You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- PHYSICS O-LEVEL PAST PAPER QUESTIONS ON MOMENTSDocument7 pagesPHYSICS O-LEVEL PAST PAPER QUESTIONS ON MOMENTSelty TanNo ratings yet
- Putzmeister Pump TrucksDocument17 pagesPutzmeister Pump Truckslwin_oo243575% (4)
- Cessna 172Document4 pagesCessna 172James DeatoNo ratings yet
- Mid Drive Vs HubDocument15 pagesMid Drive Vs HubRivan PamungkasNo ratings yet
- Smart AntennasDocument40 pagesSmart AntennasMeeraNo ratings yet
- TNY - 16 May 2016Document108 pagesTNY - 16 May 2016Wen ZJ100% (2)
- Di A&d 4-0Document16 pagesDi A&d 4-0Bmt BmtNo ratings yet
- The New Yorker - May 2 2016 PDFDocument84 pagesThe New Yorker - May 2 2016 PDFGunjan KhutNo ratings yet
- RS36808 DecisionModelingDocument693 pagesRS36808 DecisionModelingGunjan KhutNo ratings yet
- TMEICDocument2 pagesTMEICGunjan KhutNo ratings yet
- READMEDocument1 pageREADMEGunjan KhutNo ratings yet
- 1901 OAEE TA Positions in Cyber, RoboticsDocument3 pages1901 OAEE TA Positions in Cyber, RoboticsGunjan KhutNo ratings yet
- Data Science Mpstme Nmims Brochure 2017Document24 pagesData Science Mpstme Nmims Brochure 2017Gunjan KhutNo ratings yet
- 4 KUKA BeaupreDocument41 pages4 KUKA BeaupreMarcelo NogueiraNo ratings yet
- TS Tech Case Study 2018Document5 pagesTS Tech Case Study 2018Gunjan KhutNo ratings yet
- NN TheoryDocument138 pagesNN TheoryGunjan KhutNo ratings yet
- 3D Opportunity For Production Additive Manufacturing Makes Its (Business) Case PDFDocument17 pages3D Opportunity For Production Additive Manufacturing Makes Its (Business) Case PDFAlbertNo ratings yet
- ReadmeDocument2 pagesReadmeGunjan KhutNo ratings yet
- NMIMS University Programmes 2019Document10 pagesNMIMS University Programmes 2019Gunjan KhutNo ratings yet
- 1901 OAEE Teaching Assistantship (TA) Available PositionsDocument3 pages1901 OAEE Teaching Assistantship (TA) Available PositionsGunjan KhutNo ratings yet
- Matlab License AgreementDocument27 pagesMatlab License Agreementkrishna kanthNo ratings yet
- ReadmeDocument3 pagesReadmeDaniel MarquesNo ratings yet
- Lecture 1 - Opening LectureDocument4 pagesLecture 1 - Opening LectureGunjan KhutNo ratings yet
- Deep Reinforcement Learning Implementation For Self-Driving CarDocument11 pagesDeep Reinforcement Learning Implementation For Self-Driving CarGunjan KhutNo ratings yet
- RequirementsDocument1 pageRequirementsGunjan KhutNo ratings yet
- Lecture 1 - Opening LectureDocument4 pagesLecture 1 - Opening LectureGunjan KhutNo ratings yet
- 1D KalmanDocument3 pages1D KalmanGunjan KhutNo ratings yet
- Installation InstructionsDocument1 pageInstallation InstructionsGunjan KhutNo ratings yet
- Lecture 1 - Opening Lecture PDFDocument65 pagesLecture 1 - Opening Lecture PDFGunjan KhutNo ratings yet
- H1-10 Points PDFDocument1 pageH1-10 Points PDFGunjan KhutNo ratings yet
- Modeling and Dynamic Analysis of 6-DOF Parallel ManipulatorDocument12 pagesModeling and Dynamic Analysis of 6-DOF Parallel ManipulatorGunjan KhutNo ratings yet
- Kinematic Analysis of a Designed Gough-Stewart PlatformDocument20 pagesKinematic Analysis of a Designed Gough-Stewart PlatformGunjan KhutNo ratings yet
- Mae 493G, Cpe 493M, Mobile Robotics: 11. Introduction To Robot PlanningDocument24 pagesMae 493G, Cpe 493M, Mobile Robotics: 11. Introduction To Robot PlanningGunjan KhutNo ratings yet
- Position Control and Trajectory Tracking of The Stewart PlatformDocument27 pagesPosition Control and Trajectory Tracking of The Stewart PlatformGunjan KhutNo ratings yet
- JqueryDocument11 pagesJqueryShreyas GuduriNo ratings yet
- Mech Vi Non Traditional Machining (10me665) NotesDocument45 pagesMech Vi Non Traditional Machining (10me665) Notesnikhil0% (1)
- Electrical Circuit Analysis ProblemsDocument14 pagesElectrical Circuit Analysis ProblemsMd Rafiqul IslamNo ratings yet
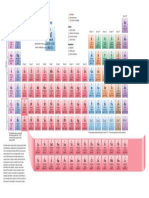
- Periodic TableDocument1 pagePeriodic TableChemist MookaNo ratings yet
- Redirection & PipingDocument16 pagesRedirection & PipingPraveen PatelNo ratings yet
- Assignment2AI - 2023 Moderated2Document11 pagesAssignment2AI - 2023 Moderated2minajadritNo ratings yet
- 01 - Lesson Plan - Fractions - Decimal - PercentDocument4 pages01 - Lesson Plan - Fractions - Decimal - PercentAnthony MontoyaNo ratings yet
- Graph Theory 6Document30 pagesGraph Theory 6Zeeshan AhmedNo ratings yet
- TG SkripsiDocument138 pagesTG SkripsiYudanto SetyoNo ratings yet
- WWW Mathworks inDocument7 pagesWWW Mathworks inRagini SharmaNo ratings yet
- Wind Load Sheet by Abid SirDocument4 pagesWind Load Sheet by Abid SirMohammad KasimNo ratings yet
- Angle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesDocument14 pagesAngle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesCHRISTIAN ZAVALANo ratings yet
- BA (Hons) Philosophy CurriculumDocument123 pagesBA (Hons) Philosophy CurriculumDARSHAN RAAJANNo ratings yet
- OpenGL Basic FunctionsDocument21 pagesOpenGL Basic FunctionsAishwaryaNawkarNo ratings yet
- 1956 - Colinese - Boiler Efficiencies in SugarDocument7 pages1956 - Colinese - Boiler Efficiencies in SugarPaul DurkinNo ratings yet
- Areas Related To CircleDocument32 pagesAreas Related To CircleGiorno GiovannaNo ratings yet
- LEMBARAN KERJA BI TAHUN 4 (m7-10) PDPRDocument9 pagesLEMBARAN KERJA BI TAHUN 4 (m7-10) PDPRnurulwaznahNo ratings yet
- StudenttextDocument15 pagesStudenttextapi-195130729No ratings yet
- 1) Computer Concepts NotesDocument6 pages1) Computer Concepts NotesVenus Leilani Villanueva-Granado100% (2)
- Na2xckbr2y Rev 08Document1 pageNa2xckbr2y Rev 08dardakNo ratings yet
- Technology: ControlsDocument32 pagesTechnology: ControlsAli Hossain AdnanNo ratings yet
- Unit Vi: Classification and PredictionDocument29 pagesUnit Vi: Classification and PredictionpalaniappanNo ratings yet
- Computer Science Project On Management SystemDocument26 pagesComputer Science Project On Management Systemsajid aliNo ratings yet
- Dynamic Analysis of Motor Floor: Structure DataDocument6 pagesDynamic Analysis of Motor Floor: Structure Datap_ignatiusNo ratings yet
- Fundamentals of Heat and Mass Transfer 7th Edition - Bergman, Lavine, Incropera, DeWitt (1) - p0015Document1 pageFundamentals of Heat and Mass Transfer 7th Edition - Bergman, Lavine, Incropera, DeWitt (1) - p0015CladyNo ratings yet