You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- BCN 3224 - Exam 3 ReviewDocument34 pagesBCN 3224 - Exam 3 Reviewmgwin17No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- SSP421 Body BasicsDocument76 pagesSSP421 Body Basicsmamuko100% (3)
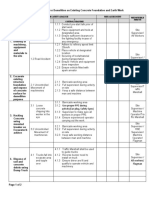
- ULSADO-JSA-Demolation Existing Concrete FoundationDocument2 pagesULSADO-JSA-Demolation Existing Concrete FoundationKelvin Tan75% (4)
- Maximum Pressure Rating Schedule 160, Schedule 40 and Schedule 80 - Engineers EdgeDocument5 pagesMaximum Pressure Rating Schedule 160, Schedule 40 and Schedule 80 - Engineers EdgeDevanshu KrNo ratings yet
- Boq Grand SummaryDocument44 pagesBoq Grand Summaryelsabet gezahegnNo ratings yet
- 4E Roadmap for Energy Efficient Electric Motors and Motor SystemsDocument30 pages4E Roadmap for Energy Efficient Electric Motors and Motor SystemsCarlos LopezNo ratings yet
- Alcatel Support Document For Cable System in CubaDocument11 pagesAlcatel Support Document For Cable System in CubaDEGNISSODENo ratings yet
- John Deere 9650 Sts Parts CatalogDocument20 pagesJohn Deere 9650 Sts Parts CatalogDennis100% (56)
- Parameters Calculation of Turbulent Fluid Flow in A Pipe of A Circular Cross SectionDocument5 pagesParameters Calculation of Turbulent Fluid Flow in A Pipe of A Circular Cross SectionInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- The Influence Study of The Mole Ratio Reactant in Ceftriaxone Sodium Synthesis Against The Yield of The ProductionDocument6 pagesThe Influence Study of The Mole Ratio Reactant in Ceftriaxone Sodium Synthesis Against The Yield of The ProductionInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Modeling and Simulation Ofa Water Gas Shift Reactor Operating at A Low PressureDocument11 pagesModeling and Simulation Ofa Water Gas Shift Reactor Operating at A Low PressureInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Contributions On Knowledge Management in Mechanical EngineeringDocument5 pagesContributions On Knowledge Management in Mechanical EngineeringInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- The Influence of The Calsium Silicate Panel On Soil-Paper Walls in Low Income Houses in IndonesiaDocument9 pagesThe Influence of The Calsium Silicate Panel On Soil-Paper Walls in Low Income Houses in IndonesiaInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- MHD Newtonian and Non-Newtonian Nano Fluid Flow Passing On A Magnetic Sphere With Mixed Convection EffectDocument12 pagesMHD Newtonian and Non-Newtonian Nano Fluid Flow Passing On A Magnetic Sphere With Mixed Convection EffectInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- HIGGSBOSON RADIUS of ACTIONDocument4 pagesHIGGSBOSON RADIUS of ACTIONInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Bioremediation of Soils Polluted by Petroleum Hydrocarbons by Pseudomonas PutidaDocument10 pagesBioremediation of Soils Polluted by Petroleum Hydrocarbons by Pseudomonas PutidaInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Measuring The Facility of Use of A Website Designed With A Methodology Based On Concepts of Design of OntologiesDocument9 pagesMeasuring The Facility of Use of A Website Designed With A Methodology Based On Concepts of Design of OntologiesInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Predictive Regression Models of Water Quality Parameters For River Amba in Nasarawa State, NigeriaDocument10 pagesPredictive Regression Models of Water Quality Parameters For River Amba in Nasarawa State, NigeriaInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Cutting Process ControlDocument5 pagesCutting Process ControlInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Prediction of Poultry Yield Using Data Mining TechniquesDocument17 pagesPrediction of Poultry Yield Using Data Mining TechniquesInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- The Soil Problems in Constructions of AirportDocument5 pagesThe Soil Problems in Constructions of AirportInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Microbiological Quality of Selected Street Foods From Antananarivo On 2016-2017: Public Health ImplicationsDocument8 pagesMicrobiological Quality of Selected Street Foods From Antananarivo On 2016-2017: Public Health ImplicationsInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Numerical Analysis of The Density Distribution Within Scored TabletsDocument8 pagesNumerical Analysis of The Density Distribution Within Scored TabletsInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- The Effect of Using Solar Chimney On Reduced Heating Load in Cold Climate of USDocument8 pagesThe Effect of Using Solar Chimney On Reduced Heating Load in Cold Climate of USInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Control of Direct Current Machine by The Change of Resistance in Armature CircuitDocument5 pagesControl of Direct Current Machine by The Change of Resistance in Armature CircuitInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Analysis of Three-Dimensional Natural Convection and Entropy Generation in A Water Filled Open Trapezoidal EnclosureDocument7 pagesAnalysis of Three-Dimensional Natural Convection and Entropy Generation in A Water Filled Open Trapezoidal EnclosureInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Effects of Kingcure K-11 Hardener and Epoxidized Sunflower Oil On The Properties of Polymer Composite Material Based On Epoxy Resin Gelr 128Document6 pagesEffects of Kingcure K-11 Hardener and Epoxidized Sunflower Oil On The Properties of Polymer Composite Material Based On Epoxy Resin Gelr 128International Journal of Innovation Engineering and Science ResearchNo ratings yet
- Usability Study of A Methodology Based On Concepts of Ontology Design To Define Website StructuresDocument9 pagesUsability Study of A Methodology Based On Concepts of Ontology Design To Define Website StructuresInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- On Carbon Emission Credits Options PricingDocument15 pagesOn Carbon Emission Credits Options PricingInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Computer and Laboratory Research of Condition of MIM 4140 Alloy After Injection Molding and SinteringDocument9 pagesComputer and Laboratory Research of Condition of MIM 4140 Alloy After Injection Molding and SinteringInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Subsistence of Host Guest Inclusion Complexes Ofbiologically Active Moleculeswith Ionic Liquid Probed by Physicochemical ExplorationDocument15 pagesSubsistence of Host Guest Inclusion Complexes Ofbiologically Active Moleculeswith Ionic Liquid Probed by Physicochemical ExplorationInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Analysis of Rural Road Networks Considering RedundancyDocument6 pagesAnalysis of Rural Road Networks Considering RedundancyInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Performance Comparison of Power Control Methods That Use Neural Network and Fuzzy Inference System in CDMADocument6 pagesPerformance Comparison of Power Control Methods That Use Neural Network and Fuzzy Inference System in CDMAInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- The Scaling Invariant Spaces For Fractional Navier - Stokes EquationsDocument5 pagesThe Scaling Invariant Spaces For Fractional Navier - Stokes EquationsInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- A BBO-based Algorithm For The Non-Convex Economic/environmental DispatchDocument10 pagesA BBO-based Algorithm For The Non-Convex Economic/environmental DispatchInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Hypergiant - Conducting Nanogranular Compound Materials, As IR-photon Detectors Forboson - Current Transport at Room Temperature With GA/cm Current Carrying CapabilityDocument9 pagesHypergiant - Conducting Nanogranular Compound Materials, As IR-photon Detectors Forboson - Current Transport at Room Temperature With GA/cm Current Carrying CapabilityInternational Journal of Innovation Engineering and Science ResearchNo ratings yet
- Building A Big Data Platform For Smart Cities: Experience and Lessons From SantanderDocument8 pagesBuilding A Big Data Platform For Smart Cities: Experience and Lessons From SantanderDylan GuedesNo ratings yet
- Ccsviiid1 2029-3Document2 pagesCcsviiid1 2029-3DieguitoOmarMoralesNo ratings yet
- Strength Calculation and Dimensioning of Joints: Prepared By: Samson Yohannes Assistant ProfessorDocument45 pagesStrength Calculation and Dimensioning of Joints: Prepared By: Samson Yohannes Assistant ProfessorBK MKNo ratings yet
- TBR Wipro LeanDocument8 pagesTBR Wipro LeanAnonymous fVnV07HNo ratings yet
- Espectrómetro FT-IR Nicolet Is 10Document1 pageEspectrómetro FT-IR Nicolet Is 10Adriano BludegardNo ratings yet
- Romanian Power Grid Substation Refitting StrategyDocument16 pagesRomanian Power Grid Substation Refitting StrategyParmeshwar MbNo ratings yet
- HF Acid Processing Valves Technical SpecificationsDocument4 pagesHF Acid Processing Valves Technical Specificationssemarasik_651536604No ratings yet
- Debug 1214Document15 pagesDebug 1214manhlong2009No ratings yet
- Ktu Laca Solved Question PaperDocument22 pagesKtu Laca Solved Question PaperSofiyaNo ratings yet
- Performance of A Test Embankment Constructed On An Organic Clayey Silt DepositDocument10 pagesPerformance of A Test Embankment Constructed On An Organic Clayey Silt DepositGurtejSinghChanaNo ratings yet
- Xxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedDocument2 pagesXxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedMahamoud HamoudNo ratings yet
- Description Wincc Project Scanner enDocument9 pagesDescription Wincc Project Scanner enDugPigeonNo ratings yet
- MPTO Charts566662Document25 pagesMPTO Charts566662andres ortizNo ratings yet
- Seismic Analysis of A Valley-Fill Heap Leach PadDocument17 pagesSeismic Analysis of A Valley-Fill Heap Leach PadMARCOS ABRAHAM ALEJANDRO BALDOCEDA HUAYASNo ratings yet
- Unit 2 - EDDocument42 pagesUnit 2 - EDMohit L.E. 008No ratings yet
- JT85 Vertical to Horizontal Drive Shaft Gearbox, 90 Deg Bevel Gear Box, 4 to 1 Gearbox, 2-Way Gearbox, Right Angle Gearbox Speed Increaser,Speed Increaser Gearbox Micro, 90 Degree Power Transfer 1 to 1 RatioDocument7 pagesJT85 Vertical to Horizontal Drive Shaft Gearbox, 90 Deg Bevel Gear Box, 4 to 1 Gearbox, 2-Way Gearbox, Right Angle Gearbox Speed Increaser,Speed Increaser Gearbox Micro, 90 Degree Power Transfer 1 to 1 RatioWarren LeeNo ratings yet
- Accenture Robotic Process Auto POV FinalDocument12 pagesAccenture Robotic Process Auto POV FinalJake RuksNo ratings yet
- Mine Design and SchedulingDocument10 pagesMine Design and SchedulingLeandro FagundesNo ratings yet
- Best Practices in PL/SQL: Karthikeyan MDocument15 pagesBest Practices in PL/SQL: Karthikeyan MranusofiNo ratings yet
- MIMO Capacity Increase in UMTS/HSPA+ SystemsDocument159 pagesMIMO Capacity Increase in UMTS/HSPA+ SystemslikameleNo ratings yet
- Galaxy Electrical: Zener DiodesDocument3 pagesGalaxy Electrical: Zener Diodesdragon-red0816No ratings yet
- Cantonk HD-Analog Cameras Price List V201407BDocument7 pagesCantonk HD-Analog Cameras Price List V201407BCatalin StefanutNo ratings yet