Professional Documents
Culture Documents
Cours Electrotechnique Avancé e PDF
Uploaded by
Abderrahmane WardiOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Cours Electrotechnique Avancé e PDF
Uploaded by
Abderrahmane WardiCopyright:
Available Formats
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Chapitre 2 : Modélisation et commande de la machine asynchrone
triphasée en régime variable
Objectifs:
Modéliser la machine asynchrone dans le repère de Park,
Etablir les différents modèles de la machine en fonction des vecteurs de commande
choisis,
Etudier les différentes techniques de commande de l’onduleur de tension,
Simuler quelques grandeurs de la machine
Electrotechnique avancée Page : 12 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
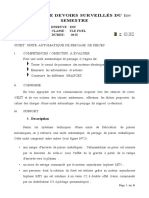
1. Description de la machine asynchrone triphasée à cage
La machine asynchrone triphasée est constituée d’un stator fixe et d’un rotor mobile séparé par
un entrefer. Dans des encoches internes réparties sur la face interne du stator sont logés trois
enroulements (phases) identiques, comportant 2p pôles, et sont déphasés d’un angle électrique
2π
de ( ).
3
Rotor
2' Stator
3
3 1
2' θ
1' 1
1'
2 3'
3'
2
Entrefer
Fig.2.1: Constitution de la machine asynchrone triphasée
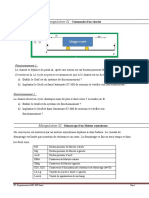
Fig.2.2: Vue éclaté d’un moteur asynchrone triphasé à cage
Electrotechnique avancée Page : 13 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
N° Désignation N° Désignation
1 Stator bobiné 27 Vis de fixation du capot
2 Carter 30 Roulement côté accouplement
3 Rotor 33 Chapeau intérieur côté accouplement
5 Flasque côté accouplement 38 Circlips de roulement côté accouplement
6 Flasque arrière 39 Joint côté accouplement
7 Ventilateur 50 Roulement arrière
13 Capot de ventilation 54 Joint arrière
14 Tiges de montage 59 Rondelle de précharge
21 Clavette 70 Corps de boîte à bornes
26 Plaque signalétique 74 Couvercle de boîte à bornes
Tableau 1 : Nomenclature des organes du moteur de la figure.2.2
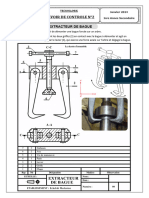
2. Répartition du champ magnétique dans l’entrefer de la machine
B1 (θ)
1' 1 1' 1
B 2 (θ)
2 2' 2 2' 2
B 3 (θ)
3 3' 3 3' 3
Fig.2.3: Répartition du champ magnétique dans l’entrefer
Electrotechnique avancée Page : 14 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
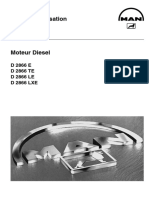
3. Représentation de la machine dans le repère (dq0)
Fig.2.4: Machine asynchrone triphasé dans le repère (dq0)
4. Hypothèses
On suppose que :
Le circuit magnétique de la machine asynchrone n’est pas saturé et qu’il n y a pas présence des
phénomènes d’hystérésis, donc les inductances deviennent constantes,
La répartition du champ magnétique dans l’entrefer de la machine est sinusoïdale,
L’effet de peau (pelliculaire) est négligeable, donc les résistances de la machine sont considérées
comme des constantes.
5. Représentation de la machine par leurs axes
c 3
vc v3
a
0 θ
va
2 1
v1
v2
vb
b
Fig.2.5: Machine asynchrone dans le repère (abc)
Electrotechnique avancée Page : 15 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
6. Relation des fréquences
H s (Champ de synchronis me)
ωg
H r (Rotor)
ωp dθ
ωr =
dt
0 Stator (Reférence )
Fig.2.6: Représentation des champs magnétiques
Le champ magnétique tournant H s crée par les phases du stator tourne à la pulsation (vitesse
électrique) dénotée ω p . Alors que le champ magnétique tournant H r crée par les phases du rotor
tourne par rapport à lui-même à la pulsation (vitesse électrique) dénotée w r .
Le rotor glisse par rapport au champ de synchronisme à une vitesse électrique relative notée ωg .
La condition des fréquences de la machine asynchrone en régime quelconque vaut
ωp ωr ωg
électriquement: ωp =ωr +ωg , et vaut mécaniquement: = + .
p p p
La condition des fréquences de la machine asynchrone en régime permanent sinusoïdale vaut
ωg
électriquement ω=ωr +ωg , et vaut mécaniquement: Ω s =Ω+ .
p
7. Equations de fonctionnement réelles de la machine asynchrone
Les équations de fonctionnement du moteur, par application de la loi de faraday sont :
Au stator :
dΦ a
v a =R si a + dt
dΦ b
v b =R si b + 2.1
dt
dΦ c
v c =R sic + dt
Electrotechnique avancée Page : 16 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Au rotor:
dΦ1
v1 =0=R r i1 + dt
dΦ 2
v 2 =0=R r i 2 + 2.2
dt
dΦ 3
v 3 =0=R r i3 + dt
L’écriture des équations précédentes sous une forme réduite (matricielle) est :
va ia Φ a
v =R . i + d Φ 2.3
b s b dt b
vc ic Φ c
v1 i1 Φ1
v = 0 =R . i + d Φ
2 r 2 dt 2 2.4
v3 i3 Φ3
Les équations des flux sont données par :
Φ abc = s .i abc + M sr .i123
2.5
Φ123 = M rs . iabc + r . i123
Avec
Φ a s Ms M s ia M a1 M a2 M a3 i1
Φabc = Φ b = M s s
M s . i b + M b1 M b2
M b3 . i 2 2.6
Φ c M s Ms s ic M c1 M c2 M c3 i3
Φ1 M a1 M b1 M c1 i a r Mr M r i1
Φ123 = Φ2 = M a2 M b2
M c2 . i b + M r r
M r . i 2 2.7
Φ3 M a3 M b3 M c3 i c M r Mr r i 3
La matrice de la mutuelle inductance est :
2π 2π
cos(θ) cos(θ+ ) cos(θ- )
3 3
2π 2π
M sr =M sr . cos(θ- ) cos(θ) cos(θ+ ) 2.8
3 3
2π 2π
cos(θ+ ) cos(θ- )
cos(θ)
3 3
T
Remarque: On a donc : M rs (θ) = M sr (-θ) = M sr (θ) .
Electrotechnique avancée Page : 17 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Les équations réduites du moteur en fonction des inductances et courants sont:
d d
v abc R s .i abc s dt i abc dt M sr .i123
2.9
v 0 R . i d i d M . i
123 r 123 r
dt
123
dt
rs abc
8. Equations de fonctionnement de la machine dans le repère de Park
dθp
Le repère de Park (dq0) tourne à une vitesse angulaire ( ω p = ). Les bobines du stator ainsi
dt
que le rotor sont portées par leurs axes.
c 3
vc v3
d
ids
vds
ωp
idr
vdr
θp
a
0 θ
va
1
2 v2
v1
vqr
i qr
vqs
vb
b i qs
Fig.2.7: Modèle équivalent de la machine asynchrone dans le repère diphasé tournant (dq0)
Electrotechnique avancée Page : 18 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
La matrice de Park est donnée par :
2π 4π
cos(θ p ) cos(θ p - 3 ) cos(θ p - 3 )
2 2π 4π
P(θ p ) = -sin(θ p ) -sin(θ p - ) -sin(θ p - ) 2.10
3 3 3
1 1 1
2 2 2
Equations des tensions et courants du stator:
La matrice de passage des grandeurs statoriques vers le repère de Park est P(θ p ) .
Alors que La matrice de passage des grandeurs rotoriques vers le repère de Park est P(θp -θ) .
v ds va
vsdq0 = v qs = P(θ p ) . v b = P(θ p ) . v abc
v v c
0s
2.11
i ds ia
i sdq0 i qs P(θ p ) . i b P(θ p ) . iabc
i ic
0s
On substitue les équations 2.11 dans 2.9, on obtient :
-1 d
vsdq0 =R s isdq0 + P(θ p ) s
P(θ p ) i abc +
dt
2.12
d
+ P(θ p )
-1
dt
-1
M sr P(θp ) i rdq0
Tout calcul fait, on trouve:
di ds didr
v ds =R si ds +Ls dt +M dt -ωp (Ls iqs +Mi qr )
di qs diqr
v qs =R si qs +Ls +M +ωp (Ls i ds +Midr ) 2.13
dt dt
di 0s
v 0s =R si 0s +Ls0 dt
Electrotechnique avancée Page : 19 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Equations des tensions et courants du rotor
Un raisonnement analogue au précédent, tout en utilisant la matrice passage P(θ p -θ) , conduit
à:
di dr di ds
v dr =0=R r i dr +L r dt +M dt -(ωp -ωr )(L r i qr +Mi qs )
di qr di qs
v qr =0=R r i qr +L r +M +(ωp -ωr )(Lr i dr +Mids ) 2.14
dt dt
di 0r
v 0r =0=R r i 0r +L r0 dt
Equations des flux de la machine asynchrone
Φ ds =Lsi ds +Mi dr
Φ dr =Lr i dr +Mids
Φ =L i +Mi 2.15
qs s qs qr
Φ qr =Lr i qr +Miqs
9. Repères usuels
Repère fixe lié au stator:
Ce repère est connu sous le nom référentiel de Concordia. La pulsation de Park vaut alors ω p =0 .
Ce référentiel permet d'étudier la variation importante de la vitesse de rotation associée ou non
avec la variation de la fréquence d'alimentation. Les équations respectivement du stator et du
rotor deviennent:
dids didr
v ds =R si ds +Ls dt +M dt
diqs diqr
v qs =R si qs +Ls +M 2.16
dt dt
di 0s
v 0s =R si 0s +Ls0 dt
didr dids
v dr =0=R r i dr +L r dt +M dt +ωr (L r i qr +Miqs )
diqr di
v qr =0=R r i qr +L r +M qs -ωr (Lr idr +Mi ds ) 2.17
dt dt
di 0r
v 0r =0=R r i 0r +L r0 dt
Electrotechnique avancée Page : 20 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Repère lié au rotor:
Ce référentiel peut être intéressant dans les problèmes de régimes transitoires où la vitesse de
rotation est considérée comme constante. La pulsation de Park vaut alors ω p =ωr .
Les équations respectivement du stator et du rotor deviennent:
di ds didr
v ds =R si ds +Ls dt +M dt -ωr (Ls i qs +Miqr )
di qs diqr
v qs =R si qs +Ls +M +ωr (Ls ids +Mi dr ) 2.18
dt dt
di 0s
v 0s =R si 0s +Ls0 dt
di dr di ds
v dr =0=R r i dr +L r dt +M dt
di qr di
v qr =0=R r i qr +L r +M qs 2.19
dt dt
di 0r
v 0r =0=R r i 0r +L r0 dt
Repère synchrone (lié au champ tournant):
Ce référentiel est utilisé pour l'étude des moteurs asynchrones alimentés par des tensions à
fréquence variable. La pulsation vaut alors ( ω p =ωs ). Les équations respectivement du stator et
du rotor deviennent:
di ds didr
v ds =R si ds +Ls dt +M dt -ωs (Ls i qs +Miqr )
di qs diqr
v qs =R si qs +Ls +M +ωs (Ls ids +Mi dr ) 2.20
dt dt
di 0s
v 0s =R si 0s +Ls0 dt
di dr di ds
v dr =0=R r i dr +L r dt +M dt -(ωs -ωr )(Lr i qr +Mi qs )
di qr di qs
v qr =0=R r i qr +L r +M +(ωs -ωr )(L r idr +Mids ) 2.21
dt dt
di0r
v 0r =0=R r i 0r +L r0 dt
Electrotechnique avancée Page : 21 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
10. Equations complexes de la machine dans le repère du Park
i qs
Ls v qs
ωp
M
i qr
Lr v qr
M
Lr Ls d
0
i dr i ds
v dr
v ds
Fig.2.8: Modèle de la machine asynchrone dans le repère diphasée tournant (dq0)
L’axe « d » est considéré comme axe réel, alors que l’axe « q » est considéré comme axe
imaginaire. Par conséquent on peut écrire respectivement les équations du stator et du rotor par :
vs =v ds +jv qs
is =i ds +ji qs
Φs =Φ ds +jΦ qs
2 .22
v r =v r +jv qr
ir =i dr +ji qr
Φ r =Φ dr +jΦqr
Les équations précédentes en fonction des flux de la machine dans le repère de Park s’écrivent
alors :
dΦ s
vs =R s is + dt +jωp Φs
2.23
v =0=R i + dΦ r +j(ω -ω )Φ
r r r
dt
p r r
Electrotechnique avancée Page : 22 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Ou bien encore en fonction des courants s’expriment par:
d is di
vs =R s is +Ls +M r +jωp (Ls is +M ir )
dt dt
2.24
v =0=R i +L d ir +M d is +j(ω -ω )(L i +M i )
r r r r
dt dt
p r r r s
11. Schémas électriques équivalent en régime quelconque
Circuit d’axe direct « d » :
ωp Φ qs L rf
i ds Rs L sf Rr i dr
i md
d dm
v ds (ωp -ωr )Φqr
dt
dids dΦ dm
v ds =R si ds +Lsf dt + dt -ωp Φ qs
2.25
v =0=R i +L didr + dΦ dm -(ω -ω )Φ
dr r dr rf
dt dt
p r qr
Circuit d’axe transversal « q » :
i qs L sf ω p Φ ds L rf
Rs Rr i qr
i qm
v qs d qm
(ωp -ωr )Φdr
dt
diqs dΦ qm
v qs =R si qs +Lsf + +ωp Φ ds
dt dt 2.26
v =0=R i +L di qr + dΦ qm +(ω -ω )Φ
qr r qr rf
dt dt
p r dr
Electrotechnique avancée Page : 23 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Circuit d’axe homopolaire «0 » :
i 0s Rs i 0r Rr
v 0s v 0r L r0
L s0
12. Expressions du couple électromagnétique
Le couple électromagnétique est né suite à l’interaction entre les champs magnétiques du rotor et
du stator. Il est définit à partir de la puissance mécanique.
dPm dP dM sr (θ) T
Te = =p m =p is ir 2.27
dθm dθ dθ
Expression du couple en fonction des courants
Te =pM I m ( is ir * ) =pM(iqsidr -i dsiqr ) 2.28
Expression du couple en fonction des grandeurs du rotor
Te =p I m (Φ r ir * ) =p(Φ qr i dr -Φ dr i qr ) 2.29
Expression du couple en fonction des grandeurs du stator
Te =-p Im (Φs is * ) =p(Φ dsiqs -Φ qsids ) 2.30
Expression du couple en fonction des grandeurs du stator et du rotor
pM pM
Te =
Lr
I m (Φ r is * ) =
Lr
(Φ dr iqs -Φ qr ids )
2.31
pM pM
Te =
σLs L r
Im (Φ r Φ*s ) =
σLs L r
(Φdr Φ qs -Φ qr Φds )
Electrotechnique avancée Page : 24 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
13. Modèles d’état de la machine asynchrone alimentée en tension
La mise en équation d’état de la machine asynchrone est liée au type d’alimentation et au choix
de vecteur d’état. En général, on alimente la machine par une source de tension si elle est de
moyenne puissance, et on l’alimente par une source de courant si elle est de forte puissance.
Le modèle mathématique de la machine s’écrit sous la forme d’une équation d’état non linéaire
dans le repère de Park. Toute en transformant les équations 2.13 et 2.14 de la machine
asynchrone sous la forme d’équation d’état de la manière suivante:
X • = A X + B U
Y = C X
Avec
A : Matrice d’état du modèle;
B : Matrice de commande d’état du modèle ;
C : Matrice d’observation du modèle ;
U : Vecteur des entrées de commande et des perturbations ;
X : Vecteur des variables d’état du modèle ;
Y : Vecteur de mesure du modèle.
Modèle d' état
Tr
de la machine
U Y
asynchrone
Fig.2.9: Schéma bloc du modèle de la machine asynchrone
Electrotechnique avancée Page : 25 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
T
Vecteur d’état : X = i ds ; i qs ; i dr ; iqr
di ds 1 M M 1
- (σωp +(1-σ)ωr ) ωr L 0
dt τs τr Ls Ls
s
di qs 1 M M i ds 1
- (σωp +(1-σ)ω r ) - - ωr 0
dt 1 τs Ls τ r Ls i qs 1
Ls vds
= +
di dr σ M M 1 i σ M v
- ωr - σωp -ωr dr - 0 qs
dt L r τs Lr τr
di i qr Ls L r
qr M M 1 M
ωr -σωp + ωr - 0 -
dt L τs L r τr Ls L r
r
Vecteur de mesure du modèle:
i ds
i ds 1 0 0 0 i qs
Y = i = 0 1 0 0 . i
qs dr
i qr
M
Couple électromagnétique de la machine: Te =pM(iqsi dr -idsiqr )=p (Φ dr iqs -Φ qr ids )
Lr
dΩ dω
Equation mécanique de la machine: J =Te -Tr -fΩ J r =pTe -pTr -fωr
dt dt
Electrotechnique avancée Page : 26 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
T
Vecteur d’état: X = Φ ds ; Φ qs ; Φ dr ; Φ qr
dΦ ds 1 M
-τ σωp 0
dt τs L r
s
dΦ qs 1 M Φ ds 1 0
-σωp - 0
dt 1 τs τ s L r Φ qs 0
1 vds
= +
Φ dr 0
dΦ dr σ M 0 -
1
σ(ωp -ωr )
0 vqs
dt
τ r Ls τr Φ qr 0 0
dΦ
qr M 1
0 -σ(ω p -ωr ) -
dt τ r Ls τr
Vecteur de mesure du modèle:
1 1-σ Φ ds
0 0
1L
i M Φ
Y = ids = s qs
qs σ 0 1 1-σ Φ dr
0
Ls M Φ qr
pM
Couple électromagnétique de la machine: Te = (Φ qsΦ dr -Φ ds Φ qr ) .
σLs Lr
dΩ dω
Equation mécanique de la machine: J =Te -Tr -fΩ J r =pTe -pTr -fωr .
dt dt
Ce modèle est utilisé pour orienter le flux rotorique: r .
Electrotechnique avancée Page : 27 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
T
Vecteur d’état: X = Φ ds ; Φ qs ; i ds ; i qs
dΦds
dt 0 σωp -σR s 0 1 0
-σω Φ
dΦqs p 0 0 -σR s
ds 0 1
dt 1 1 ωr 1 1 Φ qs 1 v ds
= -( + ) σ(ωp -ωr ) + 0
dids σ τ r Ls Ls τ r τs i ds σL s v qs
dt ωr 1 1 1 i 1
di - σ(ωp -ωr ) -( + ) qs 0
qs Ls τ r Ls τ r τs σLs
dt
Vecteur de mesure du modèle:
Φ ds
i ds 0 0 1 0 Φ qs
Y = i = 0 0 0 1 i
qs ds
i qs
p
Couple électromagnétique de la machine: Te = (i qsΦ ds -i ds Φ qs ) .
Lr
dΩ dω
Equation mécanique de la machine: J =Te -Tr -fΩ J r =pTe -pTr -fωr
dt dt
Ce modèle est utilisé pour orienter le flux statorique: Φ s .
Electrotechnique avancée Page : 28 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
T
Vecteur d’état : X = i ds ; i qs ; Φ dr ; Φ qr
di ds 1 1 (1-σ) (1-σ)
dt -( τ + (1-σ) τ ) σω p
Mτ r M
ωr
s r 1
L 0
di 1 1 (1-σ) (1-σ) ds i
qs -σω p -( +(1-σ) ) - ωr s
dt 1 τs τr M Mτ r i qs 1 1 vds
= + 0
dΦ dr σ σM σ Φ σ L s vqs
0 - σ(ωp -ωr ) dr
dt τr τr 0 0
dΦ Φ qr
qr σM σ 0 0
0 -σ(ω p - ωr ) -
dt τr τr
Vecteur de mesure du modèle:
i ds
i ds 1 0 0 0 i qs
Y = i =
qs 0 1 0 0 Φ dr
Φ qr
pM
Couple électromagnétique de la machine: Te = (i qsΦ dr -ids Φ qr ) .
Lr
dΩ dω
Equation mécanique de la machine: J =Te -Tr -fΩ J r =pTe -pTr -fωr .
dt dt
Ce modèle est utilisé pour orienter le flux rotorique: r .
Electrotechnique avancée Page : 29 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
13.1. Simulation du modèle dans un repère lié au stator
Les équations de la machine asynchrone (fonctionnement moteur), tout en supposant qu’elle est
symétrique et équilibrée. Après un développement du calcul, on trouve:
diαs 1 M M 1
- (1-σ)ωr ωr L 0
dt τs τ r Ls Ls
s
1 M M i 1
diβs -(1-σ)ωr - - ωr
αs
0
dt 1 τs Ls τ r Ls iβs 1 Ls vαs
= +
αr σ M
di M 1 iαr σ M vβs
- ωr - -ωr - 0
dt
di τ s Lr Lr τr iβr Ls Lr
βr M M 1 M
ωr ωr - 0 -
dt τs Lr τr
Lr Ls L r
Vecteur de mesure du modèle:
ids
i ds 1 0 0 0 iqs
Y = i = 0 1 0 0 i
qs dr
iqr
Matrice de passage (Concordia):
1 1 v
0 - - a
v αs 2 2 2
= vb
vβs 3 3 3
1 - v
2 2 c
pM
Couple électromagnétique de la machine: Te =pM(iαr iβs -iβr iαs )= (Φαr iβs -Φβr i αs ) .
Lr
dΩ dω
Equation mécanique de la machine: J =Te -Tr -fΩ J r =pTe -pTr -fωr .
dt dt
Electrotechnique avancée Page : 30 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Schéma de simulation:
v αs T
Résolution i αs ; i βs ; i αr ; iβr 2 i abc
v abc 3 de l' équation
vβs
2 d' état 3
ωr
Calcul du
couple
Te
Résolution
de l' équation Tr
mécanique
Ω
p
Fig.2.10: Schéma du modèle de la MAS dans un repère lié au stator alimentée en tension
Electrotechnique avancée Page : 31 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Vecteur d'état : X T = isα ; i sβ ; i rα ; i rβ ; ω r
60 200
40
Tr(Nm)
is
0
20
0 -200
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
200 200
Te(Nm)
100
is
0
0
-100 -200
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
200 200
(rad/s)
100 ir 0
0 -200
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
500 200
vs
ir
0 0
-500 -200
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
Temps(s) Temps(s)
Fig.2.11: Allures des grandeurs vs ; Tr ; Te ; ; is ; is ; ir et ir
Electrotechnique avancée Page : 32 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Vecteur d'état : X T = i sα ; isβ ; rα ; rβ ; ωr
20 200
Tr(Nm)
is
10 0
0 -200
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
200 200
(rad/s)
is
100 0
0 -200
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
200 1
Te(Nm)
100
r
0
0
-100 -1
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
500 1
r
vs
0 0
-500 -1
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
Temps(s) Temps(s)
Fig.2.12: Allures des grandeurs vs ; Tr ; Te ; ; is ; is ; r et r
13.2. Simulation du modèle de la machine dans un repère lié au champ tournant
L’équation d’état du modèle de la machine alimentée en tensions est donnée par:
di ds 1 M M 1
- (σωs +(1-σ)ωr ) ωr L 0
dt τs τ r Ls Ls
s
di qs 1 M M ids 1
-(σωs +(1-σ)ωr ) - - ωr 0
dt 1 τs Ls τ r Ls iqs 1 Ls vds
= +
di
dr σ M M 1 i σ M v
- ωr - (σωs -ωr ) dr - 0 qs
dt τ s Lr Lr τr
iqr Ls L r
di qr M M 1 M
ωr -σωs + ωr - 0 -
dt Lr τsLr τr Ls L r
Electrotechnique avancée Page : 33 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Matrice de passage:
2π 2π v
cos(θ s ) cos(θ s - ) cos(θ s + ) a
v ds 2 3 3
= vb
v qs 3
-sin(θ s )
2π
-sin(θ s - )
2π
-sin(θs + ) v c
3 3
pM
Couple électromagnétique de la machine: Te =pM(iqsi dr -idsiqr )= (i qs Φ dr -ids Φ qr ) .
Lr
dΩ dω
Equation mécanique de la machine: J =Te -Tr -fΩ J r =pTe -pTr -fωr .
dt dt
v ds
v abc 3
Résolution i ds i qs i dr i qr
T
2 i abc
v qs de l' équation
2 d' état 3
ωs θs
ωs ωr θs
Calcul de la
position du stator
θ s = ωs .dt
Calcul du
couple
Te
Résolution
de l' équation Tr
mécanique
ωr
Fig.2.13: Schéma du modèle de la MAS dans un repère lié au champ tournant alimentée en
tension
Electrotechnique avancée Page : 34 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
30 400
300
20
vitesse wr
Couple Tr
200
100
10
0
0 -100
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
Temps(s) Temps(s)
200
100
v1
-100
-200
0 0.1 0.2 0.3 0.4 0.5
Temps(s)
Fig.2.14: Allures des grandeurs v1, Tr et wr
0 50
-20
0
-40
ids
iqs
-60 -50
-80
-100
-100
-120 -150
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
Temps(s) Temps(s)
150 150
100 100
idr
iqr
50 50
0 0
-50 -50
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
Temps(s) Temps(s)
Fig.2.15: Allures des grandeurs ids, iqs, idr et iqr
Electrotechnique avancée Page : 35 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
14. Commande en courant de la machine asynchrone triphasée
Le modèle mathématique de la machine asynchrone alimentée en courant s’écrit sous la forme
d’une équation d’état non linéaire dans le repère de Park ; en fonction du vecteur d’état du
modèle choisi.
Vecteur d’état: X Φ dr ; Φ qr T
dΦ dr -1
(ω p - ωr )
M
0
dt τr Φ τ i
= dr + r ds
dΦ qr -(ω - ω ) 1 Φ qr M i qs
p r - 0
dt τ r τ r
pM
Couple électromagnétique de la machine : Te = (Φ dr iqs -Φ qr ids ) .
Lr
Ce modèle est utilisé pour orienter le flux rotorique: r .
Modèle de la machine asynchrone dans le repère de Concordia:
dΦ αr - 1
-ωr
dt τ Φ i
= r αr + M 1 0 αs
dΦβr ω 1 Φ τ 0 1 iβs
r - βr r
dt τr
Modèle de la machine asynchrone dans un repère lié au champ tournant:
dΦ dr -1
(ωs - ω r )
dt τr Φ i
= dr + M 1 0 ds
dΦ qr -(ω - ω ) 1 Φ qr τ r 0 1 i qs
s r -
dt τ r
Modèle de la machine asynchrone dans le repère lié au rotor:
dΦ dr
dt 1 1 0 Φ dr M 1 0 i ds
=- +
dΦ qr τr 0 1 Φ qr τr 0 1 i qs
dt
Electrotechnique avancée Page : 36 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
T
Vecteur d’état: X = idr ; i qr
di dr -1
(ω p -ω)
0
M
(ω p -ω r )
M
-
0 di ds
dt T i L r i ds L r
= r dr
. + . + . dt
di qr -(ω -ω) -
1 i qr
-(ωp -ωr )
M
0
i qs M di
- qs
p
Tr Lr 0 L r dt
dt
Couple électromagnétique de la machine: Te =pM(i dr .i qs -ids .i qr )
Ce modèle est utilisé pour orienter le flux rotorique: r .
Modèle de la machine asynchrone dans le repère de Concordia:
Dans le repère de Concordia on a : Is =Is e jωs t , on obtient alors :
di αs
dt 0 -ωs i αs .
=
diβs ωs 0 iβs
dt
Par conséquent le modèle est donné par :
di αr - 1
-ωr
dt τ i i
= r αr + M (ωs -ω r ) 0 1 αs
diβr ω 1 i
- βr
Lr -1 0 i βs
r
dt τr
Modèle de la machine asynchrone dans un repère lié au rotor:
Dans un repère lié au rotor on a : I s =I s .e j( ωs -ωr )t , on obtient alors:
di ds
dt 0 1 i ds .
=(ωs -ωr )
di qs 1 0 i qs
dt
Par conséquent le modèle est donné par:
di dr
dt 1 1 0 i dr M 0 1 i ds
=- i +(ωs -ω r )
di qr τr 0 1 qr L r 1 0 i qs
dt
Electrotechnique avancée Page : 37 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
T
Vecteur d’état: X = Φ ds ; Φ qs
dΦ ds - 1
(ωp - ω r )
Ls
-σLs (ωp -ωr ) di ds
dt τr Φ ds τr ids 1 0 dt
= + +σLs
dΦ qs -(ω - ω ) 1 Φ qs Ls iqs 0 1 di qs
p r - σL s (ωp -ω r )
dt τr τr dt
Couple électromagnétique de la machine: Te =pM(Φqsi qs -Φqsi ds ) .
Ce modèle est utilisé pour orienter le flux statorique: s .
Modèle de la machine asynchrone dans le repère de Concordia:
dΦ αs - 1
-ωr
Ls
-σLs (ωs -ω r )
dt τ Φ αs τr i
= r + αs
dΦβs ω 1 Φ Ls iβs
r - βs σLs (ωs -ω r )
dt τr τr
Modèle de la machine asynchrone dans un repère lié au rotor:
dΦ ds Ls
-σL s (ωs -ωr )
dt 1 1 0 Φ ds τr i
=- Φ + ds
dΦ
qs τr 0 1 qs σL (ω -ω ) Ls i qs
s s r
dt τr
14.1. Simulation du modèle de la machine dans un repère lié au stator
L’équation d’état de la machine asynchrone alimentée en courants est donnée par:
di αr - 1
-ωr
dt τ i i
= r αr + M (ωs -ω r ) 0 1 αs
diβr ω 1 i
- βr
Lr -1 0 i βs
r
dt τr
Matrice de passage (Concordia):
1 1 i
1 - - a
iαs 2 2 2
= ib
iβs 3 3 3
0 - i
2 2 c
Couple électromagnétique de la machine: Te =pM(iβs .iαr -i αs .iβr ) .
dΩ dω
Equation mécanique de la machine: J =Te -Tr -fΩ J r =pTe -pTr -fωr .
dt dt
Electrotechnique avancée Page : 38 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Schéma de simulation:
i αs T
Résolution i αs ; iβs ; iαr ; iβr
i abc 3 de l' équation
iβs
2 d' état
ωr
Calcul du
couple
Te
Résolution
de l' équation Tr
mécanique
Ω
p
Fig.2.16: Schéma de simulation de la machine asynchrone dans un repère lié au stator alimentée
en courants
Electrotechnique avancée Page : 39 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Résultat de la simulation:
800 40
600 30
vitesse wr
Couple Tr
400 20
200 10
0 0
0 0.2 0.4 0.6 0.8 0 0.2 0.4 0.6 0.8
Temps(s) Temps(s)
100 100
50 50
idr
iqr
0 0
-50 -50
-100 -100
0 0.2 0.4 0.6 0.8 0 0.2 0.4 0.6 0.8
Temps(s) Temps(s)
Fig.2.17: Allures des grandeurs Tr, ir , ir et r
Electrotechnique avancée Page : 40 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
15. Modélisation de l’onduleur triphasé de tension
i T1 iT 2 iT 3
D1 D2 D3
C1 T1 C2 T2 C3 T3
VDC i D1 i D2 i D3
2 i1
1
u 12 Masy
0 2 N
3~
3
VDC i T '2
v1
i T'1 i T '3
2 D'1 D'2 D'3
C4 T'1 T'2 C6 T' 3
C5
i D'1 i D '2 i D' 3
Fig.2.18: Schéma de principe d’un onduleur de tension triphasé alimentant une machine
asynchrone triphasée
L’onduleur triphasé est formé par trois bras, dont chacun comporte deux interrupteurs de
puissance bidirectionnels en courant. Les clés de commande des interrupteurs de puissance sont
notées par Ci.
Modèle de l’onduleur triphasé:
Les trois tensions simples et composées à la sortie de l’onduleur sont données par :
v1 2 -1 -1 C1 u12 1 -1 0 C1
v = VDC -1 2 -1 C u =V 0 1 -1 C 2.35
2 3 2 23 DC 2
v3 -1 -1 2 C u 31 -1 0 1 C
3 3
Vecteur de tension de l’onduleur dans le repère de Concordia:
2 1 3
Vs =Vd +jVq = VDC (2C1 -C 2 -C3 )+j (C 2 -C3 )
3 2 2
v1 2.36
2 2
Vs =Vd +jVq = VDC 1 a a v 2
3
v 3
Electrotechnique avancée Page : 41 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Vs =Vd +jVq C1 C2 C3 VK
0 0 0 0 V1
0 1 1 1 V7
2 1 0 0 V1
VDC
3
2 1 3 1 1 0 V2
VDC ( +j )
3 2 2
2 1 3 0 1 0 V3
VDC (- +j )
3 2 2
2 0 1 1 V4
- VDC
3
2 1 3 0 0 1 V5
- VDC ( +j )
3 2 2
2 1 3 1 0 1 V6
VDC ( -j )
3 2 2
Le vecteur tension à la sortie de l’onduleur dans le repère lié au stator est donné par:
π
2 j(k-1)
3
Vk = 3 VDC e ; k (1..6) 2.37
V0 =V7 =0
300
V3 (010) V2 (110)
200
100
V4 (011) V1 (100)
0
V7 (111) V0 (000)
-100
-200
V5 (001) V6 (101)
-300
-400 -300 -200 -100 0 100 200 300 400
Fig.2.19: Les vecteurs des tensions alimentant la machine
Electrotechnique avancée Page : 42 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
L’onduleur délivre six vecteurs de tensions non nuls et deux autres vecteurs nuls.
300
90 V3 (010) V2 (110)
400
120 60
300 200
V3 V2
150 200 30
100
100
V4 (011) V1 (100)
0
180 V4 V1, 0 V7 (111) V0 (000)
-100
210 330
V5 V6 -200
240 300 V5 (001) V6 (101)
-300
270 -400 -300 -200 -100 0 100 200 300 400
Fig.2.20: Vecteurs de tensions de l’onduleur de tension
16. Techniques de commande de l’onduleur triphasé de tension
Il existe plusieurs types de commande l’onduleur à savoir :
MLI intersective (MLI avec porteuse ; MLI avec critères harmoniques…..),
MLI vectorielle.
16.1. MLI intersective
Les tensions modulantes (a, b et c) représentent les tensions images de système des tensions
triphasés simples. La porteuse p(t) est un signal triangulaire dont la fréquence (fp>> fa).
Ell est caratérisée par l’indice de modulation (m) et le profondeur de modulation(r) :
fp Vp
m= ; r= .
fa Va
p(t)
C1
a
C2
b
C3
c
Fig.2.21: Principe de la commande d’un MLI intersective
Electrotechnique avancée Page : 43 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
16.2. MLI vectorielle
Elle consiste à appliquer à la machine un vecteur de commande (référence) parmi les vecteurs
générés ci-dessous par l’onduleur.
π
2 j(K-1)
3 =V .e jθ k
VK = 3 VDC .e max ; K (1..6)
V0 =V7 =0
Il se trouve que l’application de ce vecteur de référence est située entre deux vecteurs
consécutifs générés par l’onduleur, comme l’indique la figure ci-dessous:
Pour commander la machine, il suffit d’appliquer la valeur moyenne de ces deux vecteurs:
TK .VK +TK+1.VK+1
Vref = .
TE
q
VK 1
Vref
ref
π
ξ VK
3
0 d
Fig.2.22: Principe de la MLI vectorielle
Tk ; TK 1 : Temps d’application des vecteurs consécutifs. TE : Période d’échantillonnage,
Vref
ρ= : Rapport des amplitudes. Les temps de commande des vecteurs consécutifs et le temps
Vmax
d’application de deux vecteurs nuls sont données par:
2ρTE
TK = 3 sin(ξ)
2ρTE π
TK+1 = sin( -ξ) 2 .38
3 3
T0
Electrotechnique avancée Page : 44 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
La période d’échantillonnage vaut alors TE =TK +TK+1 +2T0
Algorithme de la MLI vectorielle:
Début
456 123
Vs 0
45 56 23 12
Vsα 0 Vsα 0
Vs 3 .Vsα Vs 3.Vsα Vs 3.Vsα
Vs 3.Vsα
Secteur 5 Secteur 4 Secteur 5 Secteur 6 Secteur 3 Secteur 2 Secteur 1 Secteur 2
Fig.2.23: Algorithme de décision dans le repère (0)
500
400 Vref
VD 400 VD
Vref
300 V3 V2
300 V2
V3
200
200
100
100
VQ VQ
0 V4 0 V4
V1 V1
-100 -100
-200 -200
V5 V6
V5 V6
-300 -300
-400 -300 -200 -100 0 100 200 300 400 -400 -300 -200 -100 0 100 200 300 400
Fig.2.24: Vecteur de commande Vref dans le repère (0)
Electrotechnique avancée Page : 45 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
16.3. MLI multinivaux
On va traiter le cas d’un onduleur de tension triphasé à trois nivaux.
i
D1 C 11 D2 C 21 D3 C 31
VDC
2 C12 C 22 C 32
1 2
0 3
VDC D 1' D '2 D 3'
2
u 12
Masy
3~
Fig.2.25: Onduleur de tension triphasé à 3 nivaux
MLI intersective:
Les tensions modulantes (a, b et c) représentent les tensions images de système des tensions
triphasés simples. Les porteuses p(t) et –p(t) sont complémentaires.
La porteuse est caratérisée par l’indice (m) et le profondeur (r).
Electrotechnique avancée Page : 46 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
p(t)
a
C11
b C21
c
C31
C12
C22
C32
- p(t)
Fig.2.26: Commande MLI intersective de l’onduleur à trois nivaux
Résultat de la simulation:
Les grandeurs de la porteuse: Vp =50V ; f p =5kHz ,
Les grandeurs des modulantes: Vm =5V ; f m =50Hz ,
La tension d’alimentation de l’onduleur: VDC =200V .
Electrotechnique avancée Page : 47 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
150
100
50
v1
0
-50
-100
-150
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
Temps(s)
Fig.2.27: Allure de la tension simple v1
17. Commande du moteur asynchrone triphasé par onduleur MLI de tension en
boucle ouverte dans le repère de Concordia
f p 1kHz
Commande f m 50Hz
C123
v abc i sα
VDC 500V v DS v QS
Onduleur_M LI_ 3 ~ 3
Transformation : i sβ
2 Masyn_3 ~
s
Tr s
Electrotechnique avancée Page : 48 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
Résultat de la simulation :
500
vds
0
-500
0 0.1 0.2 0.3 0.4 0.5
Temps(s)
1 1
Phi-QS
Phi-DS
0 0
-1 -1
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
Temps Temps
200 200
iQS
iDS
0 0
-200 -200
0 0.1 0.2 0.3 0.4 0.5 0 0.1 0.2 0.3 0.4 0.5
Temps Temps
200
100
0
0 0.1 0.2 0.3 0.4 0.5
Temps(s)
Fig.2.28: Allures des grandeurs Tr ; VDS ; s ; s ; is ; is et
Electrotechnique avancée Page : 49 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
18. Commande vectorielle de la machine asynchrone à flux orienté
Le couple électromagnétique instantané dans le repère (dq0) est non découplé c'est-à-dire, il
pM pM
s’écrit sous la forme Te =
Lr
*
Im (Φ r is ) =Lr
(Φ dr i qs -Φ qr ids ) .
On voit bien que c’est le résultat de deux couples d’une machine à courant continu:
v ds v qs ωp
ωr
Machine synchrone
dr i qs qr i ds
Te
M cc1 M cc2
Fig.2.29: Modèle de la machine asynchrone
En réalité, il existe plusieurs stratégies de commande, suivant le modèle de la machine adopté et
suivant les grandeurs de référence choisies.
18.1. Orientation du flux rotorique
On va annuler la composante du flux ( Φ qr =0 ), et on considère que le flux réelle de la machine
coïncide avec l’axe « d » du repère de Park, on a donc ( Φ dr =Φ r ).
On obtient donc l’expression du couple d’une machine à courant continu à grandeurs
pM
découplés: Te = (Φdr i qs ) .
Lr
Electrotechnique avancée Page : 50 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
q
d
Φ dr =Φ r
Axe rotor (1)
θr
θp
θ
α Axe stator (a)
0
Fig.2.30: Orientation du flux rotorique suivant l’axe d
18.2. Estimateur de flux du rotor
En général les grandeurs statoriques sont accessibles, pour cette raison, on va déterminer
l’expression du flux du rotor en fonction des grandeurs statoriques.
dΦ dr
v dr =0=R r i dr + dt -(ωp -ωr )Φ qr
dΦ qr
v qr =0=R r i qr + dt +(ωp -ωr )Φdr
Φ qr =L r iqr +Miqs
Φ dr =L r idr +Mids
dΦ dr Φ -M.ids dΦ dr
A partir de cette expression on obtient: R r .idr + =R r .( dr )+ =0 .
dt Lr dt
M
D’où : Φ dr -est = .i ds .
1+τr .p
Electrotechnique avancée Page : 51 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
18.3. Estimateur de l’ange de Park p
A partir des équations suivantes, on peut déduire les estimateurs de « p et p ».
Φ qr =0=L r iqr +Miqs
dΦ qr
v qr =0=R r i qr + +(ωp -ωr )Φ dr
dt
M M
On a 0=R r i qr +(ωp -ωr )Φ dr =- i qs +(ωp -ωr )Φ dr . D’où : ωg-est = i qs .
τr τ r Φ dr-est
M
Soit θ g-est = ( iqs )dt , soit θ p-est =θ g-est +θ r .
τ r Φ dr -est
18.4. Modèle de la machine asynchrone à flux orienté
M
Les flux du stator ont pour expressions: Φ ds =σLsids + Φ dr et Φ qs =σLs .i qs .
Lr
Par conséquent les tensions du stator ont pour expressions:
(1+τr p) M
v ds = (R s +σLs p) + p Φ dr -ωp σLsi qs
M Lr
v =(R +σL p)i +ω σLs (1+τ r p) + M Φ
qs s s qs p dr
M Lr
Le flux du rotor et le courant transversal du stator ont pour expressions:
1
Φ dr = (1+τ r p) M
(v ds +ωp σLsi qs )
(R s +σLs p) M + L p
r
1 σLs M
i qs = v qs -ωp (1+τ r p)+ Φ dr
(R s +σLs p) M Lr
Elles sont modélisées par le schéma bloc suivant:
v ds dr
Modéle MAS
v qs i qs
Fig.2.31: Bloc du modèle de la machine asynchrone à flux rotorique orienté
Electrotechnique avancée Page : 52 Proposé par M : SOYED Abdessami
Chapitre 2 : Modélisation et commande de la machine asynchrone triphasée en régime variable
18.5. Modèle de la machine asynchrone à flux rotorique orienté
VDC
v ds
Φdr-cde
PI
vabc-ond
P(θ p )
v qs
i qs-cde
PI
σL (1+τ r p) M ωp σLs
ωp s + i as
M Lr iqs-est
-1
P(θ p ) i bs
ids-est
MAS
M
Φ dr-est = ids θr
1+τr p
dr-est
θ p-est =θ g-est +θ r
Fig.2.32: Modèle de la machine asynchrone à flux du rotor orienté
Electrotechnique avancée Page : 53 Proposé par M : SOYED Abdessami
You might also like
- Chapitre 2 Machines SynchronesDocument13 pagesChapitre 2 Machines Synchronesaicha elmamouniNo ratings yet
- III.2.1 Résultat de Simulation III.2.1.1 Cas D'un Modèle Global Multi Enroulements A. Cas D'une Machine SaineDocument22 pagesIII.2.1 Résultat de Simulation III.2.1.1 Cas D'un Modèle Global Multi Enroulements A. Cas D'une Machine SaineHudaNo ratings yet
- ChiiDocument20 pagesChiiNedjmeddine ZemNo ratings yet
- 4 Sc Tech-dt-11-12-Systeme Automatique de MoulageDocument3 pages4 Sc Tech-dt-11-12-Systeme Automatique de MoulageezzineNo ratings yet
- Electrotechnique 2 GET - Chap III - Machine SynchroneDocument13 pagesElectrotechnique 2 GET - Chap III - Machine Synchronerajaa latifiNo ratings yet
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabriceNo ratings yet
- Exercices Sur Les Trains ÉpicycloïdauxDocument4 pagesExercices Sur Les Trains Épicycloïdauxwalid100% (9)
- Série de TD N°3 MONTE CHARGE A BASE D'UN MOTEUR ASYNCHRONE TRIPHASE+solDocument6 pagesSérie de TD N°3 MONTE CHARGE A BASE D'UN MOTEUR ASYNCHRONE TRIPHASE+sollamine fayNo ratings yet
- Chapitre Commande MASDocument9 pagesChapitre Commande MASjunior NgoyoNo ratings yet
- S2I CCP TSI 2005 GE (Enoncé)Document6 pagesS2I CCP TSI 2005 GE (Enoncé)FZLNo ratings yet
- 3L-NPC With GASDEDocument7 pages3L-NPC With GASDEhamza mesaiNo ratings yet
- dc2 NRDocument6 pagesdc2 NRrayenk690No ratings yet
- Chapitre 8 Machine Asynchrone TriphaseeDocument15 pagesChapitre 8 Machine Asynchrone TriphaseeWided MaghraouiNo ratings yet
- Electrotechnique Analytique - Machine Synchrone PDFDocument61 pagesElectrotechnique Analytique - Machine Synchrone PDFseye abdou aziz100% (1)
- Memoire Finaleee3Document44 pagesMemoire Finaleee3Bilal CheboukiNo ratings yet
- 9005 Modelisation Modelica Sous ScilabDocument16 pages9005 Modelisation Modelica Sous ScilabkamalNo ratings yet
- (Annales 3GE) (ETEP1) (DS) 2014 SDocument5 pages(Annales 3GE) (ETEP1) (DS) 2014 SHamza SadikNo ratings yet
- Devoir Engrenages eDocument8 pagesDevoir Engrenages esb ali100% (1)
- Mande de MAS-1Document8 pagesMande de MAS-1Hakim Madrid100% (1)
- Saturation MASDocument6 pagesSaturation MASMagloire TshihilukaNo ratings yet
- Chapitre 3 Modelisation Dynamique Machine Synchrone TriphaseeDocument13 pagesChapitre 3 Modelisation Dynamique Machine Synchrone TriphaseeIslam MęĐjNo ratings yet
- Exam 2010 Elts de Reponse PDFDocument4 pagesExam 2010 Elts de Reponse PDFCharaf LeoNo ratings yet
- TD-ELT-M1-EI-EE-Entrainement ElectriqueDocument6 pagesTD-ELT-M1-EI-EE-Entrainement ElectriqueChristo RouynNo ratings yet
- OutputDocument3 pagesOutputMohamed SaidiNo ratings yet
- Chapitre1 2Document12 pagesChapitre1 2younes ghenamNo ratings yet
- MACHINES Chap 2 M.AsynchroneDocument15 pagesMACHINES Chap 2 M.AsynchroneAmiiRaNo ratings yet
- Test - Dim Eléments de Machines - lgm2 - 2021Document5 pagesTest - Dim Eléments de Machines - lgm2 - 2021Khaled GammoudiNo ratings yet
- Chap. II Machine Synchrone TriphaséeDocument29 pagesChap. II Machine Synchrone Triphaséelamrabtemohammed70No ratings yet
- 517111320940_ilovepdf_merged-1-Document23 pages517111320940_ilovepdf_merged-1-yahyaouimohamedamine309No ratings yet
- Chapitre 2modãlisation de MAS Et MSDocument14 pagesChapitre 2modãlisation de MAS Et MSMaram MërïemNo ratings yet
- Devoir 1 EST-1Document6 pagesDevoir 1 EST-1josias zinsouNo ratings yet
- BenfedaRachid AmraneBoussad ChaoucheAzizDocument90 pagesBenfedaRachid AmraneBoussad ChaoucheAzizAI DjNo ratings yet
- Correction TD MASDocument12 pagesCorrection TD MASHassan Guenzaouz100% (4)
- TP 2 ElectroniquedepuissanceDocument22 pagesTP 2 ElectroniquedepuissanceHemici AbdelmoumenNo ratings yet
- TD AsynchDocument2 pagesTD AsynchKadri MongiNo ratings yet
- Modelisation de La MASDocument20 pagesModelisation de La MASsaadbaraa100% (1)
- Epnu Zero 20....Document2 pagesEpnu Zero 20....Maurice TappaNo ratings yet
- Chapitre2 MasDocument14 pagesChapitre2 MasArrow ArrowNo ratings yet
- Td.V.V.Mas: Exercice N°1Document53 pagesTd.V.V.Mas: Exercice N°1بلال سويسيNo ratings yet
- Chapitre III MAS M1 AUTODocument21 pagesChapitre III MAS M1 AUTOAymen HedNo ratings yet
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 pagesTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinNo ratings yet
- Chapitre IVDocument11 pagesChapitre IVAnisse HimeurNo ratings yet
- TP3 - Master-CE - S2 - Techniques de La Commande ÉlectriqueDocument7 pagesTP3 - Master-CE - S2 - Techniques de La Commande Électriqueabd elhamid mabroukNo ratings yet
- VI - Les Machines Asynchrones TriphaséesDocument21 pagesVI - Les Machines Asynchrones TriphaséesimadNo ratings yet
- TDN1 2 3 23Document13 pagesTDN1 2 3 23lahloulamia2020No ratings yet
- 14 Chapitre002Document17 pages14 Chapitre002brightnsenga935No ratings yet
- TD 2017Document7 pagesTD 2017BerLin DzNo ratings yet
- TD TE 6.3 Train EpiDocument4 pagesTD TE 6.3 Train EpiKamel BousninaNo ratings yet
- Chapitre 2 M1 MEADocument32 pagesChapitre 2 M1 MEAMOUH MIDONo ratings yet
- Dcn3 3t1 Mecanisme de Transmission CorrectionDocument4 pagesDcn3 3t1 Mecanisme de Transmission CorrectionGuiliass100% (1)
- TD20 - Train Epicycloidal - Sujet PDFDocument5 pagesTD20 - Train Epicycloidal - Sujet PDFTafotchin Kone100% (1)
- Chapitre2 MRVDocument9 pagesChapitre2 MRVMohamed Yacine RachediNo ratings yet
- Examen 2014 PG GE 02Document5 pagesExamen 2014 PG GE 02Meriem IdirNo ratings yet
- Onduleurs Et Variation de Vitesse PSIMDocument9 pagesOnduleurs Et Variation de Vitesse PSIMdarknight100% (1)
- TRIACDocument10 pagesTRIACAyman SerhanNo ratings yet
- Bovet Charmilles 1963Document25 pagesBovet Charmilles 1963zenishaNo ratings yet
- Bac2016 Polynesie Robot Tout Terrain Correction 2Document15 pagesBac2016 Polynesie Robot Tout Terrain Correction 2Ilyas MhammediNo ratings yet
- Exercices d'optique et d'électromagnétismeFrom EverandExercices d'optique et d'électromagnétismeRating: 5 out of 5 stars5/5 (1)
- Machine SynDocument45 pagesMachine SynAbderrahmane WardiNo ratings yet
- Screenshot 2021-03-22 at 05.05.06Document1 pageScreenshot 2021-03-22 at 05.05.06Abderrahmane WardiNo ratings yet
- transistorJFETv1 1 0Document33 pagestransistorJFETv1 1 0abdo08100% (1)
- Les OscillateursDocument9 pagesLes Oscillateursحنيش يوسف0% (1)
- Chapitre 4 - GradateurDocument30 pagesChapitre 4 - GradateurAbderrahmane Wardi100% (1)
- KKKKKKKKKKDocument4 pagesKKKKKKKKKKAbderrahmane WardiNo ratings yet
- FR 011216 151011 ME FGSQHQ PDFDocument12 pagesFR 011216 151011 ME FGSQHQ PDFAbderrahmane WardiNo ratings yet
- Cours Electrotechnique AvancÉ eDocument1 pageCours Electrotechnique AvancÉ eAbderrahmane WardiNo ratings yet
- Cours Electrotechnique AvancÉ eDocument42 pagesCours Electrotechnique AvancÉ eAbderrahmane WardiNo ratings yet
- BTS Phy 96Document12 pagesBTS Phy 96Abderrahmane WardiNo ratings yet
- HOW-To THRSim11 Simulation Setup (Bales) 20060828v01Document3 pagesHOW-To THRSim11 Simulation Setup (Bales) 20060828v01Abderrahmane WardiNo ratings yet
- IjDocument7 pagesIjAbderrahmane WardiNo ratings yet
- BTS PHY 98 BisDocument7 pagesBTS PHY 98 BiskernoNo ratings yet
- Cours STS1 05 RedresseursDocument21 pagesCours STS1 05 RedresseursLi Jarmouni IINo ratings yet
- CarburateurDocument3 pagesCarburateurKHALIDNo ratings yet
- Exercice Engrenages eDocument3 pagesExercice Engrenages eachraf benfateh أشرف بن فاتحNo ratings yet
- Etude Des Principaux DéfautsDocument31 pagesEtude Des Principaux DéfautsKo Kito100% (1)
- Carburateur Weber 32 Dir 4 PDFDocument5 pagesCarburateur Weber 32 Dir 4 PDFStéphane Audriaz100% (1)
- FR Cherubini Cat Acc Manuels PDFDocument119 pagesFR Cherubini Cat Acc Manuels PDFMURATNo ratings yet
- (TDP) (TD) TS Chariot de Manutention MotoriseDocument3 pages(TDP) (TD) TS Chariot de Manutention MotoriseLwd AmenyNo ratings yet
- Copex Plaquette S-WING FR-GB 2020 PlancheDocument2 pagesCopex Plaquette S-WING FR-GB 2020 PlancheNicolas BourbeyNo ratings yet
- Choix Moteur BrushlessDocument25 pagesChoix Moteur BrushlessHamza RezguiNo ratings yet
- DC2-2024-Extracteur bague-1ASDocument5 pagesDC2-2024-Extracteur bague-1ASgmar.ghaziNo ratings yet
- SSP 521 La Golf Gtigtd 2013Document48 pagesSSP 521 La Golf Gtigtd 2013HAMDANE HAMDANENo ratings yet
- Partie 2 Cotations Et TolerancesDocument17 pagesPartie 2 Cotations Et TolerancesErnest AdouNo ratings yet
- COURSDocument4 pagesCOURSYoussef YouriNo ratings yet
- Sherco 250-300 Sef-R Six - Days 2016Document41 pagesSherco 250-300 Sef-R Six - Days 2016Jose Manuel Sanchez ContrerasNo ratings yet
- Exercice Verin HydrauliqueDocument3 pagesExercice Verin Hydrauliquemerhawi memeNo ratings yet
- Pompes Et Compresseurs Exercices Et ProblemesDocument21 pagesPompes Et Compresseurs Exercices Et ProblemesHoussame Naim50% (2)
- Exo 04 05 Stat Liaison Equiv Cor PDFDocument4 pagesExo 04 05 Stat Liaison Equiv Cor PDFJourdan MbappeNo ratings yet
- MS193TDocument9 pagesMS193TBruno DenolleNo ratings yet
- Ii. Grandeurs de FonctionnementDocument7 pagesIi. Grandeurs de FonctionnementSamar ArbiNo ratings yet
- EMCO Compact 8 ManuelDocument45 pagesEMCO Compact 8 Manuelrommelgaspar100% (1)
- Hydraulique Symboles PDFDocument17 pagesHydraulique Symboles PDFwoulkanNo ratings yet
- MaintiVannes ERM FRDocument10 pagesMaintiVannes ERM FRZackk ZakariaaNo ratings yet
- Manuel D'utilisation: D 2866 E D 2866 TE D 2866 LE D 2866 LXEDocument64 pagesManuel D'utilisation: D 2866 E D 2866 TE D 2866 LE D 2866 LXEДориана КирчеваNo ratings yet
- Fiches pdf943Document211 pagesFiches pdf943Алексей Миронов100% (1)
- Mehdi Bulldozer 2Document10 pagesMehdi Bulldozer 2Abdo MokhNo ratings yet
- Synthese Vis BoulonDocument1 pageSynthese Vis BoulonNaoufel Fares100% (1)
- Guide 20competition1973Document66 pagesGuide 20competition1973GORDNo ratings yet
- Hdi Edc 15C2 Moteur DW10-1Document428 pagesHdi Edc 15C2 Moteur DW10-1lom100% (1)
- Corrigé Fiche de Travail 1Document4 pagesCorrigé Fiche de Travail 1ursulaahoulahouNo ratings yet
- Procedes de Demarrages Des Moteurs Cours 1Document11 pagesProcedes de Demarrages Des Moteurs Cours 1serignebabacarb6No ratings yet
- Liaison PivotDocument6 pagesLiaison Pivotsaded05No ratings yet