You might also like
- Theo JansenDocument3 pagesTheo JansenLuis BastianNo ratings yet
- Theo Jansen ReporteDocument23 pagesTheo Jansen ReporteGilbertoCarrilloNo ratings yet
- Theo Jansen MecanismoDocument11 pagesTheo Jansen Mecanismogilbertoflores50% (2)
- Mecanismo de Theo JansenDocument1 pageMecanismo de Theo Jansenstefano mujica winchonlongNo ratings yet
- Mecanismo de Theo JansenDocument11 pagesMecanismo de Theo JansenAndrés Marín Chávez GuevaraNo ratings yet
- Construya un strober LED de bajo costoDocument8 pagesConstruya un strober LED de bajo costohandru522No ratings yet
- Diseño y Construcción de Un Móvil Electromecánico Con Las Características Mínismas de Un RobotDocument6 pagesDiseño y Construcción de Un Móvil Electromecánico Con Las Características Mínismas de Un RobotCristian Cisneros100% (2)
- Proyecto Theo Jansen FinalDocument9 pagesProyecto Theo Jansen FinalDavid antonio Suárez martinezNo ratings yet
- Puertas y VentanasDocument15 pagesPuertas y VentanasMarcela Barahona ZavalaNo ratings yet
- Cartel Led GiratorioDocument8 pagesCartel Led GiratorioIvan MillanNo ratings yet
- Escaleras 120526155927 Phpapp02Document36 pagesEscaleras 120526155927 Phpapp02Carlos Eduardo Cacho CorreaNo ratings yet
- Drones para La EducaciónDocument10 pagesDrones para La EducaciónNataliaNo ratings yet
- Foco y LucesDocument47 pagesFoco y LucessoloeliNo ratings yet
- Mecanismos para transmitir y transformar movimientoDocument22 pagesMecanismos para transmitir y transformar movimientoRosa Elemil MartinezNo ratings yet
- Dispositivos MecánicosDocument8 pagesDispositivos MecánicosEnrique CastilloNo ratings yet
- Cuadro Comparativo de Robots HumanoidesDocument4 pagesCuadro Comparativo de Robots HumanoidesacademicosisNo ratings yet
- UD13.Elementos Transform Adores Del MovimientoDocument21 pagesUD13.Elementos Transform Adores Del Movimientofagonzalez1958No ratings yet
- Codigo de Colores LedDocument5 pagesCodigo de Colores LedEl YoshiNo ratings yet
- Vigas ArmadasDocument32 pagesVigas ArmadasAnonymous mlmnk1MNo ratings yet
- Herramientas Manuales y ElectricasDocument9 pagesHerramientas Manuales y ElectricasOscarDonaldoNo ratings yet
- Proyecto Integrador 3 Semestre PDFDocument3 pagesProyecto Integrador 3 Semestre PDFPaola Andrea Bermeo QuinayasNo ratings yet
- 01 Teoria EscalerasDocument43 pages01 Teoria EscalerasAngela AlagonNo ratings yet
- Catalogo Guaily. Línea de Muebles Ecológicos.Document25 pagesCatalogo Guaily. Línea de Muebles Ecológicos.jorge_082100% (2)
- Amarres de cables eléctricos residencialesDocument8 pagesAmarres de cables eléctricos residencialesJovanny Zuñiga DiazNo ratings yet
- Ascensores y Escaleras Mecanicas. Vanguardia y TecnologiaDocument13 pagesAscensores y Escaleras Mecanicas. Vanguardia y TecnologiaAlexandra Patricia Marquez OliverosNo ratings yet
- Proyecto de TermodinamicaDocument13 pagesProyecto de TermodinamicaAnonymous kF2wwm100% (1)
- Maquinas y MecanismosDocument8 pagesMaquinas y Mecanismosjiovany moralesNo ratings yet
- Los 3 Primeros PritzkerDocument19 pagesLos 3 Primeros PritzkerBruno QuerciaNo ratings yet
- Reparacion y Mantenimiento de ImpresorasDocument2 pagesReparacion y Mantenimiento de ImpresorasjolveragNo ratings yet
- Guia 1 COMPONENTES ELECTRÓNICOS Grado 11Document4 pagesGuia 1 COMPONENTES ELECTRÓNICOS Grado 11Jakeline Trespalacios MartinezNo ratings yet
- Sistemas de control y automatismos en máquinasDocument14 pagesSistemas de control y automatismos en máquinasAG Adrian100% (1)
- Sensores Industriales TM PDFDocument168 pagesSensores Industriales TM PDFMiguel VitaleNo ratings yet
- Curso Práctico para Aprender A Leer Música (Solfeo)Document9 pagesCurso Práctico para Aprender A Leer Música (Solfeo)moromarino3663No ratings yet
- Tipos de Empalmes Eléctricos y Pasos para RealizarlosDocument27 pagesTipos de Empalmes Eléctricos y Pasos para RealizarlosRandall ChinchillaNo ratings yet
- Pa-Co14 - Como Construir Una Casa ClubDocument7 pagesPa-Co14 - Como Construir Una Casa Clubkrahmer29No ratings yet
- Introducción A Los MecanismoDocument12 pagesIntroducción A Los MecanismoCarlos CarmonaNo ratings yet
- Defectos de MaderaDocument14 pagesDefectos de MaderaMaria JaramilloNo ratings yet
- Manual de Interfaz Arduino PDFDocument39 pagesManual de Interfaz Arduino PDFDante LlerenaNo ratings yet
- 203 - Tema 6 de 3º Eso (Maquinas y Automatismos)Document6 pages203 - Tema 6 de 3º Eso (Maquinas y Automatismos)patriciacd_19No ratings yet
- 5.0 Módulo Operadores Mecanicos (Final)Document23 pages5.0 Módulo Operadores Mecanicos (Final)Sandra Liliana BerrioNo ratings yet
- Sensores y Transductores U2Document34 pagesSensores y Transductores U2Malena RodriguezNo ratings yet
- Vitrinismo BADocument3 pagesVitrinismo BAsantiago montañez florezNo ratings yet
- Los Sistemas de UnidadesDocument23 pagesLos Sistemas de UnidadesLidia MaNo ratings yet
- Mecanismo Theo JansenDocument4 pagesMecanismo Theo JansenManúelAntonioLara100% (1)
- Empalmes Eléctricos: Tipos y CaracterísticasDocument7 pagesEmpalmes Eléctricos: Tipos y CaracterísticasJose Uriel GUZMAN BELLO100% (1)
- Materiales. AislantesDocument14 pagesMateriales. AislantesjackfroxNo ratings yet
- DiTrDocument78 pagesDiTrCesar LopezNo ratings yet
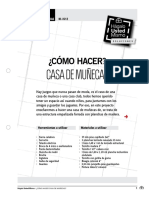
- Como Hacer Casa de MuñecasDocument9 pagesComo Hacer Casa de MuñecasLorwins LoveraNo ratings yet
- Poster Presentacion Theo JansenDocument1 pagePoster Presentacion Theo JansenJulio Andrés Campos VásquezNo ratings yet
- Instalaciones eléctricas: normas y materialesDocument124 pagesInstalaciones eléctricas: normas y materialesElsa Andrea Rojas RiquelmeNo ratings yet
- Accion de Control ProporcionalDocument16 pagesAccion de Control Proporcionaldanisaiz01100% (1)
- Uniones de CableDocument6 pagesUniones de CableMiguelÁngelEspinosaNo ratings yet
- Protoboard: Guía completa para principiantesDocument20 pagesProtoboard: Guía completa para principiantesGenesis Espinoza0% (1)
- Tecnología ESO. Sagrado Corazón de Placeres (Pontevedra) - Materiales CerámicDocument10 pagesTecnología ESO. Sagrado Corazón de Placeres (Pontevedra) - Materiales CerámicjjrpgscribdNo ratings yet
- Theo JansenDocument3 pagesTheo JansenRonny SanchezNo ratings yet
- Theo JansenDocument3 pagesTheo Jansenvalentina chavezNo ratings yet
- Robot araña TheoDocument3 pagesRobot araña TheoLuis BastianNo ratings yet
- Reporte de Investigacion - Robot InsectoDocument5 pagesReporte de Investigacion - Robot Insectorgb.xyk1No ratings yet
- Práctica de Laboratorio 2Document5 pagesPráctica de Laboratorio 2fatimaNo ratings yet
- Rúbrica Laboratorio #2bDocument2 pagesRúbrica Laboratorio #2bJuan F ReyesNo ratings yet
- TrabajoPseu en PseIntDocument45 pagesTrabajoPseu en PseIntTommy De Carlos MaldonadoNo ratings yet
- Ejercicios CAMPO ELECTRICO PDFDocument67 pagesEjercicios CAMPO ELECTRICO PDFLandivar J MarcoNo ratings yet
- D. de Elementos MecanicosDocument10 pagesD. de Elementos MecanicosJaphet González BerronesNo ratings yet
- Circuitos Hidráulicos y NeumáticosDocument9 pagesCircuitos Hidráulicos y NeumáticosAlejandra OlmedoNo ratings yet
- Programación AvanzadaDocument11 pagesProgramación AvanzadaAlejandra OlmedoNo ratings yet
- Ciencia e Ingeniería de Los Materiales PDFDocument8 pagesCiencia e Ingeniería de Los Materiales PDFSaid Alvarado MoralesNo ratings yet
- D. de Elementos MecanicosDocument10 pagesD. de Elementos MecanicosJaphet González BerronesNo ratings yet
- EstáticaDocument11 pagesEstáticaSaulNo ratings yet
- Circuitos Hidráulicos y NeumáticosDocument9 pagesCircuitos Hidráulicos y NeumáticosAlejandra OlmedoNo ratings yet
- Micro ControladoresDocument10 pagesMicro ControladoresGilbert GonzalezNo ratings yet
- Control PDFDocument10 pagesControl PDFRicardo Perez DelgadoNo ratings yet
- RoboticaDocument12 pagesRoboticaDario RodriguezNo ratings yet
- Análisis de Circuitos EléctricosDocument9 pagesAnálisis de Circuitos EléctricosRaul DomínguezNo ratings yet
- Análisis de FluidosDocument8 pagesAnálisis de FluidosIsver GarciaNo ratings yet
- Reticula de Ingeniería Mecatrónica Actualizada PDFDocument1 pageReticula de Ingeniería Mecatrónica Actualizada PDFMario Popoca MtzNo ratings yet
- Perfil-Objetivo Ingenieria Mecatronica PDFDocument1 pagePerfil-Objetivo Ingenieria Mecatronica PDFGregorio HernandezNo ratings yet
- Planos Mecanismo Theo JansenDocument6 pagesPlanos Mecanismo Theo JansenFabian Blanco Piña67% (3)
- Administración y Contabilidad NewDocument7 pagesAdministración y Contabilidad NewEduardo Coral DiazNo ratings yet
- Clases 5 y 7 Agosto Fis 3Document25 pagesClases 5 y 7 Agosto Fis 3Andres GuevaraNo ratings yet
- Cuadro ComparativoDocument2 pagesCuadro ComparativoArmando Cruz Chavez70% (10)
- CodigoFactorizacionCholesky MN17A PDFDocument2 pagesCodigoFactorizacionCholesky MN17A PDFAndre FieeNo ratings yet
- Tabla de Conversión - Unidades de PresiónDocument3 pagesTabla de Conversión - Unidades de PresiónMartinez Gutierrez ReneNo ratings yet
- Tabla 2Document7 pagesTabla 2Gregorio HernandezNo ratings yet
- GUIA - T02 - Interaccion Electrica PDFDocument1 pageGUIA - T02 - Interaccion Electrica PDFGregorio HernandezNo ratings yet
- Lista de Cotejo de Investigación DocumentalDocument1 pageLista de Cotejo de Investigación DocumentalGregorio Hernandez100% (1)
- Tipos de SoftwareDocument6 pagesTipos de SoftwareGregorio HernandezNo ratings yet
- Tipos de Software 2Document11 pagesTipos de Software 2Gregorio HernandezNo ratings yet
- Ancieta If 2016Document119 pagesAncieta If 2016Vanessa PerezNo ratings yet
- Resumen Critico de Sus Dos ObrasDocument20 pagesResumen Critico de Sus Dos ObrasThalia AlbitresNo ratings yet
- INDU BAY GEN3 ProductSheet ESDocument6 pagesINDU BAY GEN3 ProductSheet ESJuan Adan Calle VNo ratings yet
- Ejercicios SecuenciaciónDocument7 pagesEjercicios SecuenciaciónroalNo ratings yet
- Unidad 1 Teorìa Del DelitoDocument7 pagesUnidad 1 Teorìa Del DelitoAura PeraltaNo ratings yet
- 6 1 3 Caso 2 Experiencia 6Document2 pages6 1 3 Caso 2 Experiencia 6Gustavo GarínNo ratings yet
- Test de Manejo de ConflictosDocument15 pagesTest de Manejo de Conflictosorientacion-escolar1No ratings yet
- Procedimiento para El Mtto. Preventivo y Correctivo CargadoresDocument26 pagesProcedimiento para El Mtto. Preventivo y Correctivo CargadoresAndres Gonzalez MartinezNo ratings yet
- Cálculo líneas carga roldanasDocument26 pagesCálculo líneas carga roldanasAlejandro ZuñigaNo ratings yet
- Sistemas de Producción de Rumiantes ParametrosDocument14 pagesSistemas de Producción de Rumiantes ParametrosCynthia Rebeca Monge-EguezNo ratings yet
- MS-01-176 - AntiretornoDocument17 pagesMS-01-176 - AntiretornoqmasdaNo ratings yet
- TUTORIAL para Fabricación Casera de BRIQUETAS para La Chimenea - Fernando Pagés LledóDocument2 pagesTUTORIAL para Fabricación Casera de BRIQUETAS para La Chimenea - Fernando Pagés LledólalyrieNo ratings yet
- Desintegracion Social en NicaraguaDocument18 pagesDesintegracion Social en NicaraguaVanessa Ijzm Pineda57% (7)
- ¡Tema Mítico! Un Toque de Realidad Contra El Mito Del Occidente GayerDocument28 pages¡Tema Mítico! Un Toque de Realidad Contra El Mito Del Occidente GayerÁlvaro GarcíaNo ratings yet
- Guia - de - Aprendizaje - AmbientalDocument12 pagesGuia - de - Aprendizaje - AmbientalValentinaNo ratings yet
- Tablas Internas de Tipo Rango en Programas ABAP - SCNDocument3 pagesTablas Internas de Tipo Rango en Programas ABAP - SCNCharlesNo ratings yet
- EtnografíaDocument7 pagesEtnografíaFran RizoNo ratings yet
- Garcia TECSUPDocument2 pagesGarcia TECSUPJC_RoseNo ratings yet
- Reseteo Audis NuevosDocument19 pagesReseteo Audis Nuevosasdfs7346No ratings yet
- Guía ZENERDocument6 pagesGuía ZENERLouis CharlesNo ratings yet
- Bombas de InfusionDocument15 pagesBombas de InfusionlucasNo ratings yet
- CE30180378872Document1 pageCE30180378872jose angel dominguezNo ratings yet
- Check list diario inspección arnes línea anclajeDocument1 pageCheck list diario inspección arnes línea anclajeAnderson Alejandro Benites ZelayaNo ratings yet
- Informe Del Osciloscopio DigitalDocument9 pagesInforme Del Osciloscopio Digitalfranco_3210_No ratings yet
- Cie Heinf 2016 1Document2 pagesCie Heinf 2016 1JuanCHoyosAlvaradoNo ratings yet
- DiplomadoDocument4 pagesDiplomadoEleida AzuajeNo ratings yet
- U00 Doc 024Document11 pagesU00 Doc 024Manuel VNo ratings yet
- Cuestionario Generalidades de La Defensa Integral de La NaciónDocument2 pagesCuestionario Generalidades de La Defensa Integral de La NaciónalejandraNo ratings yet
- 2023 Plan Operativo de Sec Acad 2020 - EntregaDocument9 pages2023 Plan Operativo de Sec Acad 2020 - EntregaMiguel Roberto HilarioNo ratings yet
- Procesos psicológicos básicos IIDocument33 pagesProcesos psicológicos básicos IImartinaNo ratings yet