You might also like
- Stress Analysis of Pure Bending in BeamsDocument25 pagesStress Analysis of Pure Bending in BeamsgjhghjhgjNo ratings yet
- In-Class Activities: Today's ObjectivesDocument18 pagesIn-Class Activities: Today's ObjectivesAtef NazNo ratings yet
- 013391545X - Section10-2 - 10-4Document18 pages013391545X - Section10-2 - 10-4nullvalue1500No ratings yet
- MMK Bab 5Document96 pagesMMK Bab 5MaulitaNo ratings yet
- Centroid + MOI (Students)Document39 pagesCentroid + MOI (Students)Usman HafeezNo ratings yet
- CE Structural Analysis Classical Methods Deflection DeterminationDocument22 pagesCE Structural Analysis Classical Methods Deflection DeterminationNaveen Sundarrajan0% (1)
- Mechanics of Materials III:: Beam BendingDocument6 pagesMechanics of Materials III:: Beam BendingHatnusenNo ratings yet
- Sa IDocument20 pagesSa IsubhoNo ratings yet
- Lecture Notes: Module 2: Centroids & Moment of InertiaDocument23 pagesLecture Notes: Module 2: Centroids & Moment of Inertiaswenthomas100% (1)
- DES1.2 Basics of Weld DesignDocument19 pagesDES1.2 Basics of Weld DesignКонстантин ДёминовNo ratings yet
- Dynamics concepts for rigid bodiesDocument12 pagesDynamics concepts for rigid bodiesETHIOPIA INFONo ratings yet
- Stress and Strain Revisited Stress and Strain Revisited: by Jae-Il JangDocument66 pagesStress and Strain Revisited Stress and Strain Revisited: by Jae-Il JangChoe JungwooNo ratings yet
- 013391545X Section10-8Document15 pages013391545X Section10-8nullvalue1500No ratings yet
- Second Moment of AreaDocument9 pagesSecond Moment of AreaPham Cao ThanhNo ratings yet
- ME 211 Mechanics of Materials Course OverviewDocument21 pagesME 211 Mechanics of Materials Course OverviewNabeel EhsanNo ratings yet
- Bending Stress: Galileo's Illustration of A Beam Subjected To Bending, 1638Document17 pagesBending Stress: Galileo's Illustration of A Beam Subjected To Bending, 1638Prachi BhovteNo ratings yet
- The Tensor of InertiaDocument5 pagesThe Tensor of InertiacutieNo ratings yet
- Modeling The Wobble of An Electric Fan: ME 563 Mechanical Vibrations, In-Class Example ProblemDocument5 pagesModeling The Wobble of An Electric Fan: ME 563 Mechanical Vibrations, In-Class Example ProblemAbhishek AroraNo ratings yet
- 17 Boom PDFDocument21 pages17 Boom PDFHuy Khôi HàNo ratings yet
- Moment of Inertia with respect to an Inclined AxisDocument32 pagesMoment of Inertia with respect to an Inclined AxisHonorio Joshua P.No ratings yet
- Mohr's circle for visualizing plane stress statesDocument7 pagesMohr's circle for visualizing plane stress statesArianna EstructurasNo ratings yet
- Som Unit V 2 Mark & 8 Mark QBDocument14 pagesSom Unit V 2 Mark & 8 Mark QBkumaraguru SNo ratings yet
- 1988-002.a FiniteDocument26 pages1988-002.a FiniteWonna Modeste SiluéNo ratings yet
- Frames - Centre of Mass - Centroids of Sections - Distributed Loads Chapter 6.6, 9.1 - 9.2 and 4.9Document19 pagesFrames - Centre of Mass - Centroids of Sections - Distributed Loads Chapter 6.6, 9.1 - 9.2 and 4.9N DIVIJNo ratings yet
- 2.003 Engineering Dynamics Problem Set 5Document8 pages2.003 Engineering Dynamics Problem Set 5Sergio Bernal OrtegaNo ratings yet
- Composite Bodies: Today's ObjectiveDocument17 pagesComposite Bodies: Today's ObjectiveAtef NazNo ratings yet
- 1-Stress and Deflection PresentationDocument25 pages1-Stress and Deflection PresentationJulien ChanNo ratings yet
- Bending Moment Diagrams and Beam StressDocument34 pagesBending Moment Diagrams and Beam StressNoel BinoyNo ratings yet
- Lec09 PDFDocument7 pagesLec09 PDFSunbender SaikaNo ratings yet
- Lecture 12Document16 pagesLecture 12Khushboo BholeNo ratings yet
- Theory of Elasticity (2D) (Tutorial: 3)Document1 pageTheory of Elasticity (2D) (Tutorial: 3)Himanshu KumarNo ratings yet
- Topic 3BDocument75 pagesTopic 3BMuhammad Hamza Bin TahirNo ratings yet
- 013391545X Section9-2Document17 pages013391545X Section9-2Muhammad Shaqeem RosdiNo ratings yet
- Today's Objectives:: Mass Moment of InertiaDocument15 pagesToday's Objectives:: Mass Moment of InertiaAtef NazNo ratings yet
- Classification of Columns: Chapter 5 - Short ColumnDocument20 pagesClassification of Columns: Chapter 5 - Short ColumnCho Wing SoNo ratings yet
- Design and Construction of A Structure For A Three Point Bending TestDocument13 pagesDesign and Construction of A Structure For A Three Point Bending TestIñigoNo ratings yet
- Plastic BendingDocument2 pagesPlastic BendingmulyanaNo ratings yet
- Aerospace Structures Assignment: Sakshi B M 1RV19AS043 4th SemesterDocument20 pagesAerospace Structures Assignment: Sakshi B M 1RV19AS043 4th SemesterSakshi MohanNo ratings yet
- 14 - 15 - H2 - Oscillations - Notes - LecturingDocument41 pages14 - 15 - H2 - Oscillations - Notes - LecturingeltytanNo ratings yet
- Structual Analysis 2Document1 pageStructual Analysis 2bubalan SundaramNo ratings yet
- Beam LectureDocument43 pagesBeam Lecturecaddownload100% (4)
- Combined Loading: P V My TR VQ A A I J IbDocument7 pagesCombined Loading: P V My TR VQ A A I J IbAbhishek AroraNo ratings yet
- Em Ut4Document21 pagesEm Ut4david josephNo ratings yet
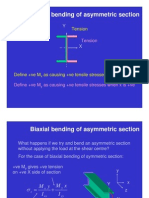
- BIAXIAL BENDING STRESS ANALYSISDocument29 pagesBIAXIAL BENDING STRESS ANALYSISnasser KhattabNo ratings yet
- Definition of Moments of Inertia For Areas, Radius of Gyration of An AreaDocument17 pagesDefinition of Moments of Inertia For Areas, Radius of Gyration of An AreaAtef NazNo ratings yet
- MOM I - Module 26Document7 pagesMOM I - Module 26Muhammad HabibNo ratings yet
- Lecture 11bDocument9 pagesLecture 11bKhushboo BholeNo ratings yet
- Mechanics of Materials III:: Beam BendingDocument10 pagesMechanics of Materials III:: Beam BendingHatnusenNo ratings yet
- Lectures37 39 Annotated 1Document23 pagesLectures37 39 Annotated 1Daniel Deng KuolNo ratings yet
- Module 1 StaticsDocument2 pagesModule 1 StaticsAl Jay CruzadoNo ratings yet
- 2017 Linear Elastic Lateral Buckling & Linear Elastic Lateral Torsional Buckling-DerksDocument20 pages2017 Linear Elastic Lateral Buckling & Linear Elastic Lateral Torsional Buckling-DerksOmar AvilaNo ratings yet
- Properti Penampang 2022Document50 pagesProperti Penampang 2022Feriawan HambalangNo ratings yet
- Chapter9 Atalet Momentleri 2Document19 pagesChapter9 Atalet Momentleri 2Daniel obiangNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Mathematical Theory of Probability and StatisticsFrom EverandMathematical Theory of Probability and StatisticsRating: 4.5 out of 5 stars4.5/5 (6)
- A Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsFrom EverandA Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsRating: 1 out of 5 stars1/5 (1)
- MIT16 07F09 Lec26Document13 pagesMIT16 07F09 Lec26stelandreouNo ratings yet
- Brake Disc SbsDocument14 pagesBrake Disc SbsnadbrahmaNo ratings yet
- Color Wheel PaintDocument2 pagesColor Wheel PaintnadbrahmaNo ratings yet
- 7 Abaqus Conv GuidelinesDocument4 pages7 Abaqus Conv GuidelinesSrinivas RallabandiNo ratings yet
- Breakfast Recipes PDFDocument61 pagesBreakfast Recipes PDFmutton moonswamiNo ratings yet
- Vakyanirmanam Lesson 01 01Document1 pageVakyanirmanam Lesson 01 01Kathesh ShahNo ratings yet
- Dry Media - by - Blixer PDFDocument137 pagesDry Media - by - Blixer PDFCamila Vitório100% (2)
- Vibrations in Milk Containers: Solved With Comsol Multiphysics 3.5ADocument10 pagesVibrations in Milk Containers: Solved With Comsol Multiphysics 3.5AnadbrahmaNo ratings yet
- Goal TrackingDocument1 pageGoal TrackingnadbrahmaNo ratings yet
- Scan by CamScanner AppDocument1 pageScan by CamScanner AppnadbrahmaNo ratings yet
- Flow Problem in A Back-Step: ObjectiveDocument3 pagesFlow Problem in A Back-Step: ObjectivenadbrahmaNo ratings yet
- 54449913Document464 pages54449913nadbrahmaNo ratings yet
- 2 DampingDocument54 pages2 DampingDharmender KumarNo ratings yet
- Acu SolveDocument185 pagesAcu SolvenadbrahmaNo ratings yet
- Hwdesktop12.0.112 RENUMBER ReleaseNotesDocument6 pagesHwdesktop12.0.112 RENUMBER ReleaseNotesnadbrahmaNo ratings yet
- Evolve 2014 Basic TrainingDocument107 pagesEvolve 2014 Basic TrainingnadbrahmaNo ratings yet
- RegressionDocument60 pagesRegressionchaiyan_05No ratings yet
- Day2 - Evolve 2014 Basic TrainingDocument47 pagesDay2 - Evolve 2014 Basic TrainingnadbrahmaNo ratings yet
- 85th Birthday Rudram Chanting With TranslationDocument26 pages85th Birthday Rudram Chanting With Translationsangeetha_ramaswam_1No ratings yet
- Day3 - Evolve 2014 Basic TrainingDocument45 pagesDay3 - Evolve 2014 Basic TrainingnadbrahmaNo ratings yet
- 19 Factorial DesignsDocument66 pages19 Factorial DesignsAslı OrbakNo ratings yet
- Moldex3D Material Lab CapabilitiesDocument18 pagesMoldex3D Material Lab CapabilitiesnadbrahmaNo ratings yet
- MVP Toolbar 2012Document36 pagesMVP Toolbar 2012nadbrahmaNo ratings yet
- DeterminationOfAdhesionEnergyAtAPolymer MetalInterfaceDocument61 pagesDeterminationOfAdhesionEnergyAtAPolymer MetalInterfacenadbrahmaNo ratings yet
- Robotics Da VinciDocument4 pagesRobotics Da VincinadbrahmaNo ratings yet
- Section 15 Contact Modeling: Innovation IntelligenceDocument10 pagesSection 15 Contact Modeling: Innovation IntelligencenadbrahmaNo ratings yet
- Bolt ModelingDocument35 pagesBolt ModelingnadbrahmaNo ratings yet
- Mechatronics Modeling With Bond Graphs by Kevin Craig PDFDocument125 pagesMechatronics Modeling With Bond Graphs by Kevin Craig PDFAhmed H El ShaerNo ratings yet
- Elementsof Continuum MechanicsDocument172 pagesElementsof Continuum MechanicsnadbrahmaNo ratings yet
- 2021 NYJC JC1 H2MATH (Modified) Common Test SolutionsDocument9 pages2021 NYJC JC1 H2MATH (Modified) Common Test SolutionsGareth WongNo ratings yet
- Kruss Manual-Dsa100Document103 pagesKruss Manual-Dsa100Dave WUFEINo ratings yet
- Q2 Module 1 - Visual IllustrationDocument69 pagesQ2 Module 1 - Visual IllustrationAllen Mae AspeNo ratings yet
- ICT Lesson: Creating Graphs in Microsoft ExcelDocument49 pagesICT Lesson: Creating Graphs in Microsoft ExcelKyi Sin AyeNo ratings yet
- PYDS 3150713 Unit-4Document59 pagesPYDS 3150713 Unit-4Hetvy JadejaNo ratings yet
- Jan 2015 Paper 2Document16 pagesJan 2015 Paper 2RashedaNo ratings yet
- Chapter 4 Symmetry and Group Theory: (H) Without Inversion Centers. (H)Document42 pagesChapter 4 Symmetry and Group Theory: (H) Without Inversion Centers. (H)yecid zamir suarez día zNo ratings yet
- 2-7 DP Combined SL and HL Function TransformationsDocument5 pages2-7 DP Combined SL and HL Function TransformationsLord Sandhy PutraNo ratings yet
- Form Three Mathematics SchemesDocument23 pagesForm Three Mathematics SchemesIrene makenaNo ratings yet
- GDT Pcdmis Training Manual Issue 1 PDFDocument54 pagesGDT Pcdmis Training Manual Issue 1 PDFamr_akram_2100% (1)
- Principles of RoboticsDocument13 pagesPrinciples of RoboticsMahendran MahiNo ratings yet
- ByVision Version P80018110Document63 pagesByVision Version P80018110Olivera Vidar100% (1)
- Psi SACS PDFDocument210 pagesPsi SACS PDFNabigh NabiylNo ratings yet
- Sample Chapter4Document98 pagesSample Chapter4Faris FarsNo ratings yet
- Math 135Document2 pagesMath 135chan borbonNo ratings yet
- SignalsDocument19 pagesSignalsAlmuzreen AlihNo ratings yet
- Relation and Functions 77Document54 pagesRelation and Functions 77JU MartinNo ratings yet
- Ch09 Stress TransformationDocument116 pagesCh09 Stress TransformationMatthew MartinezNo ratings yet
- 1.calculus III (Math211) - Week 1, 2 & 3Document65 pages1.calculus III (Math211) - Week 1, 2 & 3Khaled FaisalNo ratings yet
- CV Module 1Document166 pagesCV Module 1Yogesh GargNo ratings yet
- Chapter 7 - Centroids & Centers of MassDocument64 pagesChapter 7 - Centroids & Centers of MassVarun0% (1)
- gOpenMol3 00Document209 pagesgOpenMol3 00Kristhian Alcantar MedinaNo ratings yet
- The Stright LineDocument184 pagesThe Stright LineRamNagalNo ratings yet
- 3D Viewing and Surface Detection Techniques in GraphicsDocument43 pages3D Viewing and Surface Detection Techniques in GraphicsNithin KNo ratings yet
- MATHEMATICS Compulsory Part Paper 2: 2013-DSE Math CPDocument17 pagesMATHEMATICS Compulsory Part Paper 2: 2013-DSE Math CPSandra NgNo ratings yet
- Maths-1b Previous Paper 1Document20 pagesMaths-1b Previous Paper 1fazluddinshaik96No ratings yet
- Design For X' (DES 508) : Dr. Arivazhagan. A IIITD&M, KancheepuramDocument67 pagesDesign For X' (DES 508) : Dr. Arivazhagan. A IIITD&M, KancheepuramKeerthi SagarNo ratings yet
- MATH 27 LECTURE GUIDE ON APPLICATIONS OF THE DEFINITE INTEGRALDocument22 pagesMATH 27 LECTURE GUIDE ON APPLICATIONS OF THE DEFINITE INTEGRALBryan Gerard GuillermoNo ratings yet
- Miller Indices 1Document18 pagesMiller Indices 1Vishal Gaur100% (1)
- Training Getting Started - Modeler - Din: RM Bridge V8i September 2010Document47 pagesTraining Getting Started - Modeler - Din: RM Bridge V8i September 2010Orlando LopesNo ratings yet