You might also like
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasFrom EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasRating: 2.5 out of 5 stars2.5/5 (3)
- Curso de PLCDocument95 pagesCurso de PLCChristian Galindo67% (3)
- Puesta en marcha de sistemas de automatización industrial. ELEM0311From EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Rating: 3 out of 5 stars3/5 (1)
- Probador de Computadoras Automotrices ECU-22 v.1.0Document7 pagesProbador de Computadoras Automotrices ECU-22 v.1.0luisorozco2285% (13)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109From EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109No ratings yet
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208From EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208No ratings yet
- Reporte de Práctica Semaforo LogixProDocument8 pagesReporte de Práctica Semaforo LogixProIvan50% (2)
- UF1348 - Monitorización y resolución de incidencias en la interconexión de redes privadas con redes públicasFrom EverandUF1348 - Monitorización y resolución de incidencias en la interconexión de redes privadas con redes públicasNo ratings yet
- Testeo y verificación de equipos y periféricos microinformáticos. IFCT0108From EverandTesteo y verificación de equipos y periféricos microinformáticos. IFCT0108No ratings yet
- Desensamble y Ensamble de Una LaptopDocument32 pagesDesensamble y Ensamble de Una Laptopbbarbarafatla56% (9)
- UF0864 - Resolución de averías lógicas en equipos microinformáticosFrom EverandUF0864 - Resolución de averías lógicas en equipos microinformáticosNo ratings yet
- Compilador C CCS y Simulador Proteus para Microcontroladores PICFrom EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICRating: 2.5 out of 5 stars2.5/5 (5)
- FiestaDocument47 pagesFiestaAbel Muñoz100% (1)
- Ascensor - Practica para PLCDocument13 pagesAscensor - Practica para PLCJordi Mañe25% (4)
- UF0853 - Explotación de las funcionalidades del sistema microinformáticoFrom EverandUF0853 - Explotación de las funcionalidades del sistema microinformáticoNo ratings yet
- Manual de Programación Del P.L.C PDFDocument24 pagesManual de Programación Del P.L.C PDFMarcos MartinezNo ratings yet
- Curso de Protecciones 7sa522, 7SJ62, 7ut61Document53 pagesCurso de Protecciones 7sa522, 7SJ62, 7ut61digazo92% (12)
- Aplicación Típica de Un PLCDocument11 pagesAplicación Típica de Un PLCMaryCarmenNo ratings yet
- Informe Practica 1 Automatizacion AvanzadaDocument13 pagesInforme Practica 1 Automatizacion AvanzadaAlejandro100% (1)
- UF0466 - Testeo y verificación de equipos y periféricos microinformáticosFrom EverandUF0466 - Testeo y verificación de equipos y periféricos microinformáticosNo ratings yet
- Programacion de PLC Micrologix 1200 - ABDocument28 pagesProgramacion de PLC Micrologix 1200 - ABgamh13100% (9)
- UF0852 - Instalación y actualización de sistemas operativosFrom EverandUF0852 - Instalación y actualización de sistemas operativosRating: 5 out of 5 stars5/5 (1)
- Ucontrol Revista 0010Document70 pagesUcontrol Revista 0010Josbaney100% (4)
- Qué Es Una Base de DatosDocument8 pagesQué Es Una Base de DatosEdison Ferney Alba AcostaNo ratings yet
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209From EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209No ratings yet
- Manual Casio-CTK481-es PDFDocument50 pagesManual Casio-CTK481-es PDFMarcelo Inacio Marques PereiraNo ratings yet
- Solución - Evidencia - 2 - Informe - Desarrollar - Programas - en - Diagrama - de - ContactosDocument9 pagesSolución - Evidencia - 2 - Informe - Desarrollar - Programas - en - Diagrama - de - ContactosJesús David Pérez SevericheNo ratings yet
- Programación con lenguajes de guión en páginas web. IFCD0110From EverandProgramación con lenguajes de guión en páginas web. IFCD0110No ratings yet
- Curso PLC BÃ - SICO 2Document80 pagesCurso PLC BÃ - SICO 2Christian GalindoNo ratings yet
- GRAFCETDocument38 pagesGRAFCETLuis Lema100% (1)
- Simulacion de Enclavamientos en SubestacionesDocument3 pagesSimulacion de Enclavamientos en SubestacionesMario GonzálezNo ratings yet
- UF1876 - Atención a usuarios e instalación de aplicaciones cliente.From EverandUF1876 - Atención a usuarios e instalación de aplicaciones cliente.No ratings yet
- Ejercicios de Programacic3b3n Resueltos Con Step 7 PDFDocument71 pagesEjercicios de Programacic3b3n Resueltos Con Step 7 PDFSpawnkarioto100% (1)
- TP Barco Series 2 Service SP RecertDocument167 pagesTP Barco Series 2 Service SP RecertReynaldo GonzalezNo ratings yet
- Practicas ServofluidosDocument8 pagesPracticas Servofluidosquieroleer888No ratings yet
- To Monitorización de Procesos 2011Document10 pagesTo Monitorización de Procesos 2011adrianahoukiNo ratings yet
- Operaciones Basicas de ProgramacionDocument20 pagesOperaciones Basicas de ProgramacionJavo Zabdi FHNo ratings yet
- Practica 1Document10 pagesPractica 1PerSk EzNo ratings yet
- AI P3 AutomatProgramada IIDocument18 pagesAI P3 AutomatProgramada IIOscar Martínez SánchezNo ratings yet
- MANUAL MicrowinDocument14 pagesMANUAL MicrowinTann VegaNo ratings yet
- Ejercicios PLCDocument7 pagesEjercicios PLCEdwin Castellanos0% (1)
- Guia 2Document21 pagesGuia 2David AguilarNo ratings yet
- UII Tarea 2 - 17490597Document9 pagesUII Tarea 2 - 17490597José G. Hernandez VegaNo ratings yet
- Reporte Bobinas y ContactosDocument3 pagesReporte Bobinas y ContactosHernán TaboadaNo ratings yet
- Actividad 3 Sena PLCDocument11 pagesActividad 3 Sena PLCKatherin ContrerasNo ratings yet
- Introducción A STEP 5Document77 pagesIntroducción A STEP 5Victor Manuel VillamayorNo ratings yet
- Subrutinas RS-logixDocument10 pagesSubrutinas RS-logixxanderkeiNo ratings yet
- Tutorial de Programación en Simatic S5Document19 pagesTutorial de Programación en Simatic S5Johnn ChalcoNo ratings yet
- Introducción A STEP 5Document77 pagesIntroducción A STEP 5j5888No ratings yet
- Autómata ProgramableDocument16 pagesAutómata Programabletoa87No ratings yet
- Ar-Ssp-006 Meia-Dos - CilindrosDocument6 pagesAr-Ssp-006 Meia-Dos - CilindrosderickipondongNo ratings yet
- Tutorial de Programación en Simatic S5Document18 pagesTutorial de Programación en Simatic S5Carlos ToMenNo ratings yet
- 03-RS-Logix - InstruccionesDocument27 pages03-RS-Logix - InstruccionesEmanuel AguirreNo ratings yet
- Reporte PracticasDocument13 pagesReporte PracticasGerman RodriguezNo ratings yet
- Guia PLCDocument7 pagesGuia PLCjuliocesarmotaNo ratings yet
- Alarma Codificada Usando PLCDocument8 pagesAlarma Codificada Usando PLCJuano Inga OrtegaNo ratings yet
- SIMATIC ProgramacionDocument48 pagesSIMATIC ProgramacionJunior Adan Enriquez CabezudoNo ratings yet
- GPLCDocument7 pagesGPLCIvan SparkNo ratings yet
- Control EsDocument4 pagesControl EsLéandró Sáx100% (1)
- PLC BasicoDocument7 pagesPLC BasicoJavier SalinasNo ratings yet
- Sistemas de CooredenadasDocument42 pagesSistemas de CooredenadasCesar CadelaNo ratings yet
- ELT 3890 AUTOMÁTICA I LABORATORIO No. 3 SOFTWARE DE PROGRAMACIÓN STEP 7 - MICRO - WIN 32 - PLC SIEMENSDocument8 pagesELT 3890 AUTOMÁTICA I LABORATORIO No. 3 SOFTWARE DE PROGRAMACIÓN STEP 7 - MICRO - WIN 32 - PLC SIEMENSYeniluz Janeth Banegas AlaveNo ratings yet
- Laboratorio 1Document9 pagesLaboratorio 1Diego MuñaquiNo ratings yet
- Resolución de averías lógicas en equipos microinformáticos. IFCT0309From EverandResolución de averías lógicas en equipos microinformáticos. IFCT0309No ratings yet
- Meceprim - TaponesDocument1 pageMeceprim - TaponestxagusNo ratings yet
- Figuras PNE-PHH-PAE-PAVDocument1 pageFiguras PNE-PHH-PAE-PAVtxagusNo ratings yet
- Figuras PCM PCH PCV PCRDocument1 pageFiguras PCM PCH PCV PCRtxagusNo ratings yet
- Costos Equipos-Industriales, Índice de CostosDocument1 pageCostos Equipos-Industriales, Índice de CostostxagusNo ratings yet
- Costo de Equipos Industriales, Factores CorrecciónDocument2 pagesCosto de Equipos Industriales, Factores CorreccióntxagusNo ratings yet
- Automat Ind P4Document4 pagesAutomat Ind P4txagusNo ratings yet
- Señales Analogicas PruebaDocument20 pagesSeñales Analogicas PruebaBrayanNoemiNo ratings yet
- Diagrama de Moody Modificado PDFDocument1 pageDiagrama de Moody Modificado PDFtxagusNo ratings yet
- Reglas de Juego RFEB PDFDocument14 pagesReglas de Juego RFEB PDFtxagusNo ratings yet
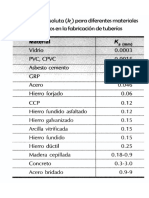
- Rugosidad Absoluta Materiales Tuberías PDFDocument1 pageRugosidad Absoluta Materiales Tuberías PDFtxagus100% (1)
- Rugosidad Absoluta Materiales TuberíasDocument1 pageRugosidad Absoluta Materiales Tuberíastxagus100% (1)
- Guia Basica para Hacer Instalaciones Electricas ResidencialesDocument13 pagesGuia Basica para Hacer Instalaciones Electricas Residencialesjesus_guedezNo ratings yet
- AP-como ConectarseDocument7 pagesAP-como Conectarse58guillermoNo ratings yet
- CARGADocument2 pagesCARGAIng. José García, CSSONo ratings yet
- Scada UtDocument28 pagesScada UtMastER ChiFFNo ratings yet
- Introducción Al Control Lógico ProgramableeDocument7 pagesIntroducción Al Control Lógico ProgramableeJave Zabdiel Hernandez MarinNo ratings yet
- T4310 - VIT - El Computador BolivarianoDocument1 pageT4310 - VIT - El Computador BolivarianoAndrés Zavala - Personal TrainingNo ratings yet
- LÍNEA 35 - QUINCALLERÍA - ThermowinDocument6 pagesLÍNEA 35 - QUINCALLERÍA - ThermowinyerkoNo ratings yet
- Botoneras LKDocument2 pagesBotoneras LKRoberto Falcon BelmonteNo ratings yet
- Snooper+: Interfaz de La Diagnosis para Conectar El Vehículo Con La Aplicación WOW CaracterísticasDocument1 pageSnooper+: Interfaz de La Diagnosis para Conectar El Vehículo Con La Aplicación WOW CaracterísticasJosé Manuel ochochoque AldanaNo ratings yet
- Materiales SCEDocument31 pagesMateriales SCEdonaldo.andresNo ratings yet
- Motorola MDR200Document2 pagesMotorola MDR200JuanchoNo ratings yet
- Inventario 2014Document50 pagesInventario 2014Jenny CastilloNo ratings yet
- Elementos RoscadosDocument9 pagesElementos RoscadosJose Alvaro100% (2)
- Proforma LapDocument1 pageProforma LapGerardo LozanoNo ratings yet
- TramasDocument2 pagesTramasDGP. Morgenstern KarinaNo ratings yet
- OsciloscopioDocument17 pagesOsciloscopioFaidherRodriguezNo ratings yet
- Axtrax 1 PDFDocument25 pagesAxtrax 1 PDFRG RojasNo ratings yet
- Laboratorio 06Document11 pagesLaboratorio 06Gonzalo Barrios Amesquita0% (1)
- Realización Del Fileteado de Un Agujero, Tornillo o Esparrago Roscado ManualmenteDocument11 pagesRealización Del Fileteado de Un Agujero, Tornillo o Esparrago Roscado ManualmenteSasaNo ratings yet
- Sesión 1 - Ensamblaje de PCDocument13 pagesSesión 1 - Ensamblaje de PCCalderon Bellodas AbelNo ratings yet
- Ventajas y Desventajas de ScilabDocument2 pagesVentajas y Desventajas de ScilabCristofer Guambo0% (1)