You might also like
- Methods of Linear Control TheoryDocument20 pagesMethods of Linear Control TheoryFawaz PartoNo ratings yet
- IEEE ConferenceDocument7 pagesIEEE ConferenceFawaz PartoNo ratings yet
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisDocument7 pagesModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoNo ratings yet
- Lecture 5: Model-Free Control: David SilverDocument43 pagesLecture 5: Model-Free Control: David SilverFawaz PartoNo ratings yet
- Lecture 37PNEUMATICS ACTUATORSDocument43 pagesLecture 37PNEUMATICS ACTUATORSpratapy234No ratings yet
- Mathematical Model of The Double Effect Telescopic Hydraulic DamperDocument4 pagesMathematical Model of The Double Effect Telescopic Hydraulic DamperFawaz PartoNo ratings yet
- 10 1 1 41 1193Document10 pages10 1 1 41 1193Daniel SileshiNo ratings yet
- Design and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationDocument8 pagesDesign and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationAJER JOURNALNo ratings yet
- Positioning System with Proportional Pressure RegulatorsDocument6 pagesPositioning System with Proportional Pressure RegulatorsFawaz PartoNo ratings yet
- Mathematical Model of a High Performance Pneumatic Force Actuator SystemDocument27 pagesMathematical Model of a High Performance Pneumatic Force Actuator SystemFawaz PartoNo ratings yet
- Nonlinear Control of An Inverted PendulumDocument108 pagesNonlinear Control of An Inverted PendulumFawaz PartoNo ratings yet
- Lec10 ControlDocument33 pagesLec10 Controlammar120No ratings yet
- Islamic FestivalsDocument14 pagesIslamic FestivalsFawaz Parto100% (1)
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoNo ratings yet
- Xuetal Chapterrev4Document28 pagesXuetal Chapterrev4Fawaz PartoNo ratings yet
- Libro Astrom-Ch4 Control SystemsDocument33 pagesLibro Astrom-Ch4 Control SystemsjuliolaurensNo ratings yet
- ControlDocument47 pagesControlFawaz PartoNo ratings yet
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoNo ratings yet
- 4Document9 pages4Fawaz PartoNo ratings yet
- ECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Document116 pagesECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Karam AlmasriNo ratings yet
- CND 013 08 081006 PDFDocument7 pagesCND 013 08 081006 PDFFawaz PartoNo ratings yet
- NASA From Ping Lu Paper PDFDocument41 pagesNASA From Ping Lu Paper PDFFawaz PartoNo ratings yet
- 0306419016669037Document12 pages0306419016669037Fawaz PartoNo ratings yet
- Linearization and Stability in SimulinkDocument5 pagesLinearization and Stability in SimulinkPhạm Ngọc HòaNo ratings yet
- Aircraft Landing With Decelerated Approach (Longitudinal Movement Model)Document6 pagesAircraft Landing With Decelerated Approach (Longitudinal Movement Model)Fawaz PartoNo ratings yet
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoNo ratings yet
- Coupled Spring PDFDocument16 pagesCoupled Spring PDFa_oucharNo ratings yet
- 2392 3302 PDFDocument80 pages2392 3302 PDFFawaz PartoNo ratings yet
- Aircraft RotorcraftDocument26 pagesAircraft Rotorcraftmoj33No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lab3 1Document7 pagesLab3 1api-458764744No ratings yet
- RiegelsAerofoilSections Info FW190 AirfoilDocument292 pagesRiegelsAerofoilSections Info FW190 Airfoilranickng1No ratings yet
- M1 Prep Booklet GuideDocument11 pagesM1 Prep Booklet GuideRadu PopescuNo ratings yet
- JEE Physics Syllabus SummaryDocument2 pagesJEE Physics Syllabus SummaryChandra SekharNo ratings yet
- Stub Matching PDFDocument23 pagesStub Matching PDFNguyễn Văn HuyNo ratings yet
- Answer All Questions in This SectionDocument6 pagesAnswer All Questions in This SectionAri AdiantariNo ratings yet
- Atoms, Elements and Periodic TableDocument78 pagesAtoms, Elements and Periodic TableConverticus RichardNo ratings yet
- On Solution of Sylvester Equation PDFDocument3 pagesOn Solution of Sylvester Equation PDFAzhar MahmoodNo ratings yet
- Chinese Physics Olympiad 2017 Finals Theoretical Exam: Translated By: Wai Ching Choi Edited By: Kushal ThamanDocument7 pagesChinese Physics Olympiad 2017 Finals Theoretical Exam: Translated By: Wai Ching Choi Edited By: Kushal Thamansmritidipa m100% (1)
- Welding TerminologyDocument5 pagesWelding TerminologyKaruppiah ArunachalamNo ratings yet
- Virtual Molecular Shapes WorksheetDocument4 pagesVirtual Molecular Shapes WorksheetVillanueva AlfhineNo ratings yet
- Physics 4A Conceptual Questions on Vectors and KinematicsDocument6 pagesPhysics 4A Conceptual Questions on Vectors and KinematicsdsowmNo ratings yet
- Trigonometric Identities - PurplemathDocument4 pagesTrigonometric Identities - PurplemathIsi ObohNo ratings yet
- Paramedical UG: RUHS Entrance Examination 2019 Question PaperDocument17 pagesParamedical UG: RUHS Entrance Examination 2019 Question PaperAhmd UllahNo ratings yet
- Example.: Prove U e (X Sin y - y Cos Y) Is AnalyticDocument3 pagesExample.: Prove U e (X Sin y - y Cos Y) Is AnalyticZohaib AfridiNo ratings yet
- Random ProcessesDocument112 pagesRandom ProcessesA.BenhariNo ratings yet
- H S S X S S HDocument4 pagesH S S X S S HahmadskhanNo ratings yet
- 2k15-ES Lec-5 3D Forces SystemDocument31 pages2k15-ES Lec-5 3D Forces SystemUsama KhanNo ratings yet
- Multiple Fourier Series and Fourier IntegralsDocument95 pagesMultiple Fourier Series and Fourier IntegralsdrunkfsoulNo ratings yet
- SPM Phy Quantity of Heat IDocument13 pagesSPM Phy Quantity of Heat ICHINEMEREM EZEHNo ratings yet
- (ARCHIVED) 6751 - 01 - QP - 20090115 - 3Document15 pages(ARCHIVED) 6751 - 01 - QP - 20090115 - 3Joshua Gonzalez0% (1)
- Reactor de NeutroDocument7 pagesReactor de NeutroJosePaen100% (2)
- Module Heat - Answer SchemeDocument27 pagesModule Heat - Answer SchemeCart KartikaNo ratings yet
- Elmer'S Products, Inc: Pegamento para Madera. (E7040) Hoja TecnicaDocument3 pagesElmer'S Products, Inc: Pegamento para Madera. (E7040) Hoja TecnicaRafael Mul OcampoNo ratings yet
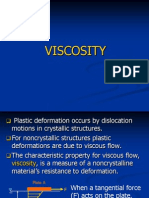
- 15 ViscoelasticityDocument30 pages15 ViscoelasticityaderancNo ratings yet
- Advanced Applications of Engineered Nanomaterials - Material Matters v2n1Document28 pagesAdvanced Applications of Engineered Nanomaterials - Material Matters v2n1Sigma-Aldrich100% (7)
- Solution Manual For Chemistry An Atoms First Approach 2nd Edition by Zumdahl ISBN 1305079248 9781305079243Document30 pagesSolution Manual For Chemistry An Atoms First Approach 2nd Edition by Zumdahl ISBN 1305079248 9781305079243henryarmstrongypajbizoqe100% (28)
- Quasi ParticleDocument6 pagesQuasi ParticleTeka KamNo ratings yet
- FOR CHEIUICAL, MICROBIOLOGICAL E CIVIL ENGGDocument8 pagesFOR CHEIUICAL, MICROBIOLOGICAL E CIVIL ENGGAnkush Patial100% (1)
- Periodic TableDocument17 pagesPeriodic TableTata mobimbaNo ratings yet