You might also like
- Testing SortDocument1 pageTesting SortSourav SinghNo ratings yet
- Bills Jan-16 Feb-16 Mar-16 Rent 1200 1200 1200 Car 250 250 250 Credit Card 125 150 120 Food 300 250 350 Phone 75 75 90Document1 pageBills Jan-16 Feb-16 Mar-16 Rent 1200 1200 1200 Car 250 250 250 Credit Card 125 150 120 Food 300 250 350 Phone 75 75 90Sourav SinghNo ratings yet
- Excel FunctionsDocument5 pagesExcel FunctionsSourav SinghNo ratings yet
- Coffee ChainDocument2 pagesCoffee ChainSourav SinghNo ratings yet
- Ogive Hist Rel Freq Cumm Rel Freq Freq Cumm FreqDocument2 pagesOgive Hist Rel Freq Cumm Rel Freq Freq Cumm FreqSourav SinghNo ratings yet
- Excel 102 ExercisesDocument87 pagesExcel 102 Exercisesaashi98No ratings yet
- Pre-Installation Setup of Mandatory Software Components for SAP BW on HANADocument20 pagesPre-Installation Setup of Mandatory Software Components for SAP BW on HANASourav SinghNo ratings yet
- Hola Kola Case SolutionDocument8 pagesHola Kola Case Solutionsathya50% (8)
- Byju ESDocument6 pagesByju ESSourav SinghNo ratings yet
- Indian Bank ExperimentDocument4 pagesIndian Bank ExperimentSourav SinghNo ratings yet
- Exercise For Basic Stat 1Document60 pagesExercise For Basic Stat 1Sourav SinghNo ratings yet
- Histogram Bin Confusion ClearedDocument9 pagesHistogram Bin Confusion ClearedSourav SinghNo ratings yet
- DMV ProjectDocument411 pagesDMV ProjectSourav SinghNo ratings yet
- OriginalDocument113 pagesOriginalSourav SinghNo ratings yet
- Playground Safety Checks: Site Code Site Location Swings Slides Rocker Climbing Frame Overall ResultDocument2 pagesPlayground Safety Checks: Site Code Site Location Swings Slides Rocker Climbing Frame Overall ResultSourav SinghNo ratings yet
- Daybook: Date Account Debit CreditDocument5 pagesDaybook: Date Account Debit CreditSourav SinghNo ratings yet
- DMV ProjectDocument411 pagesDMV ProjectSourav SinghNo ratings yet
- Maven Market AnalysisDocument2 pagesMaven Market AnalysisSourav SinghNo ratings yet
- Case Study On Ola: : In-Cab Promotions and Advertisement CommissionsDocument2 pagesCase Study On Ola: : In-Cab Promotions and Advertisement CommissionsSourav SinghNo ratings yet
- OriginalDocument113 pagesOriginalSourav SinghNo ratings yet
- PGDM Batch 2020-2022 Microeconomics Final Examination Question Paper 26 December 2020 NAME - Sourabh Singh Roll - DM22170Document5 pagesPGDM Batch 2020-2022 Microeconomics Final Examination Question Paper 26 December 2020 NAME - Sourabh Singh Roll - DM22170Sourav SinghNo ratings yet
- Tableau Sample workbook-SuperStoreUS - 2015Document277 pagesTableau Sample workbook-SuperStoreUS - 2015YuvarajaNo ratings yet
- Year 0 - 8000 - 8800 1 7600 6800 2 7800 7600 3 8400 7800 4 9600 7950 5 9800 8300 6 8450 7 8900 8 9300 Project Rose Project LilyDocument2 pagesYear 0 - 8000 - 8800 1 7600 6800 2 7800 7600 3 8400 7800 4 9600 7950 5 9800 8300 6 8450 7 8900 8 9300 Project Rose Project LilySourav SinghNo ratings yet
- Digital Marketing Demystified PDFDocument1 pageDigital Marketing Demystified PDFAditya ChaudharyNo ratings yet
- Maven Market AnalysisDocument2 pagesMaven Market AnalysisSourav SinghNo ratings yet
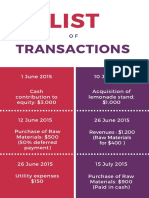
- Practical Exercise List of Transactions PDFDocument2 pagesPractical Exercise List of Transactions PDFSourav SinghNo ratings yet
- Netflix Case StudyDocument3 pagesNetflix Case StudySourav SinghNo ratings yet
- Daybook: Date Account Debit CreditDocument5 pagesDaybook: Date Account Debit CreditSourav SinghNo ratings yet
- Act Project ReportDocument13 pagesAct Project ReportSourav SinghNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 7050 Series 1/10G BASE-T Data Center Switches: Product HighlightsDocument6 pages7050 Series 1/10G BASE-T Data Center Switches: Product Highlightschalapathi pNo ratings yet
- TL Audio Valve Compressor User ManualDocument16 pagesTL Audio Valve Compressor User ManualNicolas ZuluagaNo ratings yet
- Fm-200 Component Description: Discharge IndicatorsDocument1 pageFm-200 Component Description: Discharge IndicatorsLogan Marquez AguayoNo ratings yet
- JD723A - JD724B User's Manual R1.6Document115 pagesJD723A - JD724B User's Manual R1.6Fernando BenjumedaNo ratings yet
- Touch Screen Technology GuideDocument17 pagesTouch Screen Technology GuidemaddagaduNo ratings yet
- Notice Numark Axis 9Document12 pagesNotice Numark Axis 9Martin RahardNo ratings yet
- IEC 61508 / IEC 61511 SIL PresentationDocument8 pagesIEC 61508 / IEC 61511 SIL PresentationRobin Alan Cressent33% (3)
- AssignmentDocument21 pagesAssignmentZAhad Ali ZafarNo ratings yet
- MINI ES P30B3 E R3 Installation ManualV1.1(一般)Document47 pagesMINI ES P30B3 E R3 Installation ManualV1.1(一般)elisa_10No ratings yet
- 1310 Tecnico PDFDocument100 pages1310 Tecnico PDFRicardo Vazquez SalinasNo ratings yet
- Mobile Path Loss Formula LabDocument11 pagesMobile Path Loss Formula LabaditNo ratings yet
- Audio Academy BrochureDocument36 pagesAudio Academy BrochureuditNo ratings yet
- Mechanical Engineering - Final PDFDocument248 pagesMechanical Engineering - Final PDFRubal SharmaNo ratings yet
- Physics 101 PDFDocument3 pagesPhysics 101 PDFapi-279026508No ratings yet
- Update 14-9-2018 JADWAL Germas 2018Document121 pagesUpdate 14-9-2018 JADWAL Germas 2018Puskesmas KedungkandangNo ratings yet
- Customer - 2017 12 14Document5 pagesCustomer - 2017 12 14Angelo ManrealNo ratings yet
- Ferroresonance Explained - Incident Prevention Article - 100212Document2 pagesFerroresonance Explained - Incident Prevention Article - 100212Anonymous 980dmQfwmiNo ratings yet
- C-9403 Conventional Sounder Strobe Installation and Operation Manual Issue1.13Document2 pagesC-9403 Conventional Sounder Strobe Installation and Operation Manual Issue1.13mohamed ghareebNo ratings yet
- Samsung LCD Le37c630Document296 pagesSamsung LCD Le37c630Shark69No ratings yet
- Backup Depth and Speed Display ALS6A200: Operations and Maintenance ManualDocument27 pagesBackup Depth and Speed Display ALS6A200: Operations and Maintenance ManualDiego CorderoNo ratings yet
- Testing Data Radio Modem With Serial Port Tool V1.13: 1. Usb Board DefinitionsDocument13 pagesTesting Data Radio Modem With Serial Port Tool V1.13: 1. Usb Board DefinitionsHimanshu VermaNo ratings yet
- AntenaaDocument1 pageAntenaahamza qayyumNo ratings yet
- GSB 18 Ve 2 Li Professional Manual 135080 PDFDocument162 pagesGSB 18 Ve 2 Li Professional Manual 135080 PDFElmer TimanaNo ratings yet
- iR-ADV C5030-C5035-C5045-C5051 040112Document12 pagesiR-ADV C5030-C5035-C5045-C5051 040112dhirajkumar_10% (1)
- Eele461 Module 07Document48 pagesEele461 Module 07cdcrossroaderNo ratings yet
- Experiment-5:: Program DefinitionDocument4 pagesExperiment-5:: Program DefinitionAmitabh KumarNo ratings yet
- Holiday Homework for Class XII - Summary of AssignmentsDocument15 pagesHoliday Homework for Class XII - Summary of AssignmentsIshaan SharmaNo ratings yet
- Identify Parts & Indicators of PLC Allen Bradley Micrologix 1400Document4 pagesIdentify Parts & Indicators of PLC Allen Bradley Micrologix 1400rashmi patilNo ratings yet
- Power Electronics Project Title PDFDocument4 pagesPower Electronics Project Title PDFpowerNo ratings yet