
- Nama: Yetri Muliza Nim: 180101152 Bahasa Inggris V Reading Comprehension A. Read The Text Carefully and Answer The Questions! (40 Points)Document3 pagesNama: Yetri Muliza Nim: 180101152 Bahasa Inggris V Reading Comprehension A. Read The Text Carefully and Answer The Questions! (40 Points)Yetri MulizaNo ratings yet
- C6 RS6 Engine Wiring DiagramsDocument30 pagesC6 RS6 Engine Wiring DiagramsArtur Arturowski100% (3)
- 2010 - Impact of Open Spaces On Health & WellbeingDocument24 pages2010 - Impact of Open Spaces On Health & WellbeingmonsNo ratings yet
- Annamalai International Journal of Business Studies and Research AijbsrDocument2 pagesAnnamalai International Journal of Business Studies and Research AijbsrNisha NishaNo ratings yet
- QuickTransit SSLI Release Notes 1.1Document12 pagesQuickTransit SSLI Release Notes 1.1subhrajitm47No ratings yet
- Nokia MMS Java Library v1.1Document14 pagesNokia MMS Java Library v1.1nadrian1153848No ratings yet
- Obstetrical Hemorrhage: Reynold John D. ValenciaDocument82 pagesObstetrical Hemorrhage: Reynold John D. ValenciaReynold John ValenciaNo ratings yet
- Guidelines On Occupational Safety and Health in Construction, Operation and Maintenance of Biogas Plant 2016Document76 pagesGuidelines On Occupational Safety and Health in Construction, Operation and Maintenance of Biogas Plant 2016kofafa100% (1)
- 621F Ap4405ccgbDocument8 pages621F Ap4405ccgbAlwinNo ratings yet
- April 26, 2019 Strathmore TimesDocument16 pagesApril 26, 2019 Strathmore TimesStrathmore Times100% (1)
- Case StudyDocument2 pagesCase StudyBunga Larangan73% (11)
- Additional Help With OSCOLA Style GuidelinesDocument26 pagesAdditional Help With OSCOLA Style GuidelinesThabooNo ratings yet
- Conv VersationDocument4 pagesConv VersationCharmane Barte-MatalaNo ratings yet
- Water Jet CuttingDocument15 pagesWater Jet CuttingDevendar YadavNo ratings yet
- CR Vs MarubeniDocument15 pagesCR Vs MarubeniSudan TambiacNo ratings yet
- Disaster Management Plan 2018Document255 pagesDisaster Management Plan 2018sifoisbspNo ratings yet