You might also like
- Rele Minotaur PDFDocument88 pagesRele Minotaur PDFmigue81fNo ratings yet
- Informe Final - Laboratorio de ActuadoresDocument52 pagesInforme Final - Laboratorio de ActuadoresPaula Moreno PlazasNo ratings yet
- Informe de MicroondasDocument9 pagesInforme de MicroondasLeevan BautistaNo ratings yet
- Gomez Iñigo AlbertoDocument41 pagesGomez Iñigo AlbertowilliamNo ratings yet
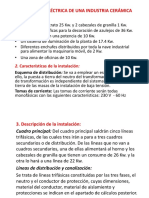
- Instalación Eléctrica de Una Industria CerámicaDocument15 pagesInstalación Eléctrica de Una Industria CerámicaapmitmaNo ratings yet
- Familia CADocument30 pagesFamilia CADarwin YupaNo ratings yet
- Actual - Diseño Malla A Tierra de Una Subestacion ElectricaDocument29 pagesActual - Diseño Malla A Tierra de Una Subestacion ElectricaIvan Quispe Palomino0% (1)
- Aislante o MetalDocument8 pagesAislante o MetalRamón Vargas CortezNo ratings yet
- Campo Electrico y Potencial ElectricoDocument4 pagesCampo Electrico y Potencial ElectricoJuan DNo ratings yet
- Redes MicroondasDocument19 pagesRedes MicroondasCsar HidalgoNo ratings yet
- Sistemas de Radio I - Lab 3 OsciladoresDocument11 pagesSistemas de Radio I - Lab 3 OsciladoresHiuston Cueto CcoriNo ratings yet
- Tablas Experimento 5Document4 pagesTablas Experimento 5Jose Manuel Torre ParejaNo ratings yet
- Informe Circuitos TrifasicaDocument7 pagesInforme Circuitos Trifasicanetflix gratisNo ratings yet
- Tarea 2.1Document8 pagesTarea 2.1mcline1000No ratings yet
- Diodo Semiconductor - 2019-IIDocument11 pagesDiodo Semiconductor - 2019-IIFrank CondoriNo ratings yet
- Investigacion 2.3 y 2.4 Subestaciones de Potencia IndustrialesDocument34 pagesInvestigacion 2.3 y 2.4 Subestaciones de Potencia IndustrialesMiguel E. Chávez Avendaño100% (1)
- Leyes de Kirchhoff y Divisor de VoltajeDocument3 pagesLeyes de Kirchhoff y Divisor de VoltajeJohn NarvaezNo ratings yet
- Previo 1Document13 pagesPrevio 1Luis Enrique UlloaNo ratings yet
- Problemas de CondensadoresDocument2 pagesProblemas de CondensadoresPedro BortotNo ratings yet
- Evaluacion Fisica 11 3pDocument2 pagesEvaluacion Fisica 11 3pEduardo Castañeda0% (1)
- 18 Tarea 3 Electronica AnalogaDocument8 pages18 Tarea 3 Electronica Analogamaria rojasNo ratings yet
- CAPACITORESDocument8 pagesCAPACITORESjacintocarbone92No ratings yet
- Hoja-3. Potencial ElectricoDocument6 pagesHoja-3. Potencial ElectricoShery GarcíaNo ratings yet
- Vovinas Magneticas Catalogo - D15000100149965 PDFDocument66 pagesVovinas Magneticas Catalogo - D15000100149965 PDFdavidNo ratings yet
- S05.s2 - Material Capacitores y DieléctricosDocument31 pagesS05.s2 - Material Capacitores y DieléctricosRamos Olivos Piero EstefanoNo ratings yet
- 6 Transformadores+Document55 pages6 Transformadores+cesarchiletNo ratings yet
- Semana 11 Modelamiento Del GeneradorDocument40 pagesSemana 11 Modelamiento Del GeneradorYadir carranza ingaNo ratings yet
- Montaje y Desmontaje de Un AlternadorDocument12 pagesMontaje y Desmontaje de Un AlternadorNando Silva33% (6)
- Inox BWDocument6 pagesInox BWK Aguirre OrtNo ratings yet
- Diagonal LL - 220kV - Rev - 0Document1 pageDiagonal LL - 220kV - Rev - 0Miguel Angel Alvarado LewisNo ratings yet
- Influencia. La psicología de la persuasiónFrom EverandInfluencia. La psicología de la persuasiónRating: 4.5 out of 5 stars4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másFrom EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másRating: 2.5 out of 5 stars2.5/5 (3)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasFrom EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasRating: 4.5 out of 5 stars4.5/5 (14)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...From EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Rating: 5 out of 5 stars5/5 (4)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaFrom EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaRating: 4.5 out of 5 stars4.5/5 (116)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaFrom EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaRating: 5 out of 5 stars5/5 (1)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroFrom EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroRating: 4 out of 5 stars4/5 (1)
- Auditoría de seguridad informática: Curso prácticoFrom EverandAuditoría de seguridad informática: Curso prácticoRating: 5 out of 5 stars5/5 (1)
- Cómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaFrom EverandCómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaRating: 4 out of 5 stars4/5 (9)
- 7 tendencias digitales que cambiarán el mundoFrom Everand7 tendencias digitales que cambiarán el mundoRating: 4.5 out of 5 stars4.5/5 (86)
- Fundamentos de Redes InformáticasFrom EverandFundamentos de Redes InformáticasRating: 4.5 out of 5 stars4.5/5 (9)