You might also like
- Sema Atx SmpsDocument1 pageSema Atx SmpsDeepak AnandNo ratings yet
- Script Phaze 90: Alpha 500kCDocument1 pageScript Phaze 90: Alpha 500kCOmmachineNo ratings yet
- High-voltage power supply circuit diagramDocument1 pageHigh-voltage power supply circuit diagramFábio MenezesNo ratings yet
- Adobe Scan 30 Nov 2023Document1 pageAdobe Scan 30 Nov 2023Sohira QaziNo ratings yet
- Big Muff PI 77 Opamp - Layout - Ready-To-transfer - Schematic - Complete ProjectDocument1 pageBig Muff PI 77 Opamp - Layout - Ready-To-transfer - Schematic - Complete ProjectOmar QuispeNo ratings yet
- WWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuideDocument2 pagesWWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuidedraNo ratings yet
- Little Angel V.4 circuit diagramDocument1 pageLittle Angel V.4 circuit diagramCassava GreenNo ratings yet
- Giáo Trình 16 - Sơ Đồ Mạch Và Cách Nhận Biết Các Linh Kiện Trên MạchDocument48 pagesGiáo Trình 16 - Sơ Đồ Mạch Và Cách Nhận Biết Các Linh Kiện Trên MạchphanthanhluanNo ratings yet
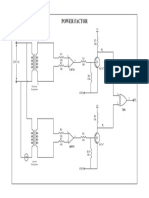
- Power Factor: Potential TransformerDocument1 pagePower Factor: Potential TransformerVadivel RajaNo ratings yet
- Amp Classe D 1500W RMS PDFDocument5 pagesAmp Classe D 1500W RMS PDFdweller100% (1)
- Vi IvDocument1 pageVi IvMadeleine Mono RojasNo ratings yet
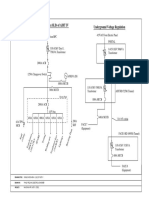
- Single Line Diagram (SLD) of ADIT IV Underground Voltage RegulationDocument1 pageSingle Line Diagram (SLD) of ADIT IV Underground Voltage RegulationThinley PelzangNo ratings yet
- Dual Mic Pre Schematic - SSM2017-Based, But INA217 & THAT1510 Are Possible Subs - Kevin Ross Celestial - ComauDocument1 pageDual Mic Pre Schematic - SSM2017-Based, But INA217 & THAT1510 Are Possible Subs - Kevin Ross Celestial - ComaucrackintheshatNo ratings yet
- Fixed Point FFT Circuit and LayoutDocument1 pageFixed Point FFT Circuit and LayoutAlexe VictorNo ratings yet
- Voltage Regulator Circuit DiagramDocument1 pageVoltage Regulator Circuit DiagramnameNo ratings yet
- CDV700Pro Construction Tutorial PDFDocument33 pagesCDV700Pro Construction Tutorial PDFjuan9gonzalez_9No ratings yet
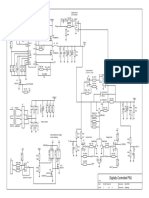
- Digitally Controlled PSU: BAT54A D5Document3 pagesDigitally Controlled PSU: BAT54A D5Tspi RitzelNo ratings yet
- JordanDocument1 pageJordanPablo EspinosaNo ratings yet
- High Voltage Shunt RegulatorDocument1 pageHigh Voltage Shunt RegulatorHertanto Setiawan Phunsuk WangduNo ratings yet
- Mach Den Khong Luu - ImageDocument1 pageMach Den Khong Luu - ImageTrí Huỳnh MinhNo ratings yet
- 22k audio taper mod for guitar amp preampDocument4 pages22k audio taper mod for guitar amp preampedi spenkNo ratings yet
- Bal869anced 976y o I68ponput v.1bDocument1 pageBal869anced 976y o I68ponput v.1bmdeky20No ratings yet
- Flyback transformer specification and circuit diagramDocument2 pagesFlyback transformer specification and circuit diagramRodrigoNo ratings yet
- PCB design schematicDocument2 pagesPCB design schematicnanang c-kakak67% (3)
- PLC Esquematico PDFDocument1 pagePLC Esquematico PDFEliecer100% (2)
- SMPS Half-Bridge 800W v1.0 PDFDocument3 pagesSMPS Half-Bridge 800W v1.0 PDFYamit PilotoNo ratings yet
- TL494 Buck BoostDocument1 pageTL494 Buck BoostMufasirNo ratings yet
- Daylight BlockingDocument1 pageDaylight BlockingAMANNo ratings yet
- KSGER 96W 24V 5A Electric Power Supply Unit For STM32 STC OLED T12 Digital DIY Soldering Station ControllerDocument1 pageKSGER 96W 24V 5A Electric Power Supply Unit For STM32 STC OLED T12 Digital DIY Soldering Station ControllerTom Tom100% (3)
- System 1 Display PWR SupplyDocument1 pageSystem 1 Display PWR Supplystef34980No ratings yet
- Laney AH50Document2 pagesLaney AH50Zoeloe_2No ratings yet
- IrsolwibDocument4 pagesIrsolwibleko17100% (2)
- SchematicDocument1 pageSchematicdidin pratamaNo ratings yet
- 350W Sine Inverter TOPDocument1 page350W Sine Inverter TOPNgọc Hưng TạNo ratings yet
- Reference Design-6 STR-W6756 Universal-Input 140 W Power SupplyDocument2 pagesReference Design-6 STR-W6756 Universal-Input 140 W Power SupplyShamol KormokerNo ratings yet
- ECHOFEX SchematicDocument1 pageECHOFEX SchematicHristoIlievNo ratings yet
- McBennett VCF - R27 RevDocument1 pageMcBennett VCF - R27 RevAdrianoEngelNo ratings yet
- SuperliteIIb circuit revisions and power supply changesDocument12 pagesSuperliteIIb circuit revisions and power supply changesesantucciNo ratings yet
- Amplifier MAIN PCB IRS2092 Bottom Layer RasporedDocument1 pageAmplifier MAIN PCB IRS2092 Bottom Layer RasporedDaniel Norberto DemariaNo ratings yet
- EL84 valve amplifier circuitDocument1 pageEL84 valve amplifier circuitkosarobNo ratings yet
- 12 To 32 Volt SmpsDocument2 pages12 To 32 Volt SmpsFernando SotoNo ratings yet
- Schematic Circuit AnalysisDocument2 pagesSchematic Circuit AnalysisMauricio Ferreira MasafeNo ratings yet
- Experiment Title: Study of Operational Amplifier As Precision Rectifier ObjectiveDocument2 pagesExperiment Title: Study of Operational Amplifier As Precision Rectifier ObjectiveAaa AaaNo ratings yet
- PIC16F72: LM393 C1815 PC817 5K 5K 5K Transformer Bilal Electronics KarachiDocument1 pagePIC16F72: LM393 C1815 PC817 5K 5K 5K Transformer Bilal Electronics KarachiMian FahimNo ratings yet
- Lista Componentes: 10 K 1 K 220 K 1K5 22 Uf 100 VDocument1 pageLista Componentes: 10 K 1 K 220 K 1K5 22 Uf 100 Vjorge luiz pereira cabralNo ratings yet
- WWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuideDocument1 pageWWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuidedraNo ratings yet
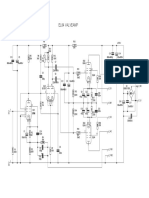
- Clase D AmplifierDocument1 pageClase D AmplifierMarcel LanNo ratings yet
- Regulator not needed if 12V is guaranteed for remote touch switch sensorDocument1 pageRegulator not needed if 12V is guaranteed for remote touch switch sensorAlberto CorralesNo ratings yet
- WP210F11 ProtectDocument1 pageWP210F11 ProtectLaboratorio CipollettiNo ratings yet
- IN OUT: For 12 VDC Supply Input & Load: Omit U2 IC and Use Jumper As Shown BelowDocument1 pageIN OUT: For 12 VDC Supply Input & Load: Omit U2 IC and Use Jumper As Shown BelowJuan TiradoNo ratings yet
- 26 String Monitoring - SubicDocument1 page26 String Monitoring - Subicjohn jason bayudanNo ratings yet
- Voltage MeterDocument1 pageVoltage Meter吳語 Wú Yǔ Wu.No ratings yet
- Current controls halogen lamp dimmingDocument1 pageCurrent controls halogen lamp dimmingB M SinghNo ratings yet
- Simulation of Adc and Dac Circuits - E3Document6 pagesSimulation of Adc and Dac Circuits - E3Carlos GamioNo ratings yet
- SineWave Home UPS Microcontroller DesignDocument14 pagesSineWave Home UPS Microcontroller DesignMian FahimNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Codesys Opc ServerDocument36 pagesCodesys Opc ServerKhajwa Mere KhwajaNo ratings yet
- OPC UA Client S7-1500 DOKU V10 enDocument46 pagesOPC UA Client S7-1500 DOKU V10 ensaravananNo ratings yet
- ESP8266 DHT11 Humidity Temperature Data LoggerDocument6 pagesESP8266 DHT11 Humidity Temperature Data LoggersaravananNo ratings yet
- Industry 4.0: The Internet of ThingsDocument2 pagesIndustry 4.0: The Internet of ThingssaravananNo ratings yet
- ArduinoDocument3 pagesArduinoWilliam Jaldin CorralesNo ratings yet
- ESP8266 JQuery and AJAX Web ServerDocument4 pagesESP8266 JQuery and AJAX Web ServersaravananNo ratings yet
- Esp 8266Document5 pagesEsp 8266saravanan100% (1)
- New Microsoft Excel WorksheetDocument1 pageNew Microsoft Excel WorksheetsaravananNo ratings yet
- 2017.04.ESP32 IntroDocument18 pages2017.04.ESP32 IntroRommelNo ratings yet
- ScadaDocument8 pagesScadasaravananNo ratings yet
- Industry 4.0: The Internet of ThingsDocument2 pagesIndustry 4.0: The Internet of ThingssaravananNo ratings yet
- ADAM-4520 and ADAM-4510 converter and repeater module settingsDocument4 pagesADAM-4520 and ADAM-4510 converter and repeater module settingssaravananNo ratings yet
- Getting Started: Creating A Simple Siemens MPI Protocol ApplicationDocument24 pagesGetting Started: Creating A Simple Siemens MPI Protocol ApplicationsaravananNo ratings yet
- 200W Single Output Switching Power Supply: SeriesDocument4 pages200W Single Output Switching Power Supply: SeriessaravananNo ratings yet
- Manual Arduino UnoDocument8 pagesManual Arduino UnoNuwando IbrahimaNo ratings yet
- 1318 27223 M.Javeed Basha 1329 27225 R.SivasankariDocument1 page1318 27223 M.Javeed Basha 1329 27225 R.SivasankarisaravananNo ratings yet
- Overview SerialCommunication enDocument2 pagesOverview SerialCommunication ensaravananNo ratings yet
- EncoderDocument1 pageEncodersaravananNo ratings yet
- XU2Document4 pagesXU2saravananNo ratings yet
- Using Basic Script in ADAMView To Open A COMport To Send ASCII CommandsDocument2 pagesUsing Basic Script in ADAMView To Open A COMport To Send ASCII CommandssaravananNo ratings yet
- 2 - 3 - 4-Wire RTD MeasurementDocument9 pages2 - 3 - 4-Wire RTD MeasurementtotovasiNo ratings yet
- PDFDocument2 pagesPDFsaravananNo ratings yet
- Scada 130328230649 Phpapp02Document16 pagesScada 130328230649 Phpapp02saravananNo ratings yet
- 74HC HCT00Document15 pages74HC HCT00Thierry BizimunguNo ratings yet
- ADC 4-20 v1.2 ENDocument1 pageADC 4-20 v1.2 ENsaravananNo ratings yet
- 74HC HCT00Document15 pages74HC HCT00Thierry BizimunguNo ratings yet
- What+is+the+serial+data+format+of+the+ADAM-4520 4510Document2 pagesWhat+is+the+serial+data+format+of+the+ADAM-4520 4510saravananNo ratings yet
- SE 610 Operating Manual EDocument4 pagesSE 610 Operating Manual EsaravananNo ratings yet
- 5006RN-LC5296H - R3F-0617Document2 pages5006RN-LC5296H - R3F-0617Vaibhav DiwanNo ratings yet
- Untitled Diagram - DrawioDocument1 pageUntitled Diagram - DrawiosaravananNo ratings yet
- BME - 182 - Ch03 - Amplifiers and Signal ProcessingDocument75 pagesBME - 182 - Ch03 - Amplifiers and Signal ProcessingUy đzNo ratings yet
- Example 2.5: Operational AmplifiersDocument3 pagesExample 2.5: Operational AmplifiersGiacomo CamillettiNo ratings yet
- Parts list for PT amplifiersDocument2 pagesParts list for PT amplifiersPepe NavaNo ratings yet
- Op-AmpDocument43 pagesOp-AmpHriday TejwaniNo ratings yet
- Ece 321 Lecture RevDocument158 pagesEce 321 Lecture RevPaolo TuazonNo ratings yet
- UEEA2333 Analog Electronics Tutorial SolutionsDocument3 pagesUEEA2333 Analog Electronics Tutorial SolutionssadyehclenNo ratings yet
- Design Low Noise Amplifier for ISM BandDocument4 pagesDesign Low Noise Amplifier for ISM BandG0tBlackOpsNo ratings yet
- Cascode Amplifier DesignDocument7 pagesCascode Amplifier DesignKhurram SamiNo ratings yet
- Analogue Electronics Iv - Practical UpdatedDocument8 pagesAnalogue Electronics Iv - Practical UpdatedAbba AbubakarNo ratings yet
- Opamp Function GeneratorDocument2 pagesOpamp Function GeneratorchethaNo ratings yet
- Ab763 Twin Reverb "Blackface" Amp: Normal VibratoDocument1 pageAb763 Twin Reverb "Blackface" Amp: Normal VibratoAnonymous C05BLcNo ratings yet
- 2006 Bookmatter AnalogDesignEssentialsDocument5 pages2006 Bookmatter AnalogDesignEssentialsgarbagepatchNo ratings yet
- Tutorial CH 3Document33 pagesTutorial CH 3gebretsadkan abrhaNo ratings yet
- Experiment 4Document3 pagesExperiment 4Vaibhav Rāj SinghNo ratings yet
- The Ua741 Operational AmplifierDocument25 pagesThe Ua741 Operational AmplifierHari DimoshiNo ratings yet
- Class B Complementary Symmetry Power AmplifierDocument15 pagesClass B Complementary Symmetry Power AmplifierMuthukrishnan Vijayan VijayanNo ratings yet
- Lecture 20: - Review of MOSFET Amplifiers - MOSFET Cascode Stage - MOSFET Current Mirror Reading: Chapter 9Document12 pagesLecture 20: - Review of MOSFET Amplifiers - MOSFET Cascode Stage - MOSFET Current Mirror Reading: Chapter 9Diana MaldonadoNo ratings yet
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- Lecture 11 - Opaerational Amplifiers-3Document48 pagesLecture 11 - Opaerational Amplifiers-3Kamran AbdullahNo ratings yet
- Concept of Frequency Compensation: A A F F F J J J F F FDocument5 pagesConcept of Frequency Compensation: A A F F F J J J F F FVijay RajNo ratings yet
- Precision RectifierDocument3 pagesPrecision RectifierQuentanahNo ratings yet
- CHAPTER 2 DR Wan ZulDocument19 pagesCHAPTER 2 DR Wan Zulnurul najwaNo ratings yet
- Tutorial: Quartz Crystal Oscillators & Phase-Locked LoopsDocument21 pagesTutorial: Quartz Crystal Oscillators & Phase-Locked LoopsgezahegnNo ratings yet
- LICDocument362 pagesLICKrishnaNo ratings yet
- OP-AMP AND OTA BASICS EXPLAINEDDocument41 pagesOP-AMP AND OTA BASICS EXPLAINEDAman VatsNo ratings yet
- ELL 100 - Introduction to Electrical Engineering: Network Theorems - Thevenin & Norton Equivalents (40chDocument71 pagesELL 100 - Introduction to Electrical Engineering: Network Theorems - Thevenin & Norton Equivalents (40chjyothi sahukaraNo ratings yet
- Basic Op AmpDocument15 pagesBasic Op AmpBudi Abu Ibrohim100% (1)
- GP-AMP Terminals Instruction: Please Refer To Manual For GP-SA (EM03040E) For CalibrationDocument1 pageGP-AMP Terminals Instruction: Please Refer To Manual For GP-SA (EM03040E) For CalibrationDaniel DuongNo ratings yet
- Analog AssignmentDocument5 pagesAnalog AssignmentLiSinVivianNo ratings yet